You might also like
- Relevant Characteristics of Power Lines Passing through Urban AreasFrom EverandRelevant Characteristics of Power Lines Passing through Urban AreasNo ratings yet
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- TUBE INSPECTION by RFETDocument8 pagesTUBE INSPECTION by RFETTusar Kole100% (1)
- NDE Techniques For Reliable Inspection of Carbon Steel TubesDocument9 pagesNDE Techniques For Reliable Inspection of Carbon Steel TubesramamohanNo ratings yet
- LRUT - Guided Wave Inspection TechniqueDocument40 pagesLRUT - Guided Wave Inspection TechniqueVijay Max100% (1)
- Assessment of The Capabilities of Long-Range Guided-Wave Ultrasonic InspectionsDocument23 pagesAssessment of The Capabilities of Long-Range Guided-Wave Ultrasonic InspectionsExsan OthmanNo ratings yet
- Guidedwave PipeinspectionDocument9 pagesGuidedwave PipeinspectionMohamed Zied ChaariNo ratings yet
- Long-Range Guided-Wave Ultrasonics A New Age in Pipeline Inspection - 2007 - Birch, Baker - Un PDFDocument5 pagesLong-Range Guided-Wave Ultrasonics A New Age in Pipeline Inspection - 2007 - Birch, Baker - Un PDFNazriNo ratings yet
- NDT PresentationDocument6 pagesNDT PresentationBighneswar PatraNo ratings yet
- Tubing Inspection Using Multiple NDT TechniquesDocument4 pagesTubing Inspection Using Multiple NDT TechniquesshifaNo ratings yet
- Methods-Water Leak DetectionDocument6 pagesMethods-Water Leak DetectionAbhijeeth NagarajNo ratings yet
- Tubing Inspection Using Multiple NDT TechniquesDocument7 pagesTubing Inspection Using Multiple NDT TechniquesRichard PeriyanayagamNo ratings yet
- Pipeline integrity inspection methodsDocument6 pagesPipeline integrity inspection methodsjkhgvdj mnhsnjkhgNo ratings yet
- GWUTDocument23 pagesGWUTdoctor_arvind2003100% (1)
- Si EvertDocument4 pagesSi EvertLaxmikant TiwariNo ratings yet
- Advance NDTDocument17 pagesAdvance NDTGOUTHAM RATHINAMNo ratings yet
- ECT Signal AnalysisDocument92 pagesECT Signal AnalysisMuhammad Noor Fadhli100% (8)
- Mansour2015 - Design of A Novel In-Pipe Reliable Leak DetectorDocument11 pagesMansour2015 - Design of A Novel In-Pipe Reliable Leak DetectorHenriqueNo ratings yet
- MFL Inspection r4Document54 pagesMFL Inspection r4Amritesh PandeyNo ratings yet
- MFL Inspection r4 2Document54 pagesMFL Inspection r4 2danteleonelmessi100% (2)
- Engineering Encyclopedia: Instrumented ScrapersDocument16 pagesEngineering Encyclopedia: Instrumented ScrapersabyNo ratings yet
- In-Line Inspection Programs ForDocument12 pagesIn-Line Inspection Programs ForCamilo Godoy V100% (1)
- Remote Field Technique (RFT)Document2 pagesRemote Field Technique (RFT)Abdul Moeed KalsonNo ratings yet
- Practical Considerations for Inspecting Post-Tensioned BridgesDocument7 pagesPractical Considerations for Inspecting Post-Tensioned Bridgessyndicate_mauliNo ratings yet
- RFTDocument39 pagesRFTGustavo Adolfo Rondon Zabala100% (1)
- Application Research of Eddy Current Testing in FaDocument6 pagesApplication Research of Eddy Current Testing in FaPooja AgarwalNo ratings yet
- Eddy Current IntroductionDocument21 pagesEddy Current IntroductionTerfaia NadjatNo ratings yet
- CCTV SonarDocument13 pagesCCTV SonarAlexandru AndreiNo ratings yet
- Conventional Corrosion Detection MethodDocument7 pagesConventional Corrosion Detection MethodAmir HoseiniNo ratings yet
- Automatic Inspection of Welded Pipes With Ultrasound: ECNDT 2006 - Tu.2.3.1Document14 pagesAutomatic Inspection of Welded Pipes With Ultrasound: ECNDT 2006 - Tu.2.3.1Jeremy BeltranNo ratings yet
- Acoustic Leak Detection in BoilersDocument7 pagesAcoustic Leak Detection in BoilersRajash Vk100% (1)
- 42266-041201technology Assesment ReliabilityDocument16 pages42266-041201technology Assesment ReliabilityosbertodiazNo ratings yet
