You might also like
- Chaos AnalysisDocument38 pagesChaos AnalysisDivya LekhaNo ratings yet
- Chapter Seven: Efficient DiversificationDocument35 pagesChapter Seven: Efficient DiversificationAreej AlGhamdi100% (2)
- Marlin - Process Control (Searchable)Document1,023 pagesMarlin - Process Control (Searchable)Rana Rezeki Najeges100% (3)
- Basic Structured Grid Generation: With an introduction to unstructured grid generationFrom EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationNo ratings yet
- Mathematical Modeling and Analysis of Corruption DynamicsDocument13 pagesMathematical Modeling and Analysis of Corruption DynamicsFrank Exenower Esquivel Velandia100% (1)
- AbaqusDocument15 pagesAbaqusSri SaiNo ratings yet
- ECS455 - 2 - 4 - Erlang B Formula PDFDocument22 pagesECS455 - 2 - 4 - Erlang B Formula PDFArdiyanSatriyawanNo ratings yet
- A NURBS Enhanced Extended Finite Element Approach For Unfitted CAD AnalysisDocument17 pagesA NURBS Enhanced Extended Finite Element Approach For Unfitted CAD AnalysisbradjenoNo ratings yet
- An Introduction To Standard and EnrichedDocument92 pagesAn Introduction To Standard and EnrichedJorge Luis Garcia ZuñigaNo ratings yet
- Overlapping Multi-Patch Structures in Isogeometric AnalysisDocument43 pagesOverlapping Multi-Patch Structures in Isogeometric AnalysisJorge Luis Garcia ZuñigaNo ratings yet
- An Introduction To Isogeometric AnalysisDocument95 pagesAn Introduction To Isogeometric AnalysisgrygoriiNo ratings yet
- Non-Conforming Multipatches For NURBS-based Finite Element Analysis of Higher-Order Phase-Field Models For Brittle FractureDocument40 pagesNon-Conforming Multipatches For NURBS-based Finite Element Analysis of Higher-Order Phase-Field Models For Brittle FractureNavoar FormaitNo ratings yet
- Siam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Document23 pagesSiam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Sidney LinsNo ratings yet
- An Introduction To Standard and Enriched IsogeometDocument93 pagesAn Introduction To Standard and Enriched IsogeometficuniNo ratings yet
- Overlapping Multi-Patch Structures in Isogeometric Analysis: SciencedirectDocument29 pagesOverlapping Multi-Patch Structures in Isogeometric Analysis: SciencedirectficuniNo ratings yet
- Lezgy Nazargah2015Document41 pagesLezgy Nazargah2015ficuniNo ratings yet
- Finite Cell Method: H-And P-Extension For Embedded Domain Problems in Solid MechanicsDocument13 pagesFinite Cell Method: H-And P-Extension For Embedded Domain Problems in Solid MechanicsAnkur NaraniwalNo ratings yet
- IGA IntroductionDocument97 pagesIGA IntroductionTrinh ThinhNo ratings yet
- 7 J.S. Kushawaha - Galerkin Method - PP 39-43Document6 pages7 J.S. Kushawaha - Galerkin Method - PP 39-43nemat6064No ratings yet
- Mindlin Higher Order PlatesDocument13 pagesMindlin Higher Order PlatesNicholas FeatherstonNo ratings yet
- Review Pde RBFDocument15 pagesReview Pde RBFCristhian Paúl Neyra SalvadorNo ratings yet
- Berger Oliger 1984Document29 pagesBerger Oliger 1984Danilo AlexandreNo ratings yet
- DokkenDocument25 pagesDokkenmichele baruccaNo ratings yet
- Interior Gradient and Proximal Methods For Convex and Conic OptimizationDocument29 pagesInterior Gradient and Proximal Methods For Convex and Conic Optimizationhitzero20032131No ratings yet
- Paper Published2Document8 pagesPaper Published2Giovani Jesus Berrospi AQuinoNo ratings yet
