You might also like
- Javelin Mobility Ability 2.0 GuideDocument36 pagesJavelin Mobility Ability 2.0 Guideroham25156No ratings yet
- Chakra System of Animals FACT SHEETDocument4 pagesChakra System of Animals FACT SHEETNiko Diamesis75% (4)
- How Can I Have Faith - Discussion GuideDocument6 pagesHow Can I Have Faith - Discussion GuideFrank Edwin VedamNo ratings yet
- Planning of Distribution Systems Using Mixed-Integer LinearDocument10 pagesPlanning of Distribution Systems Using Mixed-Integer LinearhanabishimanNo ratings yet
- Pesgre IASDocument9 pagesPesgre IAStgangwarNo ratings yet
- (Johanna Mathieu) Scheduling Battery Energy Storage Systems Under Battery Capacity Degradation UncertaintyDocument8 pages(Johanna Mathieu) Scheduling Battery Energy Storage Systems Under Battery Capacity Degradation Uncertaintythethevenin equationNo ratings yet
- 1138-Article Text-5067-1-10-20240315Document37 pages1138-Article Text-5067-1-10-20240315jebaevaNo ratings yet
- Genetic Algorithm Based Method For Capacitor Placement Using New Sensitivity Based ApproachDocument6 pagesGenetic Algorithm Based Method For Capacitor Placement Using New Sensitivity Based ApproachArnold SNo ratings yet
- AC Versus DC Microgrid PlanningDocument9 pagesAC Versus DC Microgrid PlanningMuhammad AtiqNo ratings yet
- Optimal Scheduling For Campus Prosumer Microgrid Considering Price Based Demand ResponseDocument22 pagesOptimal Scheduling For Campus Prosumer Microgrid Considering Price Based Demand ResponseMuhammad Adnan AliNo ratings yet
- Optimal Operation of Distribution Networks Considering Energy Storage DevicesDocument12 pagesOptimal Operation of Distribution Networks Considering Energy Storage DevicesAlluri Appa RaoNo ratings yet
- Rahmani Andebili2016 PDFDocument10 pagesRahmani Andebili2016 PDFByron MoralesNo ratings yet
- Flexible Operation Batteries in RE Power SystemDocument12 pagesFlexible Operation Batteries in RE Power SystemSurajit BanerjeeNo ratings yet
- Assignment PaperDocument11 pagesAssignment PaperMuhammad MuzammalNo ratings yet
- S 'Umist,: K. UK UK UKDocument6 pagesS 'Umist,: K. UK UK UKRosa Elvira Montalvo MartínezNo ratings yet
- Tii 2019 2915089Document12 pagesTii 2019 2915089Michelle Maceas HenaoNo ratings yet
- OPTIMAL CAPACITOR PLACEMENT USING DIJKSTRA ALGORITHMDocument9 pagesOPTIMAL CAPACITOR PLACEMENT USING DIJKSTRA ALGORITHMDizky Christian HadiNo ratings yet
- Reliability and Price Risk Assessment of A Restructured Power System With Hybrid Market StructureDocument9 pagesReliability and Price Risk Assessment of A Restructured Power System With Hybrid Market StructureumairNo ratings yet
- Electric Vehicle Battery Charging Swap Stations in Distribution Systems Comparison Study and Optimal PlanningDocument9 pagesElectric Vehicle Battery Charging Swap Stations in Distribution Systems Comparison Study and Optimal PlanningKeke LongNo ratings yet
- A Planning Model For Electric Vehicle Aggregators Providing Ancillary ServicesDocument13 pagesA Planning Model For Electric Vehicle Aggregators Providing Ancillary ServiceshuseyinNo ratings yet
- Increasing Distribution Grid Hosting Capacity Through Optimal Network ReconfigurationDocument6 pagesIncreasing Distribution Grid Hosting Capacity Through Optimal Network ReconfigurationAsadNo ratings yet
- Real time dispatch ACDC SystemDocument9 pagesReal time dispatch ACDC Systemddpc.npcc3No ratings yet
- Reliability-Oriented Networking Planning VSC - JOURNALDocument10 pagesReliability-Oriented Networking Planning VSC - JOURNALDaniel Adolfo Medina CarvajalNo ratings yet
- Improved Meta-Heuristic Techniques for Simultaneous Capacitor and DG AllocationDocument12 pagesImproved Meta-Heuristic Techniques for Simultaneous Capacitor and DG AllocationSiti Annisa SyalsabilaNo ratings yet
- B14 1rv17ee004 VDocument14 pagesB14 1rv17ee004 VAnjum shariffNo ratings yet
- Schade and Egging-Bratseth 2022 Battery Degradation DispatchDocument9 pagesSchade and Egging-Bratseth 2022 Battery Degradation DispatchArideepNo ratings yet
- Incorporation of Distributed Generation and Shunt Capacitor in Radial Distribution System For Techno-Economic BenefitsDocument12 pagesIncorporation of Distributed Generation and Shunt Capacitor in Radial Distribution System For Techno-Economic BenefitsSiti Annisa SyalsabilaNo ratings yet
- Akram 2017Document16 pagesAkram 2017Ajmal FarooqNo ratings yet
- 3.Drsrg 2016 DgscupfjDocument13 pages3.Drsrg 2016 DgscupfjnarababuNo ratings yet
- Scheduling and Sizing of Campus Microgrid ConsiderDocument24 pagesScheduling and Sizing of Campus Microgrid ConsiderKashif RehmanNo ratings yet
- A Multi Objective Hybrid Algorithm For Optimal Planning of Distributed GenerationDocument20 pagesA Multi Objective Hybrid Algorithm For Optimal Planning of Distributed GenerationDrVikas Singh BhadoriaNo ratings yet
- Transmission Expansion Planning in Electricity MarketsDocument11 pagesTransmission Expansion Planning in Electricity MarketsSari M.INo ratings yet
- Delatorre2008 PDFDocument11 pagesDelatorre2008 PDFhuamanahuiNo ratings yet
- An Innovative Hybrid Wind-Solar and Battery-Supercapacitor Microgrid SystemDevelopment and OptimizationDocument16 pagesAn Innovative Hybrid Wind-Solar and Battery-Supercapacitor Microgrid SystemDevelopment and Optimizationmoulya ponnapalliNo ratings yet
- F UselessDocument3 pagesF UselessYudo Heru PribadiNo ratings yet
- Merged Capacitor Switching Based SAR ADC With Highest Switching Energy-EfficiencyDocument2 pagesMerged Capacitor Switching Based SAR ADC With Highest Switching Energy-EfficiencyalphabetagammathetaNo ratings yet
- An Effective Controlled Islanding Method For Power Grid Through A Sequence of Optimization ProblemsDocument8 pagesAn Effective Controlled Islanding Method For Power Grid Through A Sequence of Optimization ProblemsalimaghamiNo ratings yet
- A Dynamic Approach For Distribution System Planning Considering Distributed GenerationDocument10 pagesA Dynamic Approach For Distribution System Planning Considering Distributed GenerationJohan ParradoNo ratings yet
- Recent and Planned Improvements To The System Advisor ModelDocument15 pagesRecent and Planned Improvements To The System Advisor ModelTarek BouallegNo ratings yet
- Hu, 2021 - Performance Evaluation Strategy For Battery Pack of Electric VehiclesDocument11 pagesHu, 2021 - Performance Evaluation Strategy For Battery Pack of Electric Vehiclesdosen00545No ratings yet
- A Coordinated Dynamic Pricing Model For Electric Vehicle Charging StationsDocument13 pagesA Coordinated Dynamic Pricing Model For Electric Vehicle Charging StationsAli HussienNo ratings yet
- Mah Davian 2017Document4 pagesMah Davian 2017Pradeep PeriasamiNo ratings yet
- The_Influence_of_Battery_Exchange_Electric_Vehicle_and_Transmission_Line_Age_and_Loading_Related_Failures_on_Power_System_ReliabilityDocument12 pagesThe_Influence_of_Battery_Exchange_Electric_Vehicle_and_Transmission_Line_Age_and_Loading_Related_Failures_on_Power_System_Reliability賴慶明No ratings yet
- 2023 Coordinated - Planning - of - Electric - Vehicle - Charging - Infrastructure - and - Renewables - in - Power - GridsDocument12 pages2023 Coordinated - Planning - of - Electric - Vehicle - Charging - Infrastructure - and - Renewables - in - Power - GridsPower SystemNo ratings yet
- Modeling Methods of Three Phase Induction Motor: Geetanjali Manekar and Sanjay B. Bodkhe, PH.DDocument5 pagesModeling Methods of Three Phase Induction Motor: Geetanjali Manekar and Sanjay B. Bodkhe, PH.DKevin Lucas MarcilloNo ratings yet
- lm00614 Onboard DC Grid Brochure - June2014 - 1 PDFDocument8 pageslm00614 Onboard DC Grid Brochure - June2014 - 1 PDFStefanitaNo ratings yet
- An Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsDocument9 pagesAn Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsRicho TetukoNo ratings yet
- Optimal Allocation of Capacitors in Radial Distribution Systems With Distributed GenerationDocument6 pagesOptimal Allocation of Capacitors in Radial Distribution Systems With Distributed GenerationJaviForeroNo ratings yet
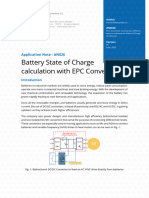
- Battery State of ChargeDocument9 pagesBattery State of ChargeMark CsenkiNo ratings yet
- Microgrid Scheduling With UncertaintyDocument10 pagesMicrogrid Scheduling With Uncertaintykrishna ReddyNo ratings yet
- Optimal Number and Placement of Automated Sectionalizing Switches For Smart Grid Distribution AutomationDocument5 pagesOptimal Number and Placement of Automated Sectionalizing Switches For Smart Grid Distribution AutomationAli HadiNo ratings yet
- Optimal Placement of Capacitor For Voltage Support and Minimizing Overall Cost in Radial Distribution SystemDocument5 pagesOptimal Placement of Capacitor For Voltage Support and Minimizing Overall Cost in Radial Distribution SystemDavid Omar Torres GutierrezNo ratings yet
- A Stochastic Method For Behind The Meter PV Battery Energy S - 2024 - Journal ofDocument10 pagesA Stochastic Method For Behind The Meter PV Battery Energy S - 2024 - Journal ofmosab.backkupNo ratings yet
- Renewable and Sustainable Energy ReviewsDocument17 pagesRenewable and Sustainable Energy Reviewsiraj_214No ratings yet
- Project ProposalDocument4 pagesProject ProposalRajesh AwalNo ratings yet
- Trabajo CircuitosDocument10 pagesTrabajo CircuitosDario PerezNo ratings yet
- Stochastiv UC in Low Inertia GridsDocument11 pagesStochastiv UC in Low Inertia GridsJorge Labra CanalesNo ratings yet
- Electric Vehicle Charging Scheme For A Park-and-Charge System Considering Battery Degradation CostsDocument13 pagesElectric Vehicle Charging Scheme For A Park-and-Charge System Considering Battery Degradation CostsAli HussienNo ratings yet
- GEEMS Paper RevisedDocument6 pagesGEEMS Paper RevisedAwishka ThuduwageNo ratings yet
- 2019 - Analytical Method For Optimal Reactive Power Support in Power NetworkDocument6 pages2019 - Analytical Method For Optimal Reactive Power Support in Power NetworkMohsin ShahzadNo ratings yet
- De Meerendre Etal IEEE Access 2020 Review of Local Network Impedance Estimation TechniquesDocument15 pagesDe Meerendre Etal IEEE Access 2020 Review of Local Network Impedance Estimation TechniqueselbakkalNo ratings yet
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Kiro Urdin BookDocument189 pagesKiro Urdin BookDane BrdarskiNo ratings yet
- Omega: Mahdi Alinaghian, Nadia ShokouhiDocument15 pagesOmega: Mahdi Alinaghian, Nadia ShokouhiMohcine ES-SADQINo ratings yet
- NYC Chocolate Chip Cookies! - Jane's PatisserieDocument2 pagesNYC Chocolate Chip Cookies! - Jane's PatisserieCharmaine IlaoNo ratings yet
- Knowledge Paper XDocument28 pagesKnowledge Paper XLaurențiu Cătălin NeagoeNo ratings yet
- ID26Document21 pagesID26Ashish BaidyanathanNo ratings yet
- Man 400eDocument324 pagesMan 400eLopez Tonny100% (1)
- How To VOR WorksDocument23 pagesHow To VOR WorksHai AuNo ratings yet
- Presentation on Indentured LabourersDocument10 pagesPresentation on Indentured LabourersAshis karmakar100% (1)
- Slide Detail For SCADADocument20 pagesSlide Detail For SCADAhakimNo ratings yet
- Cooler Ok El8sDocument11 pagesCooler Ok El8sIBRAHIM ALMANLANo ratings yet
- What Is Managerial Economics? Explain Its Nature, Scope and ItsDocument9 pagesWhat Is Managerial Economics? Explain Its Nature, Scope and Itsn13shukla85% (20)
- T2-1 MS PDFDocument27 pagesT2-1 MS PDFManav NairNo ratings yet
- SMD 40kHz Ultrasonic Transducer MA40H1SR RevGMay 7 2014Document9 pagesSMD 40kHz Ultrasonic Transducer MA40H1SR RevGMay 7 2014robert wengerNo ratings yet
- Semiconductor Optical AmplifierDocument40 pagesSemiconductor Optical AmplifierVikas ThakurNo ratings yet
- Filipino Essay 4Document3 pagesFilipino Essay 4IqbalNo ratings yet
- SHSHA Report PresentationDocument27 pagesSHSHA Report PresentationPatrick JohnsonNo ratings yet
- Anxiety, Depression and Self-Esteem in Children With Well-Controlled AsthmaDocument6 pagesAnxiety, Depression and Self-Esteem in Children With Well-Controlled AsthmaAbdallah H. KamelNo ratings yet
- Fee Structure 2023-2024Document10 pagesFee Structure 2023-2024Emmanuel NjogellahNo ratings yet
- AllareDocument16 pagesAllareGyaniNo ratings yet
- Overview of Research ProcessDocument31 pagesOverview of Research Processprema balusamyNo ratings yet
- PTR01 21050 90inst PDFDocument40 pagesPTR01 21050 90inst PDFЯн ПавловецNo ratings yet
- Horizontal Projectile MotionDocument17 pagesHorizontal Projectile MotionMark BagamaspadNo ratings yet
- Christopher Westra - Laws of Attraction PDFDocument3 pagesChristopher Westra - Laws of Attraction PDFZachary LeeNo ratings yet
- Consumer Notebook Price List For September 2010Document4 pagesConsumer Notebook Price List For September 2010Anand AryaNo ratings yet
- Jurnal Mira FixDocument16 pagesJurnal Mira Fixarisanto micoNo ratings yet
- Cultures of Learning: Language Classrooms in China: Martin Cortazzi Lixian JinDocument54 pagesCultures of Learning: Language Classrooms in China: Martin Cortazzi Lixian JinyhoulhandhariNo ratings yet