You might also like
- Strang Linear Algebra NotesDocument13 pagesStrang Linear Algebra NotesKushagraSharmaNo ratings yet
- Linear Algebra Spring 2024 جديدDocument83 pagesLinear Algebra Spring 2024 جديدAlaa Mohamed NasrallahNo ratings yet
- Solving Equations with MATLAB (Taken from the Book "MATLAB for Beginners: A Gentle Approach")From EverandSolving Equations with MATLAB (Taken from the Book "MATLAB for Beginners: A Gentle Approach")Rating: 3.5 out of 5 stars3.5/5 (11)
- Linear Algebra I: Matrix Fundamentals in 40 CharactersDocument43 pagesLinear Algebra I: Matrix Fundamentals in 40 CharactersDaniel GreenNo ratings yet
- Irjet V2i2115 PDFDocument6 pagesIrjet V2i2115 PDFManicharanNo ratings yet
- Lecture Notes Math 307Document181 pagesLecture Notes Math 307homopeniscuntfuck100% (1)
- Lecture 10Document14 pagesLecture 10Noreen KanwalNo ratings yet
- Matrix Fundamentals ExplainedDocument29 pagesMatrix Fundamentals ExplainedAlexander CorvinusNo ratings yet
- Systems of Linear Equations Math 130 Linear AlgebraDocument4 pagesSystems of Linear Equations Math 130 Linear AlgebraCody SageNo ratings yet
- 1 - Linear Algebraic EquationsDocument47 pages1 - Linear Algebraic EquationsMohd Afiq AminNo ratings yet
- Instrumentation & Control Systems Lab MEEN 4250 Lab 01 ObjectiveDocument11 pagesInstrumentation & Control Systems Lab MEEN 4250 Lab 01 ObjectiveUsama TariqNo ratings yet
- Matrices, Determinant and InverseDocument12 pagesMatrices, Determinant and InverseRIZKIKI100% (1)
- Matrix Operations GuideDocument9 pagesMatrix Operations GuideGladys MiravelesNo ratings yet
- Maths CH 2@2014Document33 pagesMaths CH 2@2014ALEMU TADESSENo ratings yet
- Direct Methods To The Solution of Linear Equations SystemsDocument42 pagesDirect Methods To The Solution of Linear Equations SystemspincoNo ratings yet
- BasisDocument23 pagesBasisPrathamesh KulkarniNo ratings yet
- Matlab 2Document40 pagesMatlab 2Husam AL-QadasiNo ratings yet
- LINEAR ALGEBRA SOLUTIONSDocument30 pagesLINEAR ALGEBRA SOLUTIONSArnab GergasiNo ratings yet
- Matlab PrimerDocument35 pagesMatlab PrimerNaresh GollapalliNo ratings yet
- SESI 5-7 Determinant and Inverse of MatrixDocument50 pagesSESI 5-7 Determinant and Inverse of MatrixBayu SaputraNo ratings yet
- Bms Project (Matrix) CompletedDocument14 pagesBms Project (Matrix) CompletedAshish Kumar82% (68)
- PPT05 - Determinant and Inverse RevisiDocument29 pagesPPT05 - Determinant and Inverse RevisiAkbar AbdillahNo ratings yet
- Matb 314 & Matb 253 - Linear AlgebraDocument30 pagesMatb 314 & Matb 253 - Linear AlgebraTilz TilanzNo ratings yet
- Solving Linear Equations with Matrices in ExcelDocument44 pagesSolving Linear Equations with Matrices in ExcelAndika SuryaNo ratings yet
- LinearAlgebra MatlabDocument12 pagesLinearAlgebra MatlabAndres Felipe CisfNo ratings yet
- Chapter 1 Topic 1 - Gaussian Elimination Method (Matrices)Document34 pagesChapter 1 Topic 1 - Gaussian Elimination Method (Matrices)Joan SilvaNo ratings yet
- Matrix ManipulateDocument59 pagesMatrix ManipulatesudhirNo ratings yet
- 04 SparseLinearSystemsDocument41 pages04 SparseLinearSystemssusma sapkotaNo ratings yet
- Determinants and Diagonalization - Linear AlgebraDocument44 pagesDeterminants and Diagonalization - Linear Algebraradhikaseelam1No ratings yet
- Experiment 4Document6 pagesExperiment 4CajiNo ratings yet
- Matrices Full Lecture NoteDocument66 pagesMatrices Full Lecture Notepuvi ththiraNo ratings yet
- Differential Equations and Linear Algebra Supplementary NotesDocument17 pagesDifferential Equations and Linear Algebra Supplementary NotesOyster MacNo ratings yet
- Systems of Linear EquationsDocument35 pagesSystems of Linear EquationsJulija KaraliunaiteNo ratings yet
- Matrix Representation of Regression Models in 40 CharactersDocument19 pagesMatrix Representation of Regression Models in 40 CharacterswerelNo ratings yet
- Quantitative Methods (10 Chapters)Document54 pagesQuantitative Methods (10 Chapters)Ravish Chandra67% (3)
- Chapter 3 of MatricesDocument12 pagesChapter 3 of MatricesSurindra KumarNo ratings yet
- Solve EQUATION MATHCAD Gauss EliminationDocument14 pagesSolve EQUATION MATHCAD Gauss Eliminationsammy_bejNo ratings yet
- Lecture 1 - Special Matrix OperationDocument20 pagesLecture 1 - Special Matrix OperationJordan Empensando OliverosNo ratings yet
- Solve Systems With Matrices: College AlgebraDocument17 pagesSolve Systems With Matrices: College AlgebraRic NapusNo ratings yet
- MTH501 Quiz-1 by Attiq Kundi-UpdatedDocument14 pagesMTH501 Quiz-1 by Attiq Kundi-UpdatedAbdurrehman M.IbrahimNo ratings yet
- AGEC516 - L9-10 - Matrix Algebra IDocument28 pagesAGEC516 - L9-10 - Matrix Algebra Ialonso estevezNo ratings yet
- Block-1 MS-08 Unit-4 PDFDocument24 pagesBlock-1 MS-08 Unit-4 PDFDrSivasundaram Anushan SvpnsscNo ratings yet
- Engineering Maths - CS - WebviewDocument10 pagesEngineering Maths - CS - WebviewSneha RNo ratings yet
- My Unit 5 Lecture DIrect MethodDocument56 pagesMy Unit 5 Lecture DIrect MethodSarbesh ChaudharyNo ratings yet
- Solving Systems of Linear Equations: Methods and ApplicationsDocument54 pagesSolving Systems of Linear Equations: Methods and ApplicationsOlha SharapovaNo ratings yet
- MatrixDocument50 pagesMatrixBoobalan RNo ratings yet
- Matrix Artical2Document12 pagesMatrix Artical2kikk59967No ratings yet
- Nouveau Document Microsoft WordDocument33 pagesNouveau Document Microsoft WordHichem MisteryouĦīħð100% (1)
- MTH603 Final Term Solved MCQ'sDocument9 pagesMTH603 Final Term Solved MCQ'sTaha ChuhdaryNo ratings yet
- Sym Band DocDocument7 pagesSym Band DocAlex CooperNo ratings yet
- ML Class Presentation NotesDocument51 pagesML Class Presentation Noteschandana kiranNo ratings yet
- Linear Algebra NotesDocument29 pagesLinear Algebra NotesArun P MadhavNo ratings yet
- Finding Roots and Solving EquationsDocument14 pagesFinding Roots and Solving Equationsgosefij566abudatNo ratings yet
- Linear AlgebraDocument215 pagesLinear AlgebraRomel G QuinteNo ratings yet
- Lab 99Document18 pagesLab 99Dom ClutarioNo ratings yet
- Numerical Analysis MCQs and Practice ProblemsDocument9 pagesNumerical Analysis MCQs and Practice ProblemsSyed Muzaffar Ali NaqviNo ratings yet
- Lecture4_Linear Algebraic Equations_11March2024_NK_v1 (3)Document53 pagesLecture4_Linear Algebraic Equations_11March2024_NK_v1 (3)yamanfNo ratings yet
- Lecture 07Document34 pagesLecture 07Ahmed SallamNo ratings yet
- Drill String Design BHA DesignDocument97 pagesDrill String Design BHA DesignAhmed SallamNo ratings yet
- Gaming ChairDocument16 pagesGaming ChairAhmed SallamNo ratings yet
- Gaming ChairDocument16 pagesGaming ChairAhmed SallamNo ratings yet
- Popular CultureDocument25 pagesPopular CultureVibhuti KachhapNo ratings yet