- Local Adaptive Mesh Refinement For Shock Hydrodynamics: BergerDocument21 pagesLocal Adaptive Mesh Refinement For Shock Hydrodynamics: BergeryeibiNo ratings yet
- Geometrically guided exemplar-based inpainting reconstructs missing image partsDocument37 pagesGeometrically guided exemplar-based inpainting reconstructs missing image partsBilius LauraNo ratings yet
- Ding-Shu (JCP 2005)Document24 pagesDing-Shu (JCP 2005)Hamid MojiryNo ratings yet
- Multigrid methods for isogeometric discretizationDocument13 pagesMultigrid methods for isogeometric discretizationtomar_skNo ratings yet
- Computers & Fluids: Hua Ji, Fue-Sang Lien, Eugene YeeDocument17 pagesComputers & Fluids: Hua Ji, Fue-Sang Lien, Eugene YeeKay WhiteNo ratings yet
- Computer-Aided Design: David Gunderman, Kenneth Weiss, John A. EvansDocument14 pagesComputer-Aided Design: David Gunderman, Kenneth Weiss, John A. Evansanurag bhattacharyaNo ratings yet
- GPU-Accelerated 3D Mesh Deformation For Optimization Based On The Finite Element MethodDocument6 pagesGPU-Accelerated 3D Mesh Deformation For Optimization Based On The Finite Element MethodTanmay JainNo ratings yet
- Steepest Descent Algorithms For Optimization Under Unitary Matrix Constraint PDFDocument14 pagesSteepest Descent Algorithms For Optimization Under Unitary Matrix Constraint PDFAMISHI VIJAY VIJAYNo ratings yet
- Shakibajahromi RIMeshGNN A Rotation-Invariant Graph Neural Network For Mesh Classification WACV 2024 PaperDocument11 pagesShakibajahromi RIMeshGNN A Rotation-Invariant Graph Neural Network For Mesh Classification WACV 2024 Paperzammadali00No ratings yet
- Comput. Methods Appl. Mech. Engrg.: H. Nguyen-Xuan, G.R. Liu, C. Thai-Hoang, T. Nguyen-ThoiDocument19 pagesComput. Methods Appl. Mech. Engrg.: H. Nguyen-Xuan, G.R. Liu, C. Thai-Hoang, T. Nguyen-ThoiAhmed MabroukNo ratings yet
- The Bandwidths of A Matrix. A Survey of AlgorithmsDocument41 pagesThe Bandwidths of A Matrix. A Survey of AlgorithmsmartrantNo ratings yet
- An Adaptive Finite Volume Method For Incompressible Heat Flow Problems in SolidificationDocument34 pagesAn Adaptive Finite Volume Method For Incompressible Heat Flow Problems in Solidificationatme2009No ratings yet
- Constrained Fitting of B-Spline Curves Based Onthe Force Density MethodDocument7 pagesConstrained Fitting of B-Spline Curves Based Onthe Force Density MethodBobNo ratings yet
- HardemanDocument5 pagesHardemanAgung Satria WarmanNo ratings yet
- Optimized Compressed Sensing Via Incoherent Frames Designed by Convex OptimizationDocument23 pagesOptimized Compressed Sensing Via Incoherent Frames Designed by Convex OptimizationZorba ZorbaNo ratings yet
- Adjoint Rans With Filtered Shape Derivatives For Hydrodynamic OptimisationDocument11 pagesAdjoint Rans With Filtered Shape Derivatives For Hydrodynamic Optimisationvolo87No ratings yet
- An Isogeometric Design-Through-Analysis PDFDocument60 pagesAn Isogeometric Design-Through-Analysis PDFficuniNo ratings yet
- Bordas PhuDocument42 pagesBordas PhuTg DgNo ratings yet
- Unstructured Grid Generation and A Simple Triangulation Algorithm For Arbitrary 2-D Geometries Using Object Oriented ProgrammingDocument18 pagesUnstructured Grid Generation and A Simple Triangulation Algorithm For Arbitrary 2-D Geometries Using Object Oriented ProgrammingLata DeshmukhNo ratings yet
