You might also like
- How To Hack Android Using Kali (Remotely) : Step 1: Fire-Up KaliDocument4 pagesHow To Hack Android Using Kali (Remotely) : Step 1: Fire-Up Kalimuugii_1983100% (3)
- A Novel Intrusion Detection System For Vehicular Ad Hoc Networks (VANETs) Based On Differences of Traffic Flow and PositionDocument39 pagesA Novel Intrusion Detection System For Vehicular Ad Hoc Networks (VANETs) Based On Differences of Traffic Flow and PositionslimaneNo ratings yet
- Intelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsFrom EverandIntelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsRating: 1 out of 5 stars1/5 (1)
- 3.0 Java Programming Tutorial OOP Exercises 3.4 Understanding Objects PDFDocument61 pages3.0 Java Programming Tutorial OOP Exercises 3.4 Understanding Objects PDFVăn QuyếnNo ratings yet
- V2X-Vit: Vehicle-To-Everything Cooperative Perception With Vision TransformerDocument31 pagesV2X-Vit: Vehicle-To-Everything Cooperative Perception With Vision TransformerMohanKrishnaNo ratings yet
- Interruption-Aware Cooperative Perception For V2X Communication-Aided Autonomous DrivingDocument15 pagesInterruption-Aware Cooperative Perception For V2X Communication-Aided Autonomous Drivingمصعب جاسمNo ratings yet
- Selecting Heavy Vehicles and Their Benefits in Vanet: Ankita Dixit, Shweta Singh, Kushal GuptaDocument4 pagesSelecting Heavy Vehicles and Their Benefits in Vanet: Ankita Dixit, Shweta Singh, Kushal GuptaerpublicationNo ratings yet
- Learn To Compress CSI and Allocate Resources in VeDocument14 pagesLearn To Compress CSI and Allocate Resources in VeeverlovingmansiNo ratings yet
- Wa0001.Document6 pagesWa0001.Christy BinuNo ratings yet
- V2X 22ecm3r20Document2 pagesV2X 22ecm3r20Rubel HalderNo ratings yet
- (Paperhub - Ir) 10.1109 Tits.2018.2865173Document13 pages(Paperhub - Ir) 10.1109 Tits.2018.2865173mohammad kazemiNo ratings yet
- Low Cost GPS LocationsDocument6 pagesLow Cost GPS Locationseko_suwarsono100% (1)
- V2Vnet: Vehicle-To-Vehicle Communication For Joint Perception and PredictionDocument17 pagesV2Vnet: Vehicle-To-Vehicle Communication For Joint Perception and Predictionaleposada7No ratings yet
- Research Article: STEIM: A Spatiotemporal Event Interaction Model in V2X Systems Based On A Time Period and A Raster MapDocument20 pagesResearch Article: STEIM: A Spatiotemporal Event Interaction Model in V2X Systems Based On A Time Period and A Raster Mapمصعب جاسمNo ratings yet
- Cooperative Autonomous Driving Oriented MEC-Aided 5G-V2X: Prototype System Design, Field Tests and AI-Based Optimization ToolsDocument15 pagesCooperative Autonomous Driving Oriented MEC-Aided 5G-V2X: Prototype System Design, Field Tests and AI-Based Optimization Toolsz2412952949No ratings yet
- Challenges and Solutions For Cellular Based V2X CommunicationsDocument34 pagesChallenges and Solutions For Cellular Based V2X CommunicationsSameer SinghNo ratings yet
- Spectrum Sharing in Vehicular Networks Based On MuDocument11 pagesSpectrum Sharing in Vehicular Networks Based On MueverlovingmansiNo ratings yet
- Remotesensing 13 00089 v2Document23 pagesRemotesensing 13 00089 v2Varun GoradiaNo ratings yet
- Equinox: A Road-Side Edge Computing Experimental Platform For CavsDocument2 pagesEquinox: A Road-Side Edge Computing Experimental Platform For CavsWilson IriarteNo ratings yet