- 5 Ver 2 Remote Field Eddy Current TestingDocument7 pages5 Ver 2 Remote Field Eddy Current TestingMuhammad Zariq0% (1)
- Dacon AndtDocument30 pagesDacon AndtCepi Sindang Kamulan100% (1)
- ECT Signal AnalysisDocument92 pagesECT Signal AnalysisReadersmoNo ratings yet
- Brill12 Iptc14865Document15 pagesBrill12 Iptc14865shervinyNo ratings yet
- A New Approach To Boiler, Pipeline and Turbine Inspections: Bill@steeltest - Co.za, Ezar@steeltest - Co.zaDocument10 pagesA New Approach To Boiler, Pipeline and Turbine Inspections: Bill@steeltest - Co.za, Ezar@steeltest - Co.zaInChy Rencarnation PoseidonNo ratings yet
- Why RFT Testing Is Crucial in Ferromagnetic Tubes InspectionDocument6 pagesWhy RFT Testing Is Crucial in Ferromagnetic Tubes InspectionjackNo ratings yet
- 4.4 Tomar PDFDocument9 pages4.4 Tomar PDFHyujeii MceNo ratings yet
- Sizing Stress Corrosion Cracks Using Laser Ultrasonics: AbstractDocument9 pagesSizing Stress Corrosion Cracks Using Laser Ultrasonics: AbstractHyujeii MceNo ratings yet
- 2 Radiography - X and GammaDocument11 pages2 Radiography - X and GammaChintan ShroffNo ratings yet
- Eddy Current TestingDocument73 pagesEddy Current Testingnathgsurendra100% (2)
- Locating Leaks in Sewer Pipes Using Electro-Scan - The Variation of Electric Current Flow Through The Pipe WallDocument7 pagesLocating Leaks in Sewer Pipes Using Electro-Scan - The Variation of Electric Current Flow Through The Pipe WallAhmad Zubair RasulyNo ratings yet
- Sensors 12 00518 PDFDocument16 pagesSensors 12 00518 PDFImran khanNo ratings yet
- Testing of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicDocument7 pagesTesting of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicNordin SuhadatNo ratings yet
- Pigging MFL or Ut TechniqueDocument13 pagesPigging MFL or Ut Techniquesathish_iyengarNo ratings yet
- Double Wall Single Image (DWSI)Document19 pagesDouble Wall Single Image (DWSI)vinod kumarNo ratings yet
- Corrosion Monitoring TechniquesDocument34 pagesCorrosion Monitoring TechniquesMubarik AliNo ratings yet
- OTC-26560-MS Comprehensive Well Integrity Solutions in Challenging Environments Using Latest Technology InnovationsDocument9 pagesOTC-26560-MS Comprehensive Well Integrity Solutions in Challenging Environments Using Latest Technology InnovationsheydaripostNo ratings yet
- Profile Radiography IAEADocument14 pagesProfile Radiography IAEAPaolo Ng100% (1)
- NDT Techniques: Pulsed Eddy Current (PEC) & Long Range Ultrasonic Test (LRUT)Document10 pagesNDT Techniques: Pulsed Eddy Current (PEC) & Long Range Ultrasonic Test (LRUT)abhi9792No ratings yet
- Condition Assessmen B&W Chap 45Document22 pagesCondition Assessmen B&W Chap 45Busairi AchmadNo ratings yet
- Meng2019 Article ProductionLoggingViaCoiledTubiDocument7 pagesMeng2019 Article ProductionLoggingViaCoiledTubiSteven H. Vera IllanesNo ratings yet
- Investigación Sobre Monitoreo Acústico No Intrusivo para Fugas Internas de VálvulasDocument6 pagesInvestigación Sobre Monitoreo Acústico No Intrusivo para Fugas Internas de VálvulasMau ValNo ratings yet
- Brief On RFET Based Systems & ServicesDocument3 pagesBrief On RFET Based Systems & ServicesKollabo SysNo ratings yet
- CHFR Cased Hole Formation ResistivityDocument24 pagesCHFR Cased Hole Formation ResistivityPondok HudaNo ratings yet
- Nondestructive Testing of Nonmetallic Pipelines Using Microwave Re Ectometry On An In-Line Inspection RobotDocument10 pagesNondestructive Testing of Nonmetallic Pipelines Using Microwave Re Ectometry On An In-Line Inspection RobotHAMZANo ratings yet
- Sensor TechnologiesDocument10 pagesSensor TechnologiesMiguel LiceagaNo ratings yet
- 400윤병식Document2 pages400윤병식Azmi NdtNo ratings yet
- Escon Final ReportDocument9 pagesEscon Final ReportAzmi NdtNo ratings yet
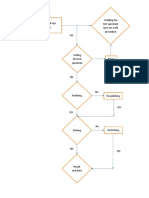