- Unstructured Mesh Generation Including Directional Renement For Aerodynamic Flow SimulationDocument14 pagesUnstructured Mesh Generation Including Directional Renement For Aerodynamic Flow SimulationManu ChakkingalNo ratings yet
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocument13 pagesAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNo ratings yet
- Bouclier Elguedj Combescure CM 2014Document28 pagesBouclier Elguedj Combescure CM 2014carhess kNo ratings yet
- Gu Et Al. 2017. Analysis of Three-Dimensional Anisotropic Heat Conduction Problems On Thin Domains Using An Advanced Boundary Element MethodDocument12 pagesGu Et Al. 2017. Analysis of Three-Dimensional Anisotropic Heat Conduction Problems On Thin Domains Using An Advanced Boundary Element MethodLeonardo BernardoNo ratings yet
- Hadsell Chopra Lecun 06 PDFDocument8 pagesHadsell Chopra Lecun 06 PDFLuis Favio Sanchez RafailoNo ratings yet
- Numerical Methodology of Mesh-Based Simulation TechniqueDocument5 pagesNumerical Methodology of Mesh-Based Simulation TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Static Structural and Modal Analysis Using Isogeometric AnalysisDocument40 pagesStatic Structural and Modal Analysis Using Isogeometric AnalysisVASUDEV SINGH SENGARNo ratings yet
- Chan Wan2000Document30 pagesChan Wan2000asdfghjklNo ratings yet
- 1 s2.0 S0168874X23000203 MainDocument16 pages1 s2.0 S0168874X23000203 MainMizan SalimNo ratings yet
- Isogeometric Analysis of Shear Bands PDFDocument19 pagesIsogeometric Analysis of Shear Bands PDFficuniNo ratings yet
- Nguyen-Xuan2014 Article UpperBoundLimitAnalysisOfPlateDocument29 pagesNguyen-Xuan2014 Article UpperBoundLimitAnalysisOfPlateficuniNo ratings yet
- A Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionDocument22 pagesA Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionbradjenoNo ratings yet
- 197601-Article Text-497670-1-10-20200716Document12 pages197601-Article Text-497670-1-10-20200716Khurram ShehzadNo ratings yet
- Multigrid Solvers For Immersed Finite Element Methods and Immersed Isogeometric AnalysisDocument32 pagesMultigrid Solvers For Immersed Finite Element Methods and Immersed Isogeometric AnalysisJorge Luis Garcia ZuñigaNo ratings yet
- Exact Distance Computation For DeformablDocument8 pagesExact Distance Computation For DeformablSachin GNo ratings yet
- (Journal of Theoretical and Applied Mechanics) Static Structural and Modal Analysis Using Isogeometric AnalysisDocument40 pages(Journal of Theoretical and Applied Mechanics) Static Structural and Modal Analysis Using Isogeometric AnalysisjmorlierNo ratings yet
- 02 Hanging Nodes and XFEMDocument33 pages02 Hanging Nodes and XFEMHaiNo ratings yet
- Fast Formation of Isogeometric Galerkin Matrices by Weighted QuadratureDocument31 pagesFast Formation of Isogeometric Galerkin Matrices by Weighted QuadratureJorge Luis Garcia ZuñigaNo ratings yet
- Applying Knowledge To Reverse Engineering Problems: Robert B. FisherDocument10 pagesApplying Knowledge To Reverse Engineering Problems: Robert B. Fisherparveenrathee123No ratings yet
- Computers and Mathematics With Applications: D. Mierke, C.F. Janßen, T. RungDocument22 pagesComputers and Mathematics With Applications: D. Mierke, C.F. Janßen, T. RungAT8iNo ratings yet
- CMP-220 - Rev1Document4 pagesCMP-220 - Rev1Holdolf BetrixNo ratings yet
- IDS705 Final ReportDocument27 pagesIDS705 Final ReportSaransh JainNo ratings yet
- Data Structures and Algorithms Course SyllabusDocument2 pagesData Structures and Algorithms Course Syllabusnetgalaxy2010No ratings yet