- Walet - Further Mathematical Methods PDFDocument79 pagesWalet - Further Mathematical Methods PDFPeter BraamsNo ratings yet
- Bio Sem2 EssayDocument2 pagesBio Sem2 EssayEileen WongNo ratings yet
- Wda 201Document72 pagesWda 201MoussaNo ratings yet
- Mohair FiberDocument33 pagesMohair FiberMuhammad Ahsan AftabNo ratings yet
- Script For TSB GRDDocument9 pagesScript For TSB GRDJuvel OrquinazaNo ratings yet
- Explore the beaches and parks of Labuan IslandDocument2 pagesExplore the beaches and parks of Labuan IslandDudeNo ratings yet
- 2GIG KEY2 345 Install GuideDocument2 pages2GIG KEY2 345 Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- 4 Floral ClockDocument4 pages4 Floral ClockmiguelibasterNo ratings yet
- Bosch EBike Product Catalogue MY2021 enDocument92 pagesBosch EBike Product Catalogue MY2021 enIvanNo ratings yet
- Differential Equations CookbookDocument2 pagesDifferential Equations CookbookAugustinZNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
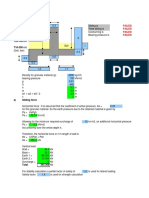
- Sliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallDocument4 pagesSliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallAbdul Aziz Julkarnain ZulkifliNo ratings yet
- NOISE ANALYSISDocument16 pagesNOISE ANALYSISDiana Rose TapelNo ratings yet
- Image Forgery DetectionDocument17 pagesImage Forgery DetectionanlemacoNo ratings yet
- Hellstorm NotesDocument57 pagesHellstorm NotesDeni ZenNo ratings yet
- Hydromechanical Piercing Perforation: Oil Service Innovation TechnologiesDocument8 pagesHydromechanical Piercing Perforation: Oil Service Innovation TechnologiesЕлена ПаниотNo ratings yet
- OrlDocument186 pagesOrlMuli MaroshiNo ratings yet
- Wood Plastic and CompositesDocument5 pagesWood Plastic and CompositesBenjie LatrizNo ratings yet
- Deks Olje ArticleDocument5 pagesDeks Olje ArticleTomMacNaughtonNo ratings yet
- Load-Out and Sea-Fastening ProcedureDocument17 pagesLoad-Out and Sea-Fastening ProcedureAdaghara100% (2)
- Hero LetterDocument3 pagesHero LetterArunachalam Muthiah0% (1)
- Comparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010Document6 pagesComparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010mtanaydinNo ratings yet
- 11 Physics Test Paper Ch3 1Document4 pages11 Physics Test Paper Ch3 1Devendar SharmaNo ratings yet
- Galactic Handbook and Synchronized MeditationsDocument91 pagesGalactic Handbook and Synchronized Meditationslapiton100% (10)
- EE 102 Cabric Final Spring08 o Id15Document10 pagesEE 102 Cabric Final Spring08 o Id15Anonymous TbHpFLKNo ratings yet
- General ALT Model For Step Stress TestDocument12 pagesGeneral ALT Model For Step Stress TestAnshul NautiyalNo ratings yet
- Mother Teresa JerseyDocument2 pagesMother Teresa JerseyTanya van Zyl100% (1)
- Pip Venix LRDocument2 pagesPip Venix LRThanh VoNo ratings yet
- Life Time Prediction of GRP Piping SystemsDocument15 pagesLife Time Prediction of GRP Piping SystemsRamon FrenchNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressFrom EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressRating: 5 out of 5 stars5/5 (1)
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)From EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Rating: 4.5 out of 5 stars4.5/5 (5)
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.From EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No ratings yet
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)