- Flow ChartDocument1 pageFlow ChartAzmi NdtNo ratings yet
- Intro To AluminumDocument51 pagesIntro To AluminumAzmi NdtNo ratings yet
- Cambridge Pre-U: Further Mathematics 9795/01Document4 pagesCambridge Pre-U: Further Mathematics 9795/01charlesmccoyiNo ratings yet
- Problem Sheet 2Document2 pagesProblem Sheet 2em mNo ratings yet
- Estimation of Power and Delay of CMOS Phase Detector Using Nano TransistorsDocument57 pagesEstimation of Power and Delay of CMOS Phase Detector Using Nano TransistorsViplav SangvaiNo ratings yet
- Silver Recovery From Waste X-Ray Photographic Films Collected From Hospitals in Addis AbabaDocument7 pagesSilver Recovery From Waste X-Ray Photographic Films Collected From Hospitals in Addis Ababamuftah76No ratings yet
- CB1 - Key Concepts in Biology (Paper 1 and 2)Document2 pagesCB1 - Key Concepts in Biology (Paper 1 and 2)Alhaji SowNo ratings yet
- Inductive and Deductive Bible StudiesDocument9 pagesInductive and Deductive Bible StudiesgethornNo ratings yet
- LM12CLKDocument14 pagesLM12CLKGheorghe DanielNo ratings yet
- Active Heave Drilling Drawworks Improve Rig EfficiencyDocument5 pagesActive Heave Drilling Drawworks Improve Rig Efficiencygplese0No ratings yet
- Data Network Threats and Penetration TestingDocument5 pagesData Network Threats and Penetration TestingJournal of Telecommunications100% (1)
- Class 3 Electron MU CalculationsDocument37 pagesClass 3 Electron MU CalculationsPanji Suryo KusumoNo ratings yet
- Protein MetabolismDocument18 pagesProtein MetabolismAbdul RehmanNo ratings yet
- Introduction To Data StructureDocument145 pagesIntroduction To Data StructurePunidha PriyaNo ratings yet
- JAVA AND JAVAUI HANDSON - Hackerrank Assessments-1 PDFDocument15 pagesJAVA AND JAVAUI HANDSON - Hackerrank Assessments-1 PDFtkkhhaarree0% (1)
- Calculation of No. of Bolts For Individual Members Bolt DiameterDocument1 pageCalculation of No. of Bolts For Individual Members Bolt DiametercharanNo ratings yet
- Transformer Winding Resistance and Equivalent CircuitDocument10 pagesTransformer Winding Resistance and Equivalent CircuitM7MD ACADEMIANo ratings yet
- Preprint Xyz IsmcDocument9 pagesPreprint Xyz IsmcThien MaiNo ratings yet
- Training Feed Forward Networks With The Marquardt AlgorithmDocument5 pagesTraining Feed Forward Networks With The Marquardt AlgorithmsamijabaNo ratings yet
- Chapter7 Powerfeed SystemDocument27 pagesChapter7 Powerfeed SystemYAKUBU A. AROGENo ratings yet
- CN Mid Paper Fall 19Document1 pageCN Mid Paper Fall 19Wajid AbbasNo ratings yet
- Design of Bunkers and SilosDocument15 pagesDesign of Bunkers and SilosSagarKasarla100% (1)
- IUAT v1.13 Engineering-3 User Manual For IndiaDocument24 pagesIUAT v1.13 Engineering-3 User Manual For IndiamgrfanNo ratings yet
- CA - AssignmentReport - 2050020Document10 pagesCA - AssignmentReport - 2050020MINH NGUYỄN TÔNNo ratings yet
- Analyzing A Geographic Data Source A. B. Visualize. SAS Visual Analytics AppearsDocument5 pagesAnalyzing A Geographic Data Source A. B. Visualize. SAS Visual Analytics AppearsAdetola AdeosunNo ratings yet
- An in Vitro Study of Hydrangea Arborescens Homoeopathic PreparatDocument7 pagesAn in Vitro Study of Hydrangea Arborescens Homoeopathic PreparatVikas ChaudharyNo ratings yet
- TFR ExperimentDocument25 pagesTFR ExperimentSiti Norbaya100% (1)
- Course Work 1Document4 pagesCourse Work 1Alice PreciousNo ratings yet
- Taskalfa 6550ci Taskalfa 7550ci: Parts ListDocument117 pagesTaskalfa 6550ci Taskalfa 7550ci: Parts ListPavel VintrichNo ratings yet
- Service Manual: SmartdriveDocument73 pagesService Manual: SmartdriveabyNo ratings yet
- McqsDocument14 pagesMcqschandramohan muruganNo ratings yet
- Heat Technology: Chapter 10 Section 4Document23 pagesHeat Technology: Chapter 10 Section 4thegedusNo ratings yet