- V2X Communication Protocol in VANET For Co-Operative Intelligent Transportation SystemDocument6 pagesV2X Communication Protocol in VANET For Co-Operative Intelligent Transportation SystemmraabsNo ratings yet
- Securing Vehicle-To-Everything V2X Communication PlatformsDocument21 pagesSecuring Vehicle-To-Everything V2X Communication Platformsmayank kumarNo ratings yet
- Sensors 22 00686Document15 pagesSensors 22 00686Lemuel AraujoNo ratings yet
- The Car-Following Model and Its Applications in The V2X Environment: A Historical ReviewDocument34 pagesThe Car-Following Model and Its Applications in The V2X Environment: A Historical ReviewRamkali KushwahaNo ratings yet
- Channel Characterization For Vehicle-to-Infrastructure Communications in Millimeter-Wave BandDocument17 pagesChannel Characterization For Vehicle-to-Infrastructure Communications in Millimeter-Wave BandAbdo ElmessiouiNo ratings yet
- Learn To Allocate Resources in Vehicular NetworksDocument7 pagesLearn To Allocate Resources in Vehicular NetworkseverlovingmansiNo ratings yet
- 1 s2.0 S2214209622000237 MainDocument45 pages1 s2.0 S2214209622000237 Mainz2412952949No ratings yet
- Securing Vehicle-to-Everything (V2X) Communication PlatformsDocument21 pagesSecuring Vehicle-to-Everything (V2X) Communication PlatformsTEJAS B NNo ratings yet
- Edgenext Efficiently Amalgamated Cnn-Transformer Architecture For Mobile Vision ApplicationsDocument10 pagesEdgenext Efficiently Amalgamated Cnn-Transformer Architecture For Mobile Vision Applications王大哥No ratings yet
- Sensors 21 00843Document14 pagesSensors 21 00843SafaNo ratings yet
- 1 s2.0 S1389128618306157 MainDocument16 pages1 s2.0 S1389128618306157 Maindayoladejo777No ratings yet
- A Hybrid Model To Extend VehicularDocument6 pagesA Hybrid Model To Extend VehicularNicolas Mora RestrepoNo ratings yet
- DeVANET - Decentralized Software-Defined VANET ArchitectureDocument6 pagesDeVANET - Decentralized Software-Defined VANET ArchitectureDavidNo ratings yet
- 134 139, Tesma507, IJEASTDocument6 pages134 139, Tesma507, IJEASTRishan KundetyNo ratings yet
- VehicularAd HocNetworksVANETs AnOverviewandChallengesDocument11 pagesVehicularAd HocNetworksVANETs AnOverviewandChallengesGolugula Madhu SatishNo ratings yet
- On Unified Vehicular Communications and Radar Sensing in Millimeter-Wave and Low Terahertz BandsDocument8 pagesOn Unified Vehicular Communications and Radar Sensing in Millimeter-Wave and Low Terahertz Bandsghghg bhbbhbhNo ratings yet
- Vehicular NetworkingDocument5 pagesVehicular NetworkingEditor IJTSRDNo ratings yet
- Radar Target Simulation For Vehicle-in-the-Loop TestingDocument15 pagesRadar Target Simulation For Vehicle-in-the-Loop TestingmakkieNo ratings yet
- Vehicular Ad-Hoc Networks (Vanets) - An Overview and ChallengesDocument11 pagesVehicular Ad-Hoc Networks (Vanets) - An Overview and ChallengesAlex RâpanuNo ratings yet
- Autonomous Driving A Survey of Technological Gaps Using Google Scholar and Web of Science Trend AnalysisDocument18 pagesAutonomous Driving A Survey of Technological Gaps Using Google Scholar and Web of Science Trend AnalysisSaurav AgrawalNo ratings yet
- Vehicle-to-Everything (V2X) in 5GDocument3 pagesVehicle-to-Everything (V2X) in 5GHager AhmedNo ratings yet
- Ehhehehevevwv 2 XDocument21 pagesEhhehehevevwv 2 XgopizizouNo ratings yet
- Cloud-Centric and Logically Isolated Virtual Network Environment Based On Software-Defined Wide Area NetworkDocument15 pagesCloud-Centric and Logically Isolated Virtual Network Environment Based On Software-Defined Wide Area NetworkAravind PadmanabhanNo ratings yet
- Sensors 22 08941Document18 pagesSensors 22 08941wayne.nguyenNo ratings yet
- V2X Wireless Technology Identification Using Time-Frequency Analysis and Random Forest ClassifierDocument15 pagesV2X Wireless Technology Identification Using Time-Frequency Analysis and Random Forest ClassifierLys mNo ratings yet
- Security of SDN-based Vehicular Ad Hoc Networks: State-Of-The-Art and ChallengesDocument23 pagesSecurity of SDN-based Vehicular Ad Hoc Networks: State-Of-The-Art and ChallengesManivarmaNo ratings yet
- Geometry-Based Vehicle-to-Vehicle Channel Modeling For Large-Scale SimulationDocument18 pagesGeometry-Based Vehicle-to-Vehicle Channel Modeling For Large-Scale SimulationcakiNo ratings yet
- 2018 Arxiv Mou VehicleSegmentationDocument14 pages2018 Arxiv Mou VehicleSegmentationdakshNo ratings yet
- Security of 5G-V2X - Technologies, Standardization and Research DirectionsDocument9 pagesSecurity of 5G-V2X - Technologies, Standardization and Research DirectionsSafaNo ratings yet
- Graph-Based Radio Resource Management For Vehicular NetworksDocument7 pagesGraph-Based Radio Resource Management For Vehicular Networksmohammad kazemiNo ratings yet
- Velasco Hernandez2020Document7 pagesVelasco Hernandez2020rahul rNo ratings yet
- Detection and Prevention of Worm Hole Attack To Improve Traffic in VANETDocument13 pagesDetection and Prevention of Worm Hole Attack To Improve Traffic in VANETIJRASETPublicationsNo ratings yet
- Can We Unify Monocular Detectors For Autonomous Driving by Using The Pixel-Wise Semantic Segmentation of CNNS?Document4 pagesCan We Unify Monocular Detectors For Autonomous Driving by Using The Pixel-Wise Semantic Segmentation of CNNS?Lidia LópezNo ratings yet
- Tang 2021 IOP Conf. Ser. Earth Environ. Sci. 804 022024Document11 pagesTang 2021 IOP Conf. Ser. Earth Environ. Sci. 804 022024CATIA BACKUPNo ratings yet
- Exploring Software Defined Networks For Seamless HandoversDocument11 pagesExploring Software Defined Networks For Seamless Handoversjainam lathiyaNo ratings yet
- Modular 1Document17 pagesModular 1x5midoxx01No ratings yet
- Futureinternet 15 00175Document32 pagesFutureinternet 15 00175Pekka KorhonenNo ratings yet
- A Deep Survey On Types of Cyber Attacks in VANETDocument12 pagesA Deep Survey On Types of Cyber Attacks in VANETslimaneNo ratings yet
- Al Mekhlafi, 2021Document14 pagesAl Mekhlafi, 2021Faisal AliNo ratings yet
- Vehicle To Vehicle V2V Communication Scope Importa PDFDocument13 pagesVehicle To Vehicle V2V Communication Scope Importa PDFvahidinkormanNo ratings yet
- Reference 59 2015 79Document14 pagesReference 59 2015 79Rajkumar JainNo ratings yet
- Onevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesDocument15 pagesOnevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesNguyễn DuyNo ratings yet
- Introduction to Mastering Modern Web Technologies with React.js and Ant DesignFrom EverandIntroduction to Mastering Modern Web Technologies with React.js and Ant DesignNo ratings yet
- Biostar g31d-m7 SpecDocument2 pagesBiostar g31d-m7 SpecManishkumar JethvaNo ratings yet
- PCCSE: Prisma Certified Cloud Security Engineer: Certification ObjectivesDocument1 pagePCCSE: Prisma Certified Cloud Security Engineer: Certification ObjectivesJohn LinNo ratings yet
- AirCheck G3 Wireless Analyzer Data SheetDocument10 pagesAirCheck G3 Wireless Analyzer Data SheetmanU85521No ratings yet
- Prac Win10 Nlbs10Document11 pagesPrac Win10 Nlbs10Christian MolinaNo ratings yet
- University of Canberra PHD ThesisDocument4 pagesUniversity of Canberra PHD Thesismaritzatysonconnecticut100% (2)
- Details of ProgrammesDocument98 pagesDetails of ProgrammesRAJESH L MEHTANo ratings yet
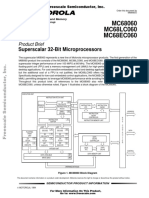
- MC68060 MC68LC060 MC68EC060: Superscalar 32-Bit MicroprocessorsDocument10 pagesMC68060 MC68LC060 MC68EC060: Superscalar 32-Bit MicroprocessorsPrzemysław WójcikNo ratings yet
- Compiler Design-UNIT-5Document34 pagesCompiler Design-UNIT-5nandanNo ratings yet
- Design For Test PDFDocument254 pagesDesign For Test PDFtsikboyNo ratings yet
- Predicting Profit of A Startup Companies Using Machine Learning AlgorithmsDocument5 pagesPredicting Profit of A Startup Companies Using Machine Learning AlgorithmsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Polymorphism: Real Life Example of PolymorphismDocument5 pagesPolymorphism: Real Life Example of PolymorphismDANCE MUJRA FUNNo ratings yet
- Na U4m11l01 PDFDocument10 pagesNa U4m11l01 PDFEzRarezNo ratings yet
- 1600Xp Series: Installation and Operation ManualDocument80 pages1600Xp Series: Installation and Operation ManualRodolfo RamirezNo ratings yet
- Chapter 4 FunctionsDocument24 pagesChapter 4 FunctionsKrystell Elaine AltezaNo ratings yet
- Troubleshooting and Repair Manual CM870 Electronic Control System Signature and ISX Volume 1 and 2 KitDocument83 pagesTroubleshooting and Repair Manual CM870 Electronic Control System Signature and ISX Volume 1 and 2 Kitcharlysf100% (1)
- 08 ReferencesDocument3 pages08 Referencesjoseph livingNo ratings yet
- 2.1.4.6 Packet Tracer - Navigating The IOSDocument3 pages2.1.4.6 Packet Tracer - Navigating The IOSNaveen Kumar Thadakamalla75% (4)
- Basic Logical OperatorsDocument41 pagesBasic Logical OperatorsCrizylen Mae Pepito LahoylahoyNo ratings yet
- Scribd-Dl PyPIDocument4 pagesScribd-Dl PyPIAhmed MohamedNo ratings yet
- Csol 540-Week 6 Solarwind Paper 1Document4 pagesCsol 540-Week 6 Solarwind Paper 1api-694098467No ratings yet
- Presenting To You The World's Largest Mystic Scripts LibraryDocument3 pagesPresenting To You The World's Largest Mystic Scripts Libraryraaj1963@hotmail.comNo ratings yet
- Advanced Automotive ElectronicDocument1 pageAdvanced Automotive ElectronicnoubyluxorNo ratings yet
- Agricultural ScienceSyllabus 2017 - Grade 12 Sinhala MediumDocument64 pagesAgricultural ScienceSyllabus 2017 - Grade 12 Sinhala MediumRrgs BandaraNo ratings yet
- Global S Site Prep ManualDocument76 pagesGlobal S Site Prep ManualRodrigo AntonioNo ratings yet
- Voice Recognition Door Lock: ECE 445 Second Design DocumentDocument24 pagesVoice Recognition Door Lock: ECE 445 Second Design DocumentCalvin ElijahNo ratings yet
- Modals Can-Can't Must-Mustn't WorksheetDocument3 pagesModals Can-Can't Must-Mustn't WorksheetLivia Cassemiro SampaioNo ratings yet
- Robotic Process AutomationDocument9 pagesRobotic Process AutomationĐức PhúNo ratings yet