You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- CSE Termwork-2018 - ALV - 2150909Document71 pagesCSE Termwork-2018 - ALV - 2150909Milan ModhawadiyaNo ratings yet
- Unit-1 NotesDocument43 pagesUnit-1 NotesMD SHAHRIARMAHMUDNo ratings yet
- 1 - Introduction To Control SystemsDocument11 pages1 - Introduction To Control SystemsKenzie WalipiNo ratings yet
- EEN 407 Sample QuestionsDocument41 pagesEEN 407 Sample QuestionsAbu SiddiqueNo ratings yet
- Control Engineering Instructional Module LecturesDocument13 pagesControl Engineering Instructional Module LecturesJohn Kenneth Santiago PaulinoNo ratings yet
- Controller (Notes)Document22 pagesController (Notes)Alex OsesNo ratings yet
- Control System4Document115 pagesControl System4Wilson BethuelNo ratings yet
- Fedbak CNTRL RevDocument35 pagesFedbak CNTRL RevMisge ChekoleNo ratings yet
- EC6405 Syllabus Control Systems Engineering Class III EEEDocument16 pagesEC6405 Syllabus Control Systems Engineering Class III EEEAruna ChandranNo ratings yet
- Sub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-ADocument12 pagesSub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-AgallantprakashNo ratings yet
- Control System Unit 1 (5 TH Sem.)Document61 pagesControl System Unit 1 (5 TH Sem.)kishan guptaNo ratings yet
- Introduction to Control SystemsDocument23 pagesIntroduction to Control SystemsJagan JagaNo ratings yet
- Fundamentals of Control Systems in 40 CharactersDocument23 pagesFundamentals of Control Systems in 40 CharactersSona LavaniaNo ratings yet
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiNo ratings yet
- Control System Engineering (15A02303) : Lecture Note B.TechDocument126 pagesControl System Engineering (15A02303) : Lecture Note B.TechNAZMUS SAKIBNo ratings yet
- Introduction To Control Systems: Theme 1Document16 pagesIntroduction To Control Systems: Theme 1Murphy's LawNo ratings yet
- Lecture 1Document26 pagesLecture 1ahmedelebyaryNo ratings yet
- Control Systems NotesDocument152 pagesControl Systems Notesdarlachantisaideepthi450No ratings yet
- Study, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofDocument10 pagesStudy, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofTana AzeezNo ratings yet
- Ece IV Control Systems (10es43) Notes1Document205 pagesEce IV Control Systems (10es43) Notes1Nithindev GuttikondaNo ratings yet
- Control Systems and Task of Control Engineers 1.1 Introduction To Control EngineeringDocument7 pagesControl Systems and Task of Control Engineers 1.1 Introduction To Control EngineeringMagarsaa Qana'iiNo ratings yet
- University of Khartoum Faculty of Engineering Chemical Engineering DepartmentDocument25 pagesUniversity of Khartoum Faculty of Engineering Chemical Engineering DepartmentmurtadaNo ratings yet
- Unit 7 and 8Document32 pagesUnit 7 and 8Alton S H ChenNo ratings yet
- Sampling in Closed Loop Control Systems: 6.1 Digital Control and Optimal Signal ReconstructionDocument24 pagesSampling in Closed Loop Control Systems: 6.1 Digital Control and Optimal Signal ReconstructionAyad M Al-AwsiNo ratings yet
- Control System EngineeringDocument125 pagesControl System Engineeringcüneyt şanNo ratings yet
- Control Systems NotesDocument133 pagesControl Systems Noteseee limatNo ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- Cpe 315 Feedback Control System LessonsDocument28 pagesCpe 315 Feedback Control System Lessonskeny amigableNo ratings yet
- Unit IDocument7 pagesUnit IanandhNo ratings yet
- Control System Engineering: Figures in The Bracket Indicate Full MarksDocument1 pageControl System Engineering: Figures in The Bracket Indicate Full MarksAnand JindalNo ratings yet
