You might also like
- TOM Syllabus Recovered)Document130 pagesTOM Syllabus Recovered)Divakar RanjanNo ratings yet
- Simplemechanism 180302020307Document58 pagesSimplemechanism 180302020307Kunal GadgilNo ratings yet
- Simple MechanismDocument48 pagesSimple MechanismMudit MaheshwariNo ratings yet
- ME-222-01 (Simple Mechanism)Document32 pagesME-222-01 (Simple Mechanism)Imran TahirNo ratings yet
- ME-222-01 (Simple Mechanism)Document32 pagesME-222-01 (Simple Mechanism)Imran TahirNo ratings yet
- Kom Unit-IDocument52 pagesKom Unit-IJAYAMADHURI CHNo ratings yet
- Mechanics of MachineDocument31 pagesMechanics of MachineRanjit Rajendran100% (1)
- Tom Two Mark QuestionDocument23 pagesTom Two Mark QuestionTamil SelvanNo ratings yet
- Mechanics of Machine: Instructor 2k18 SessionDocument43 pagesMechanics of Machine: Instructor 2k18 Sessionaliyan hassanNo ratings yet
- Unit 1 - Basics of Mechanisms: 1. What Is Kinematics?Document18 pagesUnit 1 - Basics of Mechanisms: 1. What Is Kinematics?VENKATESHNo ratings yet
- B.Sc. Industrial Engineering & Management Semester: 4 2018-2022Document26 pagesB.Sc. Industrial Engineering & Management Semester: 4 2018-2022RafiaNo ratings yet
- Kinematics of MachineryDocument38 pagesKinematics of Machineryajaymechengineer100% (1)
- Tom NotesDocument77 pagesTom Notesjamunaa83No ratings yet
- Mmodule-1 INTRODUCTION To Kinematics of MachineDocument85 pagesMmodule-1 INTRODUCTION To Kinematics of MachineVinayak VernekarNo ratings yet
- Kinematics of Machinery PDFDocument40 pagesKinematics of Machinery PDFkalirajgurusamy92% (26)
- Machine Dynamics - I Lecture Note: (Assist. Prof. Mechanical Engineering Department, VSSUT, Burla, Orissa, India)Document70 pagesMachine Dynamics - I Lecture Note: (Assist. Prof. Mechanical Engineering Department, VSSUT, Burla, Orissa, India)phb1986No ratings yet
- Unit 1Document54 pagesUnit 1Anbu Selvan0% (1)
- I Unit NotesDocument40 pagesI Unit NotesThirumalai RNo ratings yet
- Kinematics of Machinery Lecturer Notes All 5 UnitsDocument45 pagesKinematics of Machinery Lecturer Notes All 5 Unitskumaravel07No ratings yet
- TOM Print NotesDocument82 pagesTOM Print NotesOm TandelNo ratings yet
- Theory of MachineDocument21 pagesTheory of MachineVaibhav Vithoba NaikNo ratings yet
- Unit 1Document44 pagesUnit 1Dheeraj JoshiNo ratings yet
- Sample ChapterDocument15 pagesSample ChapterMohammed ImranNo ratings yet
- Tom Notes PDFDocument60 pagesTom Notes PDFdead of writeNo ratings yet
- Bbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesDocument41 pagesBbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesThi KumarNo ratings yet
- Aim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryDocument6 pagesAim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryAvinash RNo ratings yet
- ME2203 Subject Notes PDFDocument34 pagesME2203 Subject Notes PDFRakeshkumarceg100% (1)
- Introduction To Mechanism and KinematicsDocument17 pagesIntroduction To Mechanism and Kinematicsfieramina83% (6)
- Heat ExchangerDocument23 pagesHeat Exchangertekitech443No ratings yet
- Kinematics Lecture NotesDocument34 pagesKinematics Lecture Notesprasad6048100% (1)
- 1.0 Introduction To Mechanisms 1.1 Definitions: Kinematics and DynamicsDocument4 pages1.0 Introduction To Mechanisms 1.1 Definitions: Kinematics and DynamicsDan MwirigiNo ratings yet
- Kad 1Document81 pagesKad 1Atul Goswami 21BME1315No ratings yet
- TOM EME-653 lAB MANUAL1Document41 pagesTOM EME-653 lAB MANUAL1kotika_somarajuNo ratings yet
- Theory of Machines - Module 1 NotesDocument25 pagesTheory of Machines - Module 1 NotesrrcsdocsNo ratings yet
- Chapter-1 - IntroductionDocument19 pagesChapter-1 - IntroductionVlilvd DvlilvNo ratings yet
- Mechanics of MachineryDocument7 pagesMechanics of MachineryAthul JyothisNo ratings yet
- TOM EssentialsDocument70 pagesTOM EssentialsAtul PandeyNo ratings yet
- MET401 - Theory of MachineDocument161 pagesMET401 - Theory of MachinexilarowNo ratings yet
- Simple MechanismDocument15 pagesSimple MechanismPrabal SinghNo ratings yet
- Kinematics of Machines: (Course Code:17ME42)Document63 pagesKinematics of Machines: (Course Code:17ME42)Ruslan ZhukNo ratings yet
- Intoduction of The Concepts of Kinematics MachineriesDocument8 pagesIntoduction of The Concepts of Kinematics MachineriesKing OsumNo ratings yet
- Theory of Machines and Mechanism: Łukasz Jedliński, PH.D., EngDocument36 pagesTheory of Machines and Mechanism: Łukasz Jedliński, PH.D., EngdumpyNo ratings yet
- BiomaterialsDocument39 pagesBiomaterialsNehanthNo ratings yet
- Mechanism 69869Document28 pagesMechanism 69869Abi DemNo ratings yet
- Lecture 5 - Simple MechanismsDocument27 pagesLecture 5 - Simple MechanismsAhmed Mohamed SalihNo ratings yet
- Theory of Machine PresentationDocument25 pagesTheory of Machine Presentationkhalid khanNo ratings yet
- Chapter IDocument58 pagesChapter Imalek mohammedNo ratings yet
- Part I PDFDocument14 pagesPart I PDFgvnagamaniNo ratings yet
- ME8492 QB 03 - by LearnEngineering - inDocument41 pagesME8492 QB 03 - by LearnEngineering - inPRASANTHNo ratings yet
- Econtents of TomDocument88 pagesEcontents of TomSuraj 1212No ratings yet
- University Institute of Engineering Department MechanicalDocument35 pagesUniversity Institute of Engineering Department MechanicalKhushi bhandariNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsFrom EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsRating: 1 out of 5 stars1/5 (1)
- Utility U (X, Y) (XY)Document8 pagesUtility U (X, Y) (XY)MadhunikaNo ratings yet
- Dowel Bar Calculation-06106Document164 pagesDowel Bar Calculation-06106Nguyễn Văn Ban100% (2)
- Fx32a Users Manual EngDocument4 pagesFx32a Users Manual EngSerg100% (1)
- Titan ManufacturingDocument140 pagesTitan ManufacturingGrigoras CosminNo ratings yet
- I C EngineDocument3 pagesI C EngineAMIT PRAJAPATINo ratings yet
- Engineering Properties of Intact RocksDocument21 pagesEngineering Properties of Intact Rocksاديان بهجتNo ratings yet
- Wind TurbinesDocument175 pagesWind TurbinesTrexNo ratings yet
- Emissivity Manuscript Revision (Final)Document28 pagesEmissivity Manuscript Revision (Final)Praful PatilNo ratings yet
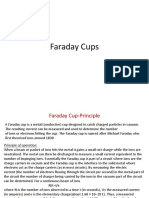
- Faraday CupsDocument10 pagesFaraday CupsAshish SharmaNo ratings yet
- RLX Precision Range-8pDocument8 pagesRLX Precision Range-8pAngela MarkovskaNo ratings yet
- 1 Sound, Pitch, Loudness, Doppler EffectDocument18 pages1 Sound, Pitch, Loudness, Doppler Effectvigneshwaran dhakshinamoorthyNo ratings yet
- Literature Review: Rail Structure Interaction Analysis and Its Effect On FoundationDocument11 pagesLiterature Review: Rail Structure Interaction Analysis and Its Effect On FoundationSHRADDHA KADAMNo ratings yet
- SIM Math 2Document17 pagesSIM Math 2Glen Beltran HidalgoNo ratings yet
- Second Order Hold Based Discretization Method ofDocument5 pagesSecond Order Hold Based Discretization Method ofvitinrjNo ratings yet
- 3.6 Solving Systems of Linear Equations in Three VariablesDocument12 pages3.6 Solving Systems of Linear Equations in Three VariablesBorhan Nordin DaudNo ratings yet
- 101.1 AlumAssoc EPD ColdRolled 20141016 0Document14 pages101.1 AlumAssoc EPD ColdRolled 20141016 0esivaks2000No ratings yet
- High Voltage EngineeringDocument38 pagesHigh Voltage EngineeringsjNo ratings yet
- Application Modules With Demag Dedrive Compact: Complete Solutions For Travel and Lifting ApplicationsDocument2 pagesApplication Modules With Demag Dedrive Compact: Complete Solutions For Travel and Lifting ApplicationsAnonymous v1oFsM6igNo ratings yet
- Introduction To Quantum Metrology by Waldemar Nawrocki (2015)Document287 pagesIntroduction To Quantum Metrology by Waldemar Nawrocki (2015)Vallik TadNo ratings yet
- HVAC Handbook HVAC Design Brief (Singapore)Document26 pagesHVAC Handbook HVAC Design Brief (Singapore)Sam Wing Hong50% (2)
- The Origin of Mathematical InductionDocument10 pagesThe Origin of Mathematical Inductionjesusdark44No ratings yet
- Soil Engineering & Geotechnics: Analysis of Potential ProblemsDocument1 pageSoil Engineering & Geotechnics: Analysis of Potential ProblemsdzingoNo ratings yet
- Physics I ProblemsDocument1 pagePhysics I ProblemsbosschellenNo ratings yet
- Thermal Concrete CrackingDocument7 pagesThermal Concrete Crackingignacio_vazquez_18No ratings yet
- Inverse Functions PDFDocument5 pagesInverse Functions PDFSivagami SaminathanNo ratings yet
- Corrosion Control MethodsDocument4 pagesCorrosion Control MethodsYousuf MemonNo ratings yet
- Fenner-Dunlop Conveyor Problems & SolutionsDocument18 pagesFenner-Dunlop Conveyor Problems & Solutionsmickey262010No ratings yet
- 2019 WMI Grade 5 Questions Part 2-英 PDFDocument3 pages2019 WMI Grade 5 Questions Part 2-英 PDFAndreas Budimancini50% (4)
- Professional Photovoltaic Module: Manual de Usuario User S ManualDocument2 pagesProfessional Photovoltaic Module: Manual de Usuario User S ManualCarlos UenoNo ratings yet
- Struktur Baja 1Document33 pagesStruktur Baja 1Agung S NurcahyanaNo ratings yet