- DBSCAN Density-Based Clustering GuideDocument14 pagesDBSCAN Density-Based Clustering GuideamjadNo ratings yet
- Latin Square and Related Designs: 30.1 Basic ElementsDocument13 pagesLatin Square and Related Designs: 30.1 Basic ElementsJavier MendozaNo ratings yet
- BITS F312 HandoutDocument2 pagesBITS F312 HandoutPranath ReddyNo ratings yet
- Data Structure and Algorithm: Sorted Doubly Link List Presented by Prabal Kumar Sahu Asst. Prof., IT Dept., BCRECDocument14 pagesData Structure and Algorithm: Sorted Doubly Link List Presented by Prabal Kumar Sahu Asst. Prof., IT Dept., BCRECA8A TechNo ratings yet
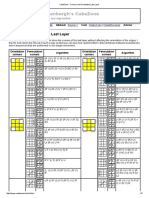
- CubeZone - Corners and Orientation Last LayerDocument2 pagesCubeZone - Corners and Orientation Last Layerjose ayarquispeNo ratings yet
- Kalman ReportDocument24 pagesKalman Reportsameerfarooq420840No ratings yet
- Optimization Models (Giuseppe C. Calafiore, Laurent El Ghaoui) (Z-Library)Document648 pagesOptimization Models (Giuseppe C. Calafiore, Laurent El Ghaoui) (Z-Library)kingtrueoneNo ratings yet
- Thesis Report On Image Steganography Using Wavelet TransformDocument39 pagesThesis Report On Image Steganography Using Wavelet TransformAdarsh Sharma100% (1)
- Median FilteringDocument30 pagesMedian FilteringK.R.RaguramNo ratings yet
- Networked Control SystemsDocument2 pagesNetworked Control SystemsWalid AlFuhaidNo ratings yet
- Cronbach's α (Reliability of data) and Factor Analysis (Construct Validity)Document55 pagesCronbach's α (Reliability of data) and Factor Analysis (Construct Validity)Sabha PathyNo ratings yet
- Design of A PID Controller For Disk Drive SystemDocument24 pagesDesign of A PID Controller For Disk Drive SystemshuvrabanikNo ratings yet
- (AS/RS) Are Storage Systems Capable of Providing Random Access To All Stored ItemsDocument8 pages(AS/RS) Are Storage Systems Capable of Providing Random Access To All Stored ItemsSrinivasan SridharanNo ratings yet
- Solve Literal EquationsDocument6 pagesSolve Literal Equationskim taehyungNo ratings yet
- Confusion MatrixDocument6 pagesConfusion MatrixamirNo ratings yet
- Learning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007Document31 pagesLearning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007paku deyNo ratings yet
- Simkom-Materi Week 5 - Random-Number & Random-Variate GenerationDocument24 pagesSimkom-Materi Week 5 - Random-Number & Random-Variate GenerationAnisa ShyafitryNo ratings yet
- Fault Tolerance in An Infant IncubatorDocument4 pagesFault Tolerance in An Infant IncubatorSubhashini jayaseelanNo ratings yet
- Heart Disease Prediction Using Classification Techniques in Machine LearningDocument4 pagesHeart Disease Prediction Using Classification Techniques in Machine LearningRony sahaNo ratings yet
- Gradient Descent Learns One-Hidden-Layer CNN: Don't Be Afraid of Spurious Local MinimaDocument24 pagesGradient Descent Learns One-Hidden-Layer CNN: Don't Be Afraid of Spurious Local MinimaDipayan BhadraNo ratings yet
- Sage and Scribe Systems of EquationsDocument2 pagesSage and Scribe Systems of Equationsapi-276032836No ratings yet
- Data MiningDocument27 pagesData Miningbekar1012No ratings yet
- Tripoli University Department of Electrical & Electronic EngineeringDocument44 pagesTripoli University Department of Electrical & Electronic EngineeringtojogofirNo ratings yet