- Robust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power SystemDocument9 pagesRobust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power Systemsjo05No ratings yet
- Principles of Automatic ControlDocument26 pagesPrinciples of Automatic ControlMesut OzilNo ratings yet
- Effect Relationship For TheDocument5 pagesEffect Relationship For TheByron MawoyoNo ratings yet
- Introduction: Automatic Control Systems: Open-Loop SystemDocument8 pagesIntroduction: Automatic Control Systems: Open-Loop SystemmanishkastwarNo ratings yet
- Questions and Answers Part-A Unit - I Systems Components and Their RepresentationDocument29 pagesQuestions and Answers Part-A Unit - I Systems Components and Their RepresentationPacha Kolandha NanuNo ratings yet
- Chapter 1 Introduction To Control SystemsDocument36 pagesChapter 1 Introduction To Control SystemsBoon Keat Chung0% (1)
- Classical Control 2 Sche A MeDocument6 pagesClassical Control 2 Sche A MeEric Leo AsiamahNo ratings yet
- Control Systems Engineering 5Document5 pagesControl Systems Engineering 5ANo ratings yet
- Control Engineering Is Based On The Foundations of Feedback Theory and Linear System Analysis, and It GeneratesDocument38 pagesControl Engineering Is Based On The Foundations of Feedback Theory and Linear System Analysis, and It GeneratesRajeev ValunjkarNo ratings yet
- ECE - Control System 1 AprDocument9 pagesECE - Control System 1 Aprmukesh soniNo ratings yet
- Chapter 1 IntroductionDocument68 pagesChapter 1 IntroductionNtiyisoColbertNo ratings yet
- BIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSDocument15 pagesBIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSNoor AhmedNo ratings yet
- Lab 1Document4 pagesLab 1Abdalla Fathy100% (1)
- J.B. Institute Control Systems Lecture NotesDocument135 pagesJ.B. Institute Control Systems Lecture Notessugunasri UNo ratings yet
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNo ratings yet
- PID control of inverted pendulum systemDocument11 pagesPID control of inverted pendulum systemShivankyJaiswalNo ratings yet
- Feedback Control TheoryDocument16 pagesFeedback Control TheorykelvinNo ratings yet
- Linear Systems Project Report Analysis and Control DesignDocument22 pagesLinear Systems Project Report Analysis and Control DesignJie RongNo ratings yet
- Chapter 7 Buku NelsonDocument6 pagesChapter 7 Buku Nelsoncatia asdosNo ratings yet
- Control Systems Engineering Block Diagram and ExamplesDocument6 pagesControl Systems Engineering Block Diagram and ExampleshariNo ratings yet
- Program: Automated Vehicle Control SystemsDocument12 pagesProgram: Automated Vehicle Control SystemsKalakriti IITINo ratings yet
- Ec2255 - Control SystemDocument42 pagesEc2255 - Control SystemK.RajkumarNo ratings yet
- FeedCon (Unit 1) PDFDocument17 pagesFeedCon (Unit 1) PDFAbby MacallaNo ratings yet
- Chapter - One (1) ControlDocument7 pagesChapter - One (1) Controlmesfin snowNo ratings yet
- Control System Engineering: InstructorsDocument49 pagesControl System Engineering: InstructorsHANSANo ratings yet
- Basic Terminologies in Control System SystemDocument8 pagesBasic Terminologies in Control System SystemPandimadevi GanesanNo ratings yet
- Control System 1Document15 pagesControl System 1swatiagrawal_ecNo ratings yet
- June 2022 TTDocument4 pagesJune 2022 TTmary mutungaNo ratings yet
- Electrical Classes Summary 220823 194535Document3 pagesElectrical Classes Summary 220823 194535mary mutungaNo ratings yet
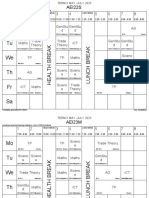
- T1 TRM2 2023 Electrical ClassesDocument31 pagesT1 TRM2 2023 Electrical Classesmary mutungaNo ratings yet
- T1 TRM2 2023 Electrical ClassesDocument31 pagesT1 TRM2 2023 Electrical Classesmary mutungaNo ratings yet
- Electric Circuit Analysis - CompleteDocument175 pagesElectric Circuit Analysis - Completemary mutunga100% (1)
