You might also like
- Gear Analysis1Document17 pagesGear Analysis1Nikola ČegecNo ratings yet
- 115 Landslide Hazard PDFDocument5 pages115 Landslide Hazard PDFong0625No ratings yet
- Case Laws IBBIDocument21 pagesCase Laws IBBIAbhinjoy PalNo ratings yet
- Motion For Forensic Examination - Cyber CasedocxDocument5 pagesMotion For Forensic Examination - Cyber CasedocxJazz Tracey100% (1)
- Traction Power Substation Load AnalysisDocument18 pagesTraction Power Substation Load AnalysisYusril Ainun100% (1)
- PDFs/Sprinker NFPA 13/plan Review Sprinkler Checklist 13Document5 pagesPDFs/Sprinker NFPA 13/plan Review Sprinkler Checklist 13isbtanwir100% (1)
- Tutorial EllothDocument15 pagesTutorial EllothLepota SvetaNo ratings yet
- Model of Triple Friction PendulumDocument382 pagesModel of Triple Friction Pendulumlaherrerac100% (2)
- Handling and Working With Analytical StandardsDocument6 pagesHandling and Working With Analytical StandardsPreuz100% (1)
- An Improved Particle Swarm Optimization AlgorithmDocument11 pagesAn Improved Particle Swarm Optimization AlgorithmOussama AkrmiNo ratings yet
- Mechanical Variable Magnetic Gear Transmission Concept and Preliminary ResearchDocument8 pagesMechanical Variable Magnetic Gear Transmission Concept and Preliminary ResearchnevesunipampaNo ratings yet
- Developmentanddynamicmodellingofaflexure Based PDFDocument22 pagesDevelopmentanddynamicmodellingofaflexure Based PDFDenise NelsonNo ratings yet
- Energies 11 02687Document17 pagesEnergies 11 02687Lucas ErburuNo ratings yet
- Study On Nonlinear Dynamics of Rigid-Flexible Coupling Multi-Link Mechanism Considering Various Kinds of ClearancesDocument28 pagesStudy On Nonlinear Dynamics of Rigid-Flexible Coupling Multi-Link Mechanism Considering Various Kinds of ClearancesThaiHuynhNgocNo ratings yet
- Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleDocument20 pagesFlux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleMt GolesNo ratings yet
- Stiffness of GearDocument14 pagesStiffness of GearShivkant SharmaNo ratings yet
- Article AMB First PNGDocument31 pagesArticle AMB First PNGFABIEN KENMOGNENo ratings yet
- Numerical and Experimental Design Optimization of Toggle Clamping MechanismDocument17 pagesNumerical and Experimental Design Optimization of Toggle Clamping MechanismGogyNo ratings yet
- Crane Transmission SystemDocument10 pagesCrane Transmission SystemRikkinNo ratings yet
- H Aa Madsen 2007 J. Phys. Conf. Ser. 75 012016Document12 pagesH Aa Madsen 2007 J. Phys. Conf. Ser. 75 012016cepheid_luNo ratings yet
- Applsci 12 07003 v3Document12 pagesApplsci 12 07003 v3avv81419No ratings yet
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocument7 pagesStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNo ratings yet
- Research ArticleDocument15 pagesResearch Articleramesh gondilNo ratings yet
- Mechanical Systems and Signal Processing: Yanling Tian, Bijan Shirinzadeh, Dawei Zhang, Gursel AliciDocument22 pagesMechanical Systems and Signal Processing: Yanling Tian, Bijan Shirinzadeh, Dawei Zhang, Gursel AliciNABIL HUSSAINNo ratings yet
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanNo ratings yet
- Failure and Prospects of Modification in A Belt Conveyor SystemDocument4 pagesFailure and Prospects of Modification in A Belt Conveyor SystemGogyNo ratings yet
- Engineering Science and Technology, An International JournalDocument7 pagesEngineering Science and Technology, An International Journaldiego peinadoNo ratings yet
- Analysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsDocument25 pagesAnalysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsESHETU SILESHINo ratings yet
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoNo ratings yet
- DimensionnementDocument10 pagesDimensionnementSliim AmiriNo ratings yet
- Journal of Microwaves, Optoelectronics and Electromagnetic ApplicationsDocument9 pagesJournal of Microwaves, Optoelectronics and Electromagnetic ApplicationsdoğancanNo ratings yet
- Design Optimization Analysis of An Anti-Backlash GearedDocument15 pagesDesign Optimization Analysis of An Anti-Backlash GearedひろしNo ratings yet
- IMAC XIX 194301 Dynamic Analysis CranesDocument8 pagesIMAC XIX 194301 Dynamic Analysis CranesGogyNo ratings yet
- Control of Linear PDFDocument8 pagesControl of Linear PDFDaniel GuzmanNo ratings yet
- A Unified Modeling and Control Design For PrecisioDocument11 pagesA Unified Modeling and Control Design For PrecisioNICONo ratings yet
- An Improved Dynamic Model of Preloaded Ball ScrewDocument11 pagesAn Improved Dynamic Model of Preloaded Ball Screwislam mohammedNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- A Comparative Study of Two Methods For Forward Kinematics and Jacobian Matrix DeterminationDocument6 pagesA Comparative Study of Two Methods For Forward Kinematics and Jacobian Matrix Determinationpiwiw91917No ratings yet
- Conveyor Belt Structure of Belt Dryer Analysis and OptimizationDocument14 pagesConveyor Belt Structure of Belt Dryer Analysis and OptimizationRAMESH KRISHNAN LNo ratings yet
- 高速燃油电磁阀的电磁特性分析与结构优化 Electromagnetic Characteristics Analysis and Structure Optimization of High-Speed Fuel Solenoid ValvesDocument16 pages高速燃油电磁阀的电磁特性分析与结构优化 Electromagnetic Characteristics Analysis and Structure Optimization of High-Speed Fuel Solenoid Valves1045536403No ratings yet
- Applied Sciences: Design General Cam Profiles Based On Finite Element MethodDocument15 pagesApplied Sciences: Design General Cam Profiles Based On Finite Element MethodYuva NNo ratings yet
- Automated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesDocument14 pagesAutomated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesCleves AxiomaNo ratings yet
- 2023-Rafal-Analysis of A Segmented Axial Active Magnetic Bearing For Multi-MWDocument11 pages2023-Rafal-Analysis of A Segmented Axial Active Magnetic Bearing For Multi-MWAlex CooperNo ratings yet
- SadbuyqwgdnqjkDocument16 pagesSadbuyqwgdnqjkFachreza ArdianNo ratings yet
- Technical Paper - SanjibDocument8 pagesTechnical Paper - SanjibDiego VelascoNo ratings yet
- Continuum Manipulator Non Invasive SurgeryDocument14 pagesContinuum Manipulator Non Invasive Surgerymb.farooqui02No ratings yet
- Applied Mathematical Modelling: Moharam Habibnejad Korayem, H.N. Rahimi, A. NikoobinDocument16 pagesApplied Mathematical Modelling: Moharam Habibnejad Korayem, H.N. Rahimi, A. Nikoobintanvir anwarNo ratings yet
- 1 s2.0 S0924424723002510 MainDocument23 pages1 s2.0 S0924424723002510 MainThaiHuynhNgocNo ratings yet
- A Performance-Driven MPC Algorithm For Underactuated Bridge CranesDocument17 pagesA Performance-Driven MPC Algorithm For Underactuated Bridge CranesGogyNo ratings yet
- Integrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape ControlDocument30 pagesIntegrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape Controlsubhra_civ658No ratings yet
- Finite Elements in Analysis and Design: Tiago Morkis Siqueira, Humberto Breves CodaDocument15 pagesFinite Elements in Analysis and Design: Tiago Morkis Siqueira, Humberto Breves CodaCesar HernandezNo ratings yet
- Feedback Linearization and Fuzzy Control For Conical Magnetic BearingsDocument10 pagesFeedback Linearization and Fuzzy Control For Conical Magnetic BearingsVu MinhNo ratings yet
- Multi-Flexible-Body Dynamic Analysis of Horizontal Axis Wind TurbinesDocument20 pagesMulti-Flexible-Body Dynamic Analysis of Horizontal Axis Wind TurbinesNABIL HUSSAINNo ratings yet
- J Mechmachtheory 2021 104291Document14 pagesJ Mechmachtheory 2021 104291luuthuanNo ratings yet
- Title: Pneumatic Power Steering SystemDocument2 pagesTitle: Pneumatic Power Steering SystemFrenz VillasisNo ratings yet
- Machines 10 01052 v3Document25 pagesMachines 10 01052 v3Karthikeyan NatarajanNo ratings yet
- Novel Method of Estimation of Inertial and Dissipative Parameters of A Railway Pantograph ModelDocument24 pagesNovel Method of Estimation of Inertial and Dissipative Parameters of A Railway Pantograph Modelnikunjsingh04No ratings yet
- Comparison of Different Numerical Models of RC EleDocument18 pagesComparison of Different Numerical Models of RC Eleryan rakhmatNo ratings yet
- European Journal of Mechanics / A Solids: Zhen Li, Qingshan Wang, Bin Qin, Wen ShaoDocument19 pagesEuropean Journal of Mechanics / A Solids: Zhen Li, Qingshan Wang, Bin Qin, Wen ShaoRafael SoaresNo ratings yet
- Electronics 11 01987Document20 pagesElectronics 11 01987Rajesh KumarNo ratings yet
- Design and Control of A Directly-Driven Bond Head For Thermosonic BondingDocument11 pagesDesign and Control of A Directly-Driven Bond Head For Thermosonic BondingRockerss RockerssNo ratings yet
- Parameter Identification of Bouc-Wen - PublishedDocument12 pagesParameter Identification of Bouc-Wen - PublishedBirhan AbebawNo ratings yet
- Analytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelDocument10 pagesAnalytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelPhil's ChannelNo ratings yet
- FinalDocument24 pagesFinalApoorvaNo ratings yet
- JMD RackPinion 2000Document8 pagesJMD RackPinion 2000SalvadorNo ratings yet
- Garuda 1306425Document11 pagesGaruda 1306425raghavendran_beeeeNo ratings yet
- 5c X-Tend FG Filter InstallationDocument1 page5c X-Tend FG Filter Installationfmk342112100% (1)
- Information For Producers of Emergency Fittings Acc. To Iec 60598 2 22Document10 pagesInformation For Producers of Emergency Fittings Acc. To Iec 60598 2 22mohammed imran pashaNo ratings yet
- Sexual Hazartment of Women at OfficeDocument3 pagesSexual Hazartment of Women at OfficeMohandas PeriyasamyNo ratings yet
- Dialux BRP391 40W DM CT Cabinet SystemDocument20 pagesDialux BRP391 40W DM CT Cabinet SystemRahmat mulyanaNo ratings yet
- S.No Company Name Location: Executive Packers and MoversDocument3 pagesS.No Company Name Location: Executive Packers and MoversAli KhanNo ratings yet
- Crop Insurance Proposal 31.07.2023 (CLN) PCPMD Inputs Rev SCIDocument14 pagesCrop Insurance Proposal 31.07.2023 (CLN) PCPMD Inputs Rev SCIĐỗ ThăngNo ratings yet
- Chapter 09 SolutionsDocument43 pagesChapter 09 SolutionsDwightLidstromNo ratings yet
- Child Has Does: The Adultery, Child Be and Entitled His Own, The Child's That His DueDocument1 pageChild Has Does: The Adultery, Child Be and Entitled His Own, The Child's That His DuerickmortyNo ratings yet
- Invoice: Buyer Information Delivery Information Transaction DetailsDocument1 pageInvoice: Buyer Information Delivery Information Transaction DetailsZarida SahdanNo ratings yet
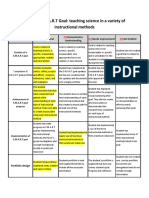
- Smart Goals Rubric 2Document2 pagesSmart Goals Rubric 2api-338549230100% (2)
- Genose Massal D - 6 Juli 2021Document102 pagesGenose Massal D - 6 Juli 2021Phyto LianoNo ratings yet
- BF PP 2017Document4 pagesBF PP 2017Revatee HurilNo ratings yet
- Clinical Assignment 1Document5 pagesClinical Assignment 1Muhammad Noman bin FiazNo ratings yet
- Delhi To Indore Mhwece: Jet Airways 9W-778Document3 pagesDelhi To Indore Mhwece: Jet Airways 9W-778Rahul Verma0% (1)
- Mil DTL 11891g EngDocument96 pagesMil DTL 11891g EngJohn DrakosNo ratings yet
- Stochastic Frontier Analysis of Productive Efficiency in Chinas Forestry IndustryDocument9 pagesStochastic Frontier Analysis of Productive Efficiency in Chinas Forestry Industrynoemie-quinnNo ratings yet
- MCD2000CM4 T1 014 (8 7 12) - CompleteDocument1,062 pagesMCD2000CM4 T1 014 (8 7 12) - CompletePablo Marchant TorresNo ratings yet
- 10 Professional Tax Software Must-Haves White PaperDocument2 pages10 Professional Tax Software Must-Haves White PaperRakesh KumarNo ratings yet
- Random Number GeneratorsDocument13 pagesRandom Number GeneratorsTassy Nokuthanda ChipofyaNo ratings yet
- Fundamental of HDD Technology (3) : OutlineDocument8 pagesFundamental of HDD Technology (3) : OutlineJoseMNo ratings yet
- Practice Questions SheetDocument4 pagesPractice Questions Sheetsaif hasanNo ratings yet
- Step by Step Dilr Preparation GuideDocument22 pagesStep by Step Dilr Preparation GuideVishakha TNo ratings yet
- ReDocument3 pagesReSyahid FarhanNo ratings yet