You might also like
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- UIU EEE Lab Report on DFT using MATLABDocument9 pagesUIU EEE Lab Report on DFT using MATLABMushfiqul HoqueNo ratings yet
- Digital Communications: Courses and Exercises with SolutionsFrom EverandDigital Communications: Courses and Exercises with SolutionsRating: 3 out of 5 stars3/5 (2)
- DSP 2 MarksDocument20 pagesDSP 2 MarksSanthosh SandyNo ratings yet
- Artificial Neural Networks (The Tutorial With MATLAB)Document6 pagesArtificial Neural Networks (The Tutorial With MATLAB)DanielNo ratings yet
- RF SENSING ImpairmentsDocument6 pagesRF SENSING Impairmentsparientola90No ratings yet
- Teager Kaiser FilterDocument4 pagesTeager Kaiser FilterCristian CarrilloNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- Rakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Document6 pagesRakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Deepak SankhalaNo ratings yet
- Duffing Oscillator Application in Weak Signal DetectionDocument6 pagesDuffing Oscillator Application in Weak Signal DetectionMusketeer CamNo ratings yet
- Sac HiDocument5 pagesSac HiSamanway ChakrabortyNo ratings yet
- Quickest Spectrum Sensing in Cognitive RadioDocument6 pagesQuickest Spectrum Sensing in Cognitive Radionix121No ratings yet
- A Passive Radar System For Detecting UAV Based On The OFDM Communication SignalDocument6 pagesA Passive Radar System For Detecting UAV Based On The OFDM Communication SignalRiya BansalNo ratings yet
- B.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksDocument14 pagesB.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksSuresh KumarNo ratings yet
- DSP SlidesDocument261 pagesDSP SlidesJoel NietoNo ratings yet
- Performance of DCT Based Ofdm Communication SystemDocument6 pagesPerformance of DCT Based Ofdm Communication SystemEman farjallhNo ratings yet
- Digital Signal Processing Two MarksDocument11 pagesDigital Signal Processing Two MarksDelphin ShibinNo ratings yet
- Matlab Project IdeaDocument8 pagesMatlab Project IdeaSrivatson SridarNo ratings yet
- SCT Digital Signal Processing ItDocument26 pagesSCT Digital Signal Processing ItSakthiRJNo ratings yet
- Comparison of Two Novel List Sphere Detector Algorithms For Mimo-Ofdm SystemsDocument5 pagesComparison of Two Novel List Sphere Detector Algorithms For Mimo-Ofdm SystemsDomRuanNo ratings yet
- Research On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIADocument4 pagesResearch On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIAThuc VuNo ratings yet
- Transmission Line FaultDocument6 pagesTransmission Line FaultAbhinav ShendageNo ratings yet
- DSP Signals and SystemsDocument27 pagesDSP Signals and SystemsDevie MohanNo ratings yet
- Robustness of DS-CDMA Multiuser Detectors: Pål Orten and Tony OttossonDocument5 pagesRobustness of DS-CDMA Multiuser Detectors: Pål Orten and Tony OttossonEmraan ShaikhNo ratings yet
- DSP Important Questions Unit-WiseDocument6 pagesDSP Important Questions Unit-WiseRasool Reddy100% (4)
- Sparse Representations and Low-Rank Tensor ApproximationDocument19 pagesSparse Representations and Low-Rank Tensor ApproximationIsaiah SunNo ratings yet
- TC-212 DSPDocument43 pagesTC-212 DSPbakNo ratings yet
- Digital Signal Processing Course OverviewDocument2 pagesDigital Signal Processing Course OverviewAnonymous HyOfbJ60% (1)
- Digital Signal Processing: Markus KuhnDocument214 pagesDigital Signal Processing: Markus KuhnParbat RajpurohitNo ratings yet
- Discrete Haar TransformsDocument7 pagesDiscrete Haar TransformsPradosh K. RoyNo ratings yet
- Implementation of A Basic AECDocument4 pagesImplementation of A Basic AECquitelargeNo ratings yet
- TURCOMAT-Denoising of MST RADAR Signal Using CWT and Overlapping Group ShrinkageDocument5 pagesTURCOMAT-Denoising of MST RADAR Signal Using CWT and Overlapping Group ShrinkageSureshbabu PNo ratings yet
- Implementation of Cyclostationary Feature DetectorDocument4 pagesImplementation of Cyclostationary Feature Detectorkushal24No ratings yet
- Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesAcoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- Design and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesDesign and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- Identification of Fingerprint Using Discrete Wavelet Packet TransformDocument7 pagesIdentification of Fingerprint Using Discrete Wavelet Packet Transformcristian flore arreolaNo ratings yet
- An Improved Image Fusion Algorithm Based On Wavelet DecompositionDocument7 pagesAn Improved Image Fusion Algorithm Based On Wavelet DecompositionRakesh VermaNo ratings yet
- Electron MicroscopeDocument8 pagesElectron MicroscopeestherNo ratings yet
- Sensors: Noise Smoothing For Structural Vibration Test Signals Using An Improved Wavelet Thresholding TechniqueDocument16 pagesSensors: Noise Smoothing For Structural Vibration Test Signals Using An Improved Wavelet Thresholding TechniqueJyo ReddyNo ratings yet
- Matecconf Ijcaet-Isampe2018 02001Document6 pagesMatecconf Ijcaet-Isampe2018 02001erick morganNo ratings yet
- SlidesDocument216 pagesSlidesSu KoshNo ratings yet
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CsehariharankalyanNo ratings yet
- Single-Channel Electroencephalogram Analysis Using Non-Linear Subspace TechniquesDocument6 pagesSingle-Channel Electroencephalogram Analysis Using Non-Linear Subspace TechniquesIoana GuțăNo ratings yet
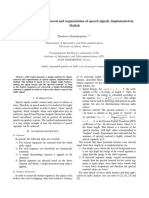
- Matlab method for speech signal silence removal and segmentationDocument3 pagesMatlab method for speech signal silence removal and segmentationJulsNo ratings yet
- Oerder Meyer PDFDocument8 pagesOerder Meyer PDFKarthik GowdaNo ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Doppler Spread Estimation in Mobile Communication SystemsDocument5 pagesDoppler Spread Estimation in Mobile Communication Systems82416149No ratings yet
- 1202 1552 PDFDocument16 pages1202 1552 PDFarpitmatlabNo ratings yet
- A Signal Theoretic Approach For Envelope Analysis of Real-Valued SignalsDocument9 pagesA Signal Theoretic Approach For Envelope Analysis of Real-Valued SignalsIsmael DlgNo ratings yet
- Virtual Harmonic Analyser in LabVIEWDocument6 pagesVirtual Harmonic Analyser in LabVIEWBiljana RisteskaNo ratings yet
- A List Sphere Detector Based On Dijkstra'S Algorithm For Mimo-Ofdm SystemsDocument5 pagesA List Sphere Detector Based On Dijkstra'S Algorithm For Mimo-Ofdm SystemsDomRuanNo ratings yet
- Slides 2upDocument104 pagesSlides 2upNikhil KawaleNo ratings yet
- Applied Sciences: Fault Diagnosis For A Bearing Rolling Element Using Improved VMD and HTDocument15 pagesApplied Sciences: Fault Diagnosis For A Bearing Rolling Element Using Improved VMD and HTSindhu KamathNo ratings yet
- Dy SPAN2010 KimDocument8 pagesDy SPAN2010 Kimzizo1921No ratings yet
- Ref 28Document6 pagesRef 28Mayssa RjaibiaNo ratings yet
- Ec2312 - Digital Signal Processing: Om SathiDocument22 pagesEc2312 - Digital Signal Processing: Om SathiSarojini MuthuNo ratings yet
- DSP LabDocument104 pagesDSP Labaara aNo ratings yet
- Lec13-18 - Fourier Series-Updated LectureDocument51 pagesLec13-18 - Fourier Series-Updated LectureDaniya AbbasiNo ratings yet
- Rapid Firing Scheme For Ultrasonic Sensors Used in Mobile RobotsDocument10 pagesRapid Firing Scheme For Ultrasonic Sensors Used in Mobile RobotsRavindra KumarNo ratings yet
- Outlook 2019 Basic Quick ReferenceDocument3 pagesOutlook 2019 Basic Quick ReferencemazzagraNo ratings yet
- SQL Server Installation Guide..Document8 pagesSQL Server Installation Guide..Haseeb ZahidNo ratings yet
- Computational Modeling of Prefrontal Cortex For Meta-Cognition of A Humanoid RobotDocument18 pagesComputational Modeling of Prefrontal Cortex For Meta-Cognition of A Humanoid RobotJadir Ibna HasanNo ratings yet
- Marvelmind Indoor Positioning Technologies ReviewDocument34 pagesMarvelmind Indoor Positioning Technologies ReviewRumah WayangNo ratings yet
- Contemporary Wo-WPS OfficeDocument2 pagesContemporary Wo-WPS Officekimiku saylonNo ratings yet
- LU 12 Digital Business Service Implementation, Optimisation & ChallengesDocument61 pagesLU 12 Digital Business Service Implementation, Optimisation & ChallengesLina Levvenia RatanamNo ratings yet
- Spline Standards and Spline Calculator: Software For The Design of SplinesDocument8 pagesSpline Standards and Spline Calculator: Software For The Design of Splinesmarcos jose fernandesNo ratings yet
- Indoor Cable Floor Heating Systems: Application ManualDocument52 pagesIndoor Cable Floor Heating Systems: Application ManualLucian CiudinNo ratings yet
- Curriculum Vitae AnishDocument2 pagesCurriculum Vitae AnishNSG ArghyaNo ratings yet
- WWW - Manaresults.co - In: MAY/JUNE-2023 Dcme - Fifth Semester Examination Board Diploma Examination, (C-20)Document3 pagesWWW - Manaresults.co - In: MAY/JUNE-2023 Dcme - Fifth Semester Examination Board Diploma Examination, (C-20)babudurga700No ratings yet
- All India Sainik Schools Entrance Examination 2022: Information BulletinDocument75 pagesAll India Sainik Schools Entrance Examination 2022: Information BulletinWilson ThomasNo ratings yet
- VIX As A PredictorInsightsDocument9 pagesVIX As A PredictorInsightsSandipNo ratings yet
- Activity 3.3 Thesis, Topic Sentence and Supporting Details-1Document3 pagesActivity 3.3 Thesis, Topic Sentence and Supporting Details-1Blanche Faith C. MARGATENo ratings yet
- Tobii Eye Tracker 5L ProductsheetDocument4 pagesTobii Eye Tracker 5L ProductsheetnaonedNo ratings yet
- Laporan Maulid NabiDocument81 pagesLaporan Maulid Nabidesnimar darmawanNo ratings yet
- Warnings Errors in ImdsDocument62 pagesWarnings Errors in ImdsJesús AlejandroNo ratings yet
- Smart Drip Irrigation System For Sustainable Agriculture: July 2016Document5 pagesSmart Drip Irrigation System For Sustainable Agriculture: July 2016Shoaib NadeemNo ratings yet
- Justify Your Training FOR500Document2 pagesJustify Your Training FOR500Mohan BharambeNo ratings yet
- COM3701-study Notes Oct 2015Document13 pagesCOM3701-study Notes Oct 2015Morena Leshabane0% (1)
- Software Requirements Engineering (SRE) FundamentalsDocument36 pagesSoftware Requirements Engineering (SRE) FundamentalsABDUL MOIZ HUSSAINNo ratings yet
- ABAP Program Tips by MundosapDocument168 pagesABAP Program Tips by MundosapOscar FrancoNo ratings yet
- Indumathi MINIIDocument15 pagesIndumathi MINIIKanan 2001No ratings yet
- Business Intelligence NotesDocument88 pagesBusiness Intelligence NotesManjit SinghNo ratings yet
- Cyber CrimeDocument44 pagesCyber CrimeAdnan Yusufzai95% (22)
- Vieta's Formulas Handout Answers and SolutionsDocument4 pagesVieta's Formulas Handout Answers and SolutionsWalker KroubalkianNo ratings yet
- 1521642669starting Online Business Course PDFDocument13 pages1521642669starting Online Business Course PDFkrishmasethiNo ratings yet
- 10 - Troubleshooting INSITE 6.4 OnDocument68 pages10 - Troubleshooting INSITE 6.4 OnagvassNo ratings yet
- Department Timetables for Computer Science FacultyDocument4 pagesDepartment Timetables for Computer Science FacultykirubaNo ratings yet
- Xamarin Mobile Application Development For Android - Second Edition - Sample ChapterDocument38 pagesXamarin Mobile Application Development For Android - Second Edition - Sample ChapterPackt PublishingNo ratings yet
- BioPro MH40 Data SheetDocument2 pagesBioPro MH40 Data SheetHdr SdyNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)