- Milele Lyrics by Bella KomboDocument5 pagesMilele Lyrics by Bella Kombomary mutungaNo ratings yet
- Parts List Hardware: Type A Arm Screws&WasherDocument1 pageParts List Hardware: Type A Arm Screws&WasherYick THNo ratings yet
- HPA4 Service ManualDocument7 pagesHPA4 Service ManualMarcelo ArayaNo ratings yet
- RULES and GUIDELINES Extempo and Poster Making ContestDocument4 pagesRULES and GUIDELINES Extempo and Poster Making ContestChrisa C. TabiliranNo ratings yet
- Job Vacancies AdvertisementDocument28 pagesJob Vacancies AdvertisementRobert AzihembaNo ratings yet
- Unit1 DBMSDocument64 pagesUnit1 DBMSRaj SuraseNo ratings yet
- MATH 5 Worksheet Q1Week 1 4Document6 pagesMATH 5 Worksheet Q1Week 1 4Criza Bill LauNo ratings yet
- Journal of Energy StorageDocument14 pagesJournal of Energy StorageLuis Antonio CNo ratings yet
- Ultramatch Pro Src2496: User ManualDocument16 pagesUltramatch Pro Src2496: User ManualLuka TrengovskiNo ratings yet
- Datasheet - Vigilance Respond & Vigilance Respond ProDocument2 pagesDatasheet - Vigilance Respond & Vigilance Respond ProJohn BaleiniNo ratings yet
- Perspective, Secne Design, and Basic AnimationDocument17 pagesPerspective, Secne Design, and Basic AnimationShehnaz ObeidatNo ratings yet
- Advantages of I/O Device Management On Operating SystemDocument4 pagesAdvantages of I/O Device Management On Operating SystemIbrahim HasanNo ratings yet
- Volume II - PEFA Assessment Fieldguide (Second Edition) - Public Expenditure and Financial Accountability (PEFA)Document3 pagesVolume II - PEFA Assessment Fieldguide (Second Edition) - Public Expenditure and Financial Accountability (PEFA)Thomas nyadeNo ratings yet
- FPSMonitorDocument10 pagesFPSMonitorSirius BlackNo ratings yet
- APSC 177 Lab 2Document2 pagesAPSC 177 Lab 2Nusaiba NaimNo ratings yet
- High Rise OHEDocument35 pagesHigh Rise OHESanjay Narang100% (5)
- Stuxnet: February 2018Document17 pagesStuxnet: February 2018Schubert BalizaNo ratings yet
- Fortinet Fortigate Cli CheatsheetDocument2 pagesFortinet Fortigate Cli CheatsheetAyanNo ratings yet
- Onewheel Future Motion Pint User Manual English Funshop ViennaDocument39 pagesOnewheel Future Motion Pint User Manual English Funshop Vienna1977pascoalNo ratings yet
- E-mail Encryption Project ReportDocument15 pagesE-mail Encryption Project Reportishant7890No ratings yet
- Develop Calendar App in CDocument5 pagesDevelop Calendar App in CAshish AmbiNo ratings yet
- Role of Print Media in AdvertisementDocument14 pagesRole of Print Media in AdvertisementMoond0070% (1)
- Unit 25 Sound RecordingDocument21 pagesUnit 25 Sound Recordingapi-480389176No ratings yet
- 9Document36 pages9vscolegit shoppeNo ratings yet
- Research Proposal: Factors Effecting Online Education Among University Students of Bangladesh During Covid-19Document14 pagesResearch Proposal: Factors Effecting Online Education Among University Students of Bangladesh During Covid-19Mohaiminul IslamNo ratings yet
- E-Mobility LD DIDACTICDocument12 pagesE-Mobility LD DIDACTICromauli100% (1)
- SRX SFP 10ge Dac 1MDocument7 pagesSRX SFP 10ge Dac 1MAssem SamirNo ratings yet
- LESSON 2 Roles of Educational Technology in LearningDocument14 pagesLESSON 2 Roles of Educational Technology in LearningJenny SamoranosNo ratings yet
- Kalibrr Brochure 2020 PDFDocument12 pagesKalibrr Brochure 2020 PDFSuryadi YadiNo ratings yet
- The Passive Cooled Cabinet: Our Challenge On RailwaysDocument8 pagesThe Passive Cooled Cabinet: Our Challenge On RailwaysIrwanNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesFrom Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.From EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.No ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)