You might also like
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- MXT Unit 5Document20 pagesMXT Unit 5ojas.s.dixitNo ratings yet
- Programming A PIDE Instruction in A Function Block DiagramDocument7 pagesProgramming A PIDE Instruction in A Function Block DiagramLuis Claudio RamosNo ratings yet
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- PID ControllerDocument16 pagesPID ControllerDevarya ChhibberNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- Universidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoDocument6 pagesUniversidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoAndres LozanoNo ratings yet
- ProcessControl PDFDocument2 pagesProcessControl PDFfaisal84inNo ratings yet
- Week14pidmay242016pe3032 160530081519Document57 pagesWeek14pidmay242016pe3032 160530081519AztvNo ratings yet
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocument18 pagesPidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNo ratings yet
- Control SystenDocument87 pagesControl SystenKpsingh KalsiNo ratings yet
- Ipc PPT 7thDocument25 pagesIpc PPT 7thChemical engrNo ratings yet
- Control Systems Overview Professor GopalankrishnaDocument23 pagesControl Systems Overview Professor GopalankrishnaJameNo ratings yet
- Name: Roll: Year: Department: Subject: Subject CodeDocument11 pagesName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasNo ratings yet
- DA-PID DesignDocument6 pagesDA-PID Designjamal2877No ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- PlssDocument21 pagesPlssKrishi ChhedaNo ratings yet
- Discrete PI and PID Controller Review for Induction Motor DriveDocument4 pagesDiscrete PI and PID Controller Review for Induction Motor DriveAhmad MqdadNo ratings yet
- Control Engineering: HapterDocument45 pagesControl Engineering: Hapterkyaw phone htetNo ratings yet
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 pagesGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasNo ratings yet
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- LabExercise 9 - Dynamic Systems SimulationDocument16 pagesLabExercise 9 - Dynamic Systems SimulationQueenie Rose PercilNo ratings yet
- Unitvi Control SystemsDocument47 pagesUnitvi Control SystemsVishal SharmaNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- Modren Control: Prepared by The StudentDocument12 pagesModren Control: Prepared by The StudenthassanalabasiNo ratings yet
- Chapter 6 Basic Control TheoryDocument94 pagesChapter 6 Basic Control Theoryislahid0% (1)
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- Automation & Controls Processes ExplainedDocument17 pagesAutomation & Controls Processes ExplainedMalaka UdayangaNo ratings yet
- PID controller explainedDocument22 pagesPID controller explainedmansoorNo ratings yet
- Design and applications of fuzzy logic PID controllerDocument19 pagesDesign and applications of fuzzy logic PID controllerPriya BhardwajNo ratings yet
- Boiler Flow Control Using PID and Fuzzy Logic ControllerDocument5 pagesBoiler Flow Control Using PID and Fuzzy Logic Controllerحسين شنيقيNo ratings yet
- Pid ThoryDocument24 pagesPid ThoryPravin KumarNo ratings yet
- 20a Three Mode PID Control AustinDocument9 pages20a Three Mode PID Control AustinJenny AzzahraNo ratings yet
- Control System - WikipediaDocument8 pagesControl System - WikipediafwefNo ratings yet
- Implementación Del Control PID para El Dimensionamiento Longitudinal Con Retroalimentación Con Sensor UