You might also like
- Powershift TransmissionsDocument27 pagesPowershift TransmissionsJonathanDavidDeLosSantosAdornoNo ratings yet
- XLS3000Document10 pagesXLS3000heikel100% (1)
- 1 ADocument12 pages1 Asharjeel hassanNo ratings yet
- Investigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric VehiclesDocument10 pagesInvestigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric Vehiclespathfinder tamlukNo ratings yet
- Solar Charging Station For Electric VehiclesDocument5 pagesSolar Charging Station For Electric VehiclesDriss OuladabbouNo ratings yet
- 4.battery Chargers in Electric VehiclesDocument3 pages4.battery Chargers in Electric VehiclesEssa SiddiquiNo ratings yet
- Batch 4Document58 pagesBatch 4AJAY KUMAR GODANo ratings yet
- Design and Modeling of V2G Inductive Charging System For Light-Duty Electric VehiclesDocument7 pagesDesign and Modeling of V2G Inductive Charging System For Light-Duty Electric Vehiclesbabu tech guruNo ratings yet
- Extreme Fast Charging of Electric Vehicles: A Technology OverviewDocument17 pagesExtreme Fast Charging of Electric Vehicles: A Technology OverviewNik UrlaubNo ratings yet
- C SuarezHPCDocument8 pagesC SuarezHPCharshinNo ratings yet
- Modelling of Hybrid Electric Vehicle Charger and Study The Simulation ResultsDocument6 pagesModelling of Hybrid Electric Vehicle Charger and Study The Simulation ResultsNarendra YadavNo ratings yet
- 2020 - Fast Charging Converter and Control Algorithm For Solar PV BatteryDocument13 pages2020 - Fast Charging Converter and Control Algorithm For Solar PV BatteryAchyut Narayan HNo ratings yet
- IET Power Electronics - 2023 - Pesantez - Transformerless Partial Power Converter Topology For Electric Vehicle Fast ChargeDocument13 pagesIET Power Electronics - 2023 - Pesantez - Transformerless Partial Power Converter Topology For Electric Vehicle Fast ChargeLuis MuñozNo ratings yet
- Modelling and Simulation of Vehicle Electric Power SystemDocument9 pagesModelling and Simulation of Vehicle Electric Power Systemk.nidharaNo ratings yet
- Charge While DrivingDocument6 pagesCharge While DrivingMạnh Hùng VũNo ratings yet
- Design of A Feedback Controlled Dual Sided LCC Converter To Achieve ZVS For Electric Vehicle Wireless Charging ApplicationsDocument6 pagesDesign of A Feedback Controlled Dual Sided LCC Converter To Achieve ZVS For Electric Vehicle Wireless Charging Applicationsjuan8aNo ratings yet
- Selected PaperDocument12 pagesSelected PaperprashanthiNo ratings yet
- Shukla 2020Document6 pagesShukla 2020Avidip DeyNo ratings yet
- A Solar PV Array Based Multipurpose EV ChargerDocument6 pagesA Solar PV Array Based Multipurpose EV ChargerIJAERS JOURNALNo ratings yet
- Biya 2019Document6 pagesBiya 2019sonica jNo ratings yet
- PV and Grid Interfaced Plugin EV Battery Charger Operating in PVG PV and VG ModesInternational Journal of Recent Technology and EngineeringDocument13 pagesPV and Grid Interfaced Plugin EV Battery Charger Operating in PVG PV and VG ModesInternational Journal of Recent Technology and EngineeringApolo GreenNo ratings yet
- Song 2018Document7 pagesSong 2018Ali HussienNo ratings yet
- Effectiveness of Battery-Supercapacitor Combination in Electric VehiclesDocument6 pagesEffectiveness of Battery-Supercapacitor Combination in Electric VehiclesHanumant ChikuNo ratings yet
- Design of 2kW DC Charger For Two Wheelers: D. M. Chandwadkar, Azmina Gayasuddin Maniyar, S. P. UgaleDocument4 pagesDesign of 2kW DC Charger For Two Wheelers: D. M. Chandwadkar, Azmina Gayasuddin Maniyar, S. P. UgaleDr Meena BoyNo ratings yet
- Industrial Electronics For Electric Transportation: Current State-of-the-Art and Future ChallengesDocument12 pagesIndustrial Electronics For Electric Transportation: Current State-of-the-Art and Future ChallengesAbhijeet KumarNo ratings yet
- E-Bike Using Wireless Charging and Split Battery With Renewable EnergyDocument8 pagesE-Bike Using Wireless Charging and Split Battery With Renewable Energytuketoo worksNo ratings yet
- Grid Connected Electric Vehicle Charging Station Using PV SourceDocument4 pagesGrid Connected Electric Vehicle Charging Station Using PV Sourcesurya kNo ratings yet
- A Single-Phase Integrated Onboard Battery Charger Using Three-Phase AC Motor For Plug-In Electric Vehicles With PFCDocument9 pagesA Single-Phase Integrated Onboard Battery Charger Using Three-Phase AC Motor For Plug-In Electric Vehicles With PFCMohan KaleNo ratings yet
- Santhosh 221EE6457Document13 pagesSanthosh 221EE6457baibhab221bNo ratings yet
- Improved Power Quality On-Board Integrated Charger With Reduced Switching StressDocument11 pagesImproved Power Quality On-Board Integrated Charger With Reduced Switching Stressamala081998No ratings yet
- EVCHARGINgDocument48 pagesEVCHARGINgPraveen kumarNo ratings yet
- On-Board Chargers For High-Voltage Electric VehiclDocument19 pagesOn-Board Chargers For High-Voltage Electric VehiclNGUYỄN HỮU NGHĨA MSSV0508No ratings yet
- EV Charging - Electrical ArchitecturesDocument10 pagesEV Charging - Electrical ArchitecturesetnantoNo ratings yet
- Electric and Hybrid Vehicle Power Electronics EffiDocument12 pagesElectric and Hybrid Vehicle Power Electronics Effirohit0000kushwahaNo ratings yet
- Control of Battery Charger For Electric VehiclesDocument6 pagesControl of Battery Charger For Electric VehiclesIjaems JournalNo ratings yet
- Dynamic Control of Traction Motor For EV Fed Via DDocument18 pagesDynamic Control of Traction Motor For EV Fed Via Dtengfei.sunNo ratings yet
- Comprehensive Review and Comparison of DC Fast Charging Converter TopologiesDocument6 pagesComprehensive Review and Comparison of DC Fast Charging Converter TopologiesDon ReloNo ratings yet
- A Single-Stage Charger For LEV Based On Quadratic Buck-Boost AC-DC Converter TopologyDocument12 pagesA Single-Stage Charger For LEV Based On Quadratic Buck-Boost AC-DC Converter TopologyRAMESH BABU EEENo ratings yet
- Eull2021 - Non Isolated Smart Fast Charger Integrated in The Traction Drivetrain of Electrified VehiclesDocument17 pagesEull2021 - Non Isolated Smart Fast Charger Integrated in The Traction Drivetrain of Electrified VehiclesAmanuel Amare GebrekidanNo ratings yet
- A Multifunctional Solar PV and Grid Based On-Board Converter For Electric VehiclesDocument31 pagesA Multifunctional Solar PV and Grid Based On-Board Converter For Electric VehiclesprashanthiNo ratings yet
- Extreme Fast Charging of Electric Vehicles ATechnology OverviewDocument17 pagesExtreme Fast Charging of Electric Vehicles ATechnology Overviewruhul aminNo ratings yet
- Future Vehicle Society Based On Electric Motor, Capacitor and Wireless Power SupplyDocument5 pagesFuture Vehicle Society Based On Electric Motor, Capacitor and Wireless Power Supplyducvinhhung2No ratings yet
- Charging of EVs: Slow Vs FastDocument25 pagesCharging of EVs: Slow Vs FastRavi Kashyap50% (2)
- Bidirecional fastChargingStation ReativePowerCompensation 2015Document11 pagesBidirecional fastChargingStation ReativePowerCompensation 2015Débora MartinsNo ratings yet
- DGAEJ-Uzma PaperDocument20 pagesDGAEJ-Uzma PaperFARHAD ILAHI BakhshNo ratings yet
- Ev Charging TechnlogiesDocument43 pagesEv Charging TechnlogiesAtheli Vijay Chandra100% (1)
- Future Vehicle Society Based OnDocument5 pagesFuture Vehicle Society Based OnNarendra YadavNo ratings yet
- Untitled PresentationDocument18 pagesUntitled PresentationHaleel ThangalNo ratings yet
- Multiterminal Converter Based Ev Charging Station Integrated With PV3Document5 pagesMultiterminal Converter Based Ev Charging Station Integrated With PV3HITESH PONNOJUNo ratings yet
- Integrated Converter With G2V V2G and DC V2V Charging Capabilities For Switched Reluctance Motor Drive-Train Based EV ApplicationDocument14 pagesIntegrated Converter With G2V V2G and DC V2V Charging Capabilities For Switched Reluctance Motor Drive-Train Based EV ApplicationhemaNo ratings yet
- Research ArticleDocument11 pagesResearch ArticleDung NguyenNo ratings yet
- An Effective Control Structure of On-Board Battery Charger For Electric VehiclesDocument9 pagesAn Effective Control Structure of On-Board Battery Charger For Electric VehiclesInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Tri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesDocument8 pagesTri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesSureshNo ratings yet
- Designing An On-Board Charger To Efficiently Charge Multiple Electric VehiclesDocument19 pagesDesigning An On-Board Charger To Efficiently Charge Multiple Electric VehiclesBALASUNDAR CNo ratings yet
- An Implementation of Solar PV Array Based Multifunctional EV ChargerDocument13 pagesAn Implementation of Solar PV Array Based Multifunctional EV Chargerltve20ee142No ratings yet
- Bidirectional Isolated DC-DC Converter For Hybrid Electric Vehicle ChargingDocument9 pagesBidirectional Isolated DC-DC Converter For Hybrid Electric Vehicle ChargingIJSREDNo ratings yet
- Phase 1 Report FinalDocument14 pagesPhase 1 Report FinalSupreet P ANo ratings yet
- Single Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghDocument14 pagesSingle Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghTJPRC PublicationsNo ratings yet
- Electric Vehicle Charging Station Web Application: Submitted byDocument28 pagesElectric Vehicle Charging Station Web Application: Submitted by20TUIT018 DHANA PRIYA R.No ratings yet
- Fast Charging Station: Pure Electric VehiclesDocument25 pagesFast Charging Station: Pure Electric VehiclesDîñ Êsh Chä ÛhâñNo ratings yet
- PV-Battery Series Inverter Architecture: A Solar Inverter For Seamless Battery Integration With Partial-Power DC-DC OptimizerDocument8 pagesPV-Battery Series Inverter Architecture: A Solar Inverter For Seamless Battery Integration With Partial-Power DC-DC OptimizerroyNo ratings yet
- Analysis and Design of BLDC Motor Control in Regenerative BrakingDocument5 pagesAnalysis and Design of BLDC Motor Control in Regenerative BrakingDEBARATI DAMNo ratings yet
- 99 - Final ManuscriptDocument6 pages99 - Final ManuscriptDEBARATI DAMNo ratings yet
- Comparative Analysis of Boost and Buck-Boost Converter For Power Factor Correction Using Hysteresis Band Current ControlDocument6 pagesComparative Analysis of Boost and Buck-Boost Converter For Power Factor Correction Using Hysteresis Band Current ControlDEBARATI DAMNo ratings yet
- A Multifunctional Integrated Onboard Battery Charger For Plug-In Electric Vehicles PEVsDocument6 pagesA Multifunctional Integrated Onboard Battery Charger For Plug-In Electric Vehicles PEVsDEBARATI DAMNo ratings yet
- DrivingCharging Integrated Controller For Electric VehiclesDocument19 pagesDrivingCharging Integrated Controller For Electric VehiclesDEBARATI DAMNo ratings yet
- A Single Phase Integrated Battery Charger With Active Power Decoupling For Electric VehiclesDocument6 pagesA Single Phase Integrated Battery Charger With Active Power Decoupling For Electric VehiclesDEBARATI DAMNo ratings yet
- Aalborg Universitet: Chen, Linglin Shao, Shuai Xiao, Qian Tarisciotti, Luca Wheeler, Patrick Dragicevic, TomislavDocument11 pagesAalborg Universitet: Chen, Linglin Shao, Shuai Xiao, Qian Tarisciotti, Luca Wheeler, Patrick Dragicevic, TomislavDEBARATI DAMNo ratings yet
- All Accounts Balance Details: S. No. Account Number Account Type Branch Rate of Interest (% P.a.) BalanceDocument1 pageAll Accounts Balance Details: S. No. Account Number Account Type Branch Rate of Interest (% P.a.) BalanceDEBARATI DAMNo ratings yet
- Very-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDocument9 pagesVery-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDEBARATI DAMNo ratings yet
- Single Stage Dual Active Bridge AC-DC Converter With Active Power DecouplingDocument5 pagesSingle Stage Dual Active Bridge AC-DC Converter With Active Power DecouplingDEBARATI DAMNo ratings yet
- Decoupling Control of Input-Paralleled System With Dual Active Bridge ConvertersDocument6 pagesDecoupling Control of Input-Paralleled System With Dual Active Bridge ConvertersDEBARATI DAMNo ratings yet
- A Single Phase DC-AC Dual Active Bridge Series Resonant Converter For Photovoltaic ApplicationsDocument6 pagesA Single Phase DC-AC Dual Active Bridge Series Resonant Converter For Photovoltaic ApplicationsDEBARATI DAMNo ratings yet
- Double Step-Down Dual Active Bridge DC-DC ConverterDocument8 pagesDouble Step-Down Dual Active Bridge DC-DC ConverterDEBARATI DAMNo ratings yet
- A Novel Dual Phase Shift Modulation For Dual-Active - Bridge ConverterDocument6 pagesA Novel Dual Phase Shift Modulation For Dual-Active - Bridge ConverterDEBARATI DAMNo ratings yet
- 2008 23 6 IEEE PELS Dual PhaseshiftDocument10 pages2008 23 6 IEEE PELS Dual PhaseshiftDEBARATI DAMNo ratings yet
- Zener BZX 3V6Document2 pagesZener BZX 3V6Rifqi ZayusmanNo ratings yet
- Technical YKDocument16 pagesTechnical YKnairam2003No ratings yet
- Computers and The InternetDocument5 pagesComputers and The Internetapi-257819271No ratings yet
- Second Quarter: Week 8Document31 pagesSecond Quarter: Week 8Mary Grace Lamarroza RosagaranNo ratings yet
- Design and Fabrication of Four Way Hacksaw MachineDocument22 pagesDesign and Fabrication of Four Way Hacksaw MachineDinesh KumarNo ratings yet
- Repair Guides - Automatic Transmission - Transmission Removal & InstallationDocument17 pagesRepair Guides - Automatic Transmission - Transmission Removal & InstallationJayD505No ratings yet
- Epic 950 Support IGT AVPsDocument3 pagesEpic 950 Support IGT AVPsluisNo ratings yet
- DF 624Document9 pagesDF 624Moheb MakarNo ratings yet
- Cool Electronic Device Circuit ProjectsDocument169 pagesCool Electronic Device Circuit ProjectsNemo VeřitelNo ratings yet
- Color Television/ Video Cassette Recorder: Service ManualDocument61 pagesColor Television/ Video Cassette Recorder: Service Manualomaderas1No ratings yet
- Paradox Spectra 1728EX Programming/Reference ManualDocument40 pagesParadox Spectra 1728EX Programming/Reference ManualHayden Wilson100% (1)
- A68n 5600eDocument52 pagesA68n 5600eMC Sai ThihaNo ratings yet
- Testing & Adjusting Cat - Dcs.sis - Controller PDFDocument179 pagesTesting & Adjusting Cat - Dcs.sis - Controller PDFmnlar100% (7)
- TS Flash Writer Manual - Rev1.04Document5 pagesTS Flash Writer Manual - Rev1.04taehyun KimNo ratings yet
- Three Phase TransformersDocument22 pagesThree Phase TransformersSanjeev Kumar T MNo ratings yet
- Spec Bonfire EDocument4 pagesSpec Bonfire ENontonFilemNo ratings yet
- AUSGEN 100kva Perkins Silent 1006TG2ADocument5 pagesAUSGEN 100kva Perkins Silent 1006TG2AMarkqshot JaladaraNo ratings yet
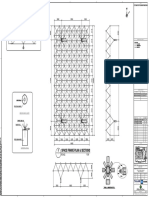
- Space Frame Plan & Sections: Scale: 1:50Document3 pagesSpace Frame Plan & Sections: Scale: 1:50muhammedirfankhanNo ratings yet
- Stamford PI7Document2 pagesStamford PI7Donald Santana BautistaNo ratings yet
- Laundry Center Dryer Tech Data Sheet: NO - Normally Open NTC - NTC Thermistor MCF - Machine Configuration FileDocument40 pagesLaundry Center Dryer Tech Data Sheet: NO - Normally Open NTC - NTC Thermistor MCF - Machine Configuration FilePedro IsmaelNo ratings yet
- Ete1024 - Single Phase WiringDocument24 pagesEte1024 - Single Phase Wiringmr_rizal2110No ratings yet
- Project Title A New Three Phase Seven-Level Inverter With Cascaded H-Bridge TopologyDocument6 pagesProject Title A New Three Phase Seven-Level Inverter With Cascaded H-Bridge TopologyEjNo ratings yet
- As 62040.3-2002 Uninterruptible Power Systems (UPS) Method of Specifying The Performance and Test RequirementDocument10 pagesAs 62040.3-2002 Uninterruptible Power Systems (UPS) Method of Specifying The Performance and Test RequirementSAI Global - APACNo ratings yet
- Router Lathe Plan - WoodArchivistDocument34 pagesRouter Lathe Plan - WoodArchivistEricsNo ratings yet
- Prevost Service TrainingDocument78 pagesPrevost Service TrainingObed Humberto Aguirre SosaNo ratings yet
- Checklist For QCDocument12 pagesChecklist For QCvistalmarlonNo ratings yet
- Diode RectifiersDocument33 pagesDiode RectifiersMuhammad Asghar KhanNo ratings yet
- Electrolux Refrigerator Error CodesDocument5 pagesElectrolux Refrigerator Error CodesLEX COMPANYNo ratings yet