You might also like
- Same Virtus: Alarm ListDocument23 pagesSame Virtus: Alarm ListLacatusu Mircea100% (1)
- Meshed vs. Radial MV Distribution Network in Presence of Large Amount of DGDocument6 pagesMeshed vs. Radial MV Distribution Network in Presence of Large Amount of DGAhmed WestministerNo ratings yet
- Excel NotesDocument9 pagesExcel NotesAhnNo ratings yet
- On-Line Building Energy Optimization Using Deep Reinforcement LearningDocument11 pagesOn-Line Building Energy Optimization Using Deep Reinforcement LearningalirezaNo ratings yet
- Active Distribution Network Integrated Planning Incorporating Distributed Generation and Load Response UncertaintiesDocument9 pagesActive Distribution Network Integrated Planning Incorporating Distributed Generation and Load Response Uncertaintiesvarathan.g2022No ratings yet
- State-of-the-Art Techniques and Challenges Ahead For Distributed Generation Planning and OptimizationDocument10 pagesState-of-the-Art Techniques and Challenges Ahead For Distributed Generation Planning and OptimizationAhmed WestministerNo ratings yet
- A State-Space Approach To Modelling DC Distribution SystemsDocument8 pagesA State-Space Approach To Modelling DC Distribution SystemsmedbNo ratings yet
- Optimal Partitioning of Smart Distribution Systems Into Supply-Sufficient MicrogridsDocument10 pagesOptimal Partitioning of Smart Distribution Systems Into Supply-Sufficient MicrogridsSarib MalikNo ratings yet
- White Paper - Evolving The Distribution Network To Deliver Reliability Into The FutureDocument5 pagesWhite Paper - Evolving The Distribution Network To Deliver Reliability Into The FutureLasith De SilvaNo ratings yet
- Expanding Transmission To Accelerate Asia's Renewable IntegrationDocument6 pagesExpanding Transmission To Accelerate Asia's Renewable Integrationnurhijjah.mahyudinNo ratings yet
- An Adaptive Robust Optimization Model For Power Systems Planning With Operational UncertaintyDocument11 pagesAn Adaptive Robust Optimization Model For Power Systems Planning With Operational UncertaintymauricioayoNo ratings yet
- Electric Power Systems Research: M. Armendáriz, K. Paridari, E. Wallin, L. NordströmDocument10 pagesElectric Power Systems Research: M. Armendáriz, K. Paridari, E. Wallin, L. NordströmImanTaheriNo ratings yet
- Deep RL For PlanificationDocument9 pagesDeep RL For Planificationgiorgi gamkrelidzeNo ratings yet
- J Adhoc 2018 05 008Document16 pagesJ Adhoc 2018 05 008Chakri ChakradharNo ratings yet
- Amiri & Mirazizi, 2017Document11 pagesAmiri & Mirazizi, 2017hannah.esparagosaNo ratings yet
- (2017) - Shafiullah - A Review On Distribution Grid Fault Location TechniquesDocument19 pages(2017) - Shafiullah - A Review On Distribution Grid Fault Location TechniquesJamile_P_NNo ratings yet
- Sensors: Openadr and Agreement Audit Architecture For A Complete Cycle of A Flexibility SolutionDocument21 pagesSensors: Openadr and Agreement Audit Architecture For A Complete Cycle of A Flexibility SolutionVicente MatamorosNo ratings yet
- Distributed Demand Side Management With Stochastic Wind Power ForecastingDocument16 pagesDistributed Demand Side Management With Stochastic Wind Power ForecastingMuhammad Saqib AliNo ratings yet
- IET Generation Trans Dist - 2023 - Tofighi Milani - Distributed Reactive Power Management in Multi Agent Energy SystemsDocument17 pagesIET Generation Trans Dist - 2023 - Tofighi Milani - Distributed Reactive Power Management in Multi Agent Energy Systemsharshdeepbaby4No ratings yet
- WB Note On Smart MeteringDocument12 pagesWB Note On Smart MeteringSudip DuttaNo ratings yet
- Using AC Optimal Power Flow For DG Planning and OptimisationDocument7 pagesUsing AC Optimal Power Flow For DG Planning and OptimisationAhmed WestministerNo ratings yet
- Algorithms 14 00240Document14 pagesAlgorithms 14 00240SuyashPratapNo ratings yet
- Ain Shams Engineering Journal: Oscar Danilo Montoya, Walter Gil-González, L.F. Grisales-NoreñaDocument10 pagesAin Shams Engineering Journal: Oscar Danilo Montoya, Walter Gil-González, L.F. Grisales-NoreñaDANIEL JULIAN NIVIA TORRESNo ratings yet
- Review: Methods For Relay CoordinationDocument6 pagesReview: Methods For Relay CoordinationWirangga Septiano PutraNo ratings yet
- Desarrollo SustentableDocument18 pagesDesarrollo Sustentablejuan manuelNo ratings yet
- User-Centric Resource Scheduling For Dual-Connectivity CommunicationsDocument5 pagesUser-Centric Resource Scheduling For Dual-Connectivity CommunicationsMinou LuchianoNo ratings yet
- Table 1 Classification and Assessment of The Different EnergyDocument2 pagesTable 1 Classification and Assessment of The Different EnergyMs R Latha ECENo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- Advanced Reliability Analysis For Distribution NetworkDocument6 pagesAdvanced Reliability Analysis For Distribution Networkapi-3697505No ratings yet
- Zhan 2020Document17 pagesZhan 2020ac.castro18No ratings yet
- Distributed Demand Side Management With Stochastic Wind Power ForecastingDocument16 pagesDistributed Demand Side Management With Stochastic Wind Power Forecasting忈奇緣No ratings yet
- 3 A Review of Power System Modelling Platforms and CapabilitiesDocument13 pages3 A Review of Power System Modelling Platforms and CapabilitiesArjun SECINo ratings yet
- ADMS Guide - 2 11.2015 PDFDocument33 pagesADMS Guide - 2 11.2015 PDFBharat RajNo ratings yet
- Self TuningDocument13 pagesSelf TuningLêninho CarvalhoNo ratings yet
- Transmission System Planning Considering Solar Distributed Generation PenetrationDocument6 pagesTransmission System Planning Considering Solar Distributed Generation PenetrationJoelson PaixãoNo ratings yet
- Energy Hubs For The FutureDocument7 pagesEnergy Hubs For The FutureJOSE DANIEL SANTACRUZ LONDONONo ratings yet
- Delivering A Highly Distributed Electricity System Technical - 2018 - Energy PDocument13 pagesDelivering A Highly Distributed Electricity System Technical - 2018 - Energy Pmaier wernerNo ratings yet
- A Survey of Modelling and Smart Management Tools For Power Grids With Prolific Distributed GenerationDocument26 pagesA Survey of Modelling and Smart Management Tools For Power Grids With Prolific Distributed GenerationFrancisco Font BellNo ratings yet
- Smart Grid Sensors - Improving Reliability For Distribution Grids During Energy Transition and Grid ModernizationDocument12 pagesSmart Grid Sensors - Improving Reliability For Distribution Grids During Energy Transition and Grid ModernizationSabri GünaydınNo ratings yet
- A Review On Optimal Placement of Distributed Generators For Reliability Improvement On Distribution NetworkDocument5 pagesA Review On Optimal Placement of Distributed Generators For Reliability Improvement On Distribution Networknikzadalireza77.anNo ratings yet
- Artificial Intelligence Algorithms For Power Allocation in High Throughput Satellites A ComparisonDocument15 pagesArtificial Intelligence Algorithms For Power Allocation in High Throughput Satellites A ComparisonWhiteRiverNo ratings yet
- INOC 2019 Paper 23Document5 pagesINOC 2019 Paper 23abel alejandro gonzález rodríguezNo ratings yet
- CIRED2011 0405 FinalDocument4 pagesCIRED2011 0405 FinalkotiniNo ratings yet
- Risk-Based Management of Transmission Lines Enhanced With The Dynamic Thermal Rating SystemDocument12 pagesRisk-Based Management of Transmission Lines Enhanced With The Dynamic Thermal Rating SystemDanielHuertasZarateNo ratings yet
- Paper Gestion de Activos ElectricosDocument7 pagesPaper Gestion de Activos ElectricosAntonio Olmedo AvalosNo ratings yet
- 30-Smart Grid Simulations and Their Supporting Implementation MethodsDocument24 pages30-Smart Grid Simulations and Their Supporting Implementation MethodsZyad GhaziNo ratings yet
- A Useful Power Open Market Solution For Power Investment Strategies Using The IEEE 30 Bus SystemDocument6 pagesA Useful Power Open Market Solution For Power Investment Strategies Using The IEEE 30 Bus Systemyafei maNo ratings yet
- D1-1 JC 1 Context-Setting FINALDocument12 pagesD1-1 JC 1 Context-Setting FINALTrầnViếtThànhNo ratings yet
- Challenges in Integrating Distributed Energy Storage Systems Into Future Smart GridDocument6 pagesChallenges in Integrating Distributed Energy Storage Systems Into Future Smart GridAlif Imran MohamedNo ratings yet
- Em Brochure The Power To Make Power HappenDocument20 pagesEm Brochure The Power To Make Power Happenk.nidharaNo ratings yet
- Tarokh PowerDocument6 pagesTarokh PowershayanshayanNo ratings yet
- 11 - 2023 - The Impact of Detailed Distribution System Representation in Dynamic Sub-Transmission-Distribution Co-SimulationDocument13 pages11 - 2023 - The Impact of Detailed Distribution System Representation in Dynamic Sub-Transmission-Distribution Co-SimulationAdam AlivinoNo ratings yet
- Roca Bert 2012Document16 pagesRoca Bert 2012kalokosNo ratings yet
- Probabilistic Assessment of Power SystemsDocument23 pagesProbabilistic Assessment of Power SystemsedrevolloNo ratings yet
- Communication Modeling of Solar Home System and Smart Meter in Smart GridsDocument12 pagesCommunication Modeling of Solar Home System and Smart Meter in Smart GridsDhivya BNo ratings yet
- Opportunities and Challenges in OFDMA-Based Cellular Relay Networks: A Radio Resource Management PerspectiveDocument15 pagesOpportunities and Challenges in OFDMA-Based Cellular Relay Networks: A Radio Resource Management PerspectiveOss OssNo ratings yet
- Distribution Network ReinforcementDocument6 pagesDistribution Network ReinforcementDan SloboNo ratings yet
- Transactive Energy Techniques Closing The Gap Between Wholesale and Retail Markets PDFDocument7 pagesTransactive Energy Techniques Closing The Gap Between Wholesale and Retail Markets PDFMichelle Maceas HenaoNo ratings yet
- Optimal ESS Allocation and Load Shedding For Improving Distribution System ReliabilityDocument11 pagesOptimal ESS Allocation and Load Shedding For Improving Distribution System ReliabilityJesus Ortiz LNo ratings yet
- A Two-Stage Scheduler of Distributed Energy ResourcesDocument6 pagesA Two-Stage Scheduler of Distributed Energy ResourcesVemalaiah KasiNo ratings yet
- Materi 1 PDFDocument7 pagesMateri 1 PDFWilldan Aprizal ArifinNo ratings yet
- Degree of ComparisonDocument23 pagesDegree of Comparisonesalisa23No ratings yet
- Nuclear Fusion EnergyDocument3 pagesNuclear Fusion EnergyAner Labaka UgarteNo ratings yet
- Chapter 16 - Oral Radiography (Essentials of Dental Assisting)Document96 pagesChapter 16 - Oral Radiography (Essentials of Dental Assisting)mussanteNo ratings yet
- Steam Turbine ProtectionDocument5 pagesSteam Turbine ProtectionRajesh P100% (1)
- CHM170L Exp3 Surface TensionDocument5 pagesCHM170L Exp3 Surface TensionKaiser SaltoNo ratings yet
- M. Fatur - H1C018040 - PETROLOGIDocument15 pagesM. Fatur - H1C018040 - PETROLOGIFaturrachmanNo ratings yet
- DCM-I&II Lab Equipments ListDocument2 pagesDCM-I&II Lab Equipments ListPrashant ChinamalliNo ratings yet
- 02 WholeDocument344 pages02 WholeedithgclemonsNo ratings yet
- Orthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Document30 pagesOrthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Uma MageshwariNo ratings yet
- Flexenclosure Esite Brochure PDFDocument5 pagesFlexenclosure Esite Brochure PDFajdCruiseNo ratings yet
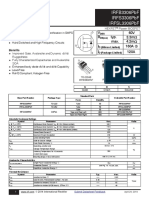
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet
- 3PAR DISK MatrixDocument6 pages3PAR DISK MatrixShaun PhelpsNo ratings yet
- Satisfaction and Revisit Intentions at Fast Food RestaurantsDocument12 pagesSatisfaction and Revisit Intentions at Fast Food RestaurantsKunal LodhiNo ratings yet
- 10 2Document26 pages10 2cristinatubleNo ratings yet
- Chap005 3Document26 pagesChap005 3Anass BNo ratings yet
- SkyCiv Beam - Hand Calculations - AJW8CTBuLE8YKrkKaG8KTtPAw8k74LSYDocument13 pagesSkyCiv Beam - Hand Calculations - AJW8CTBuLE8YKrkKaG8KTtPAw8k74LSYsaad rajawiNo ratings yet
- Microprocessor I - Lecture 01Document27 pagesMicroprocessor I - Lecture 01Omar Mohamed Farag Abd El FattahNo ratings yet
- Narayana Xii Pass Ir Iit (2023 24) PDFDocument16 pagesNarayana Xii Pass Ir Iit (2023 24) PDFRaghav ChaudharyNo ratings yet
- Types of Solids 1Document16 pagesTypes of Solids 1Fern BaldonazaNo ratings yet
- Entropy and The Second Law of Thermodynamics Disorder and The Unavailability of Energy 6Document14 pagesEntropy and The Second Law of Thermodynamics Disorder and The Unavailability of Energy 6HarishChoudharyNo ratings yet
- Creating Attachments To Work Items or To User Decisions in WorkflowsDocument20 pagesCreating Attachments To Work Items or To User Decisions in Workflowselampe100% (1)
- Q2. Give An Example of Each A. Stochastic Model B. Continuous Model C. Discrete Model D. Static Model E. Dynamic ModelDocument2 pagesQ2. Give An Example of Each A. Stochastic Model B. Continuous Model C. Discrete Model D. Static Model E. Dynamic Modelsheena RomNo ratings yet
- Engine Control System Circuit Diagram: Without This Message by Purchasing NovapdfDocument3 pagesEngine Control System Circuit Diagram: Without This Message by Purchasing NovapdfJose Luis Gutierrez TamayoNo ratings yet
- Oculus SDK OverviewDocument47 pagesOculus SDK OverviewparaqueimaNo ratings yet
- JNJNKDocument11 pagesJNJNKjatin gargNo ratings yet
- Analysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareDocument12 pagesAnalysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareEditor IJTSRDNo ratings yet
- 5ROS Underslung BSaverTROUGHS25Document1 page5ROS Underslung BSaverTROUGHS25jonodo89No ratings yet
- Chapter 3Document23 pagesChapter 3pganoelNo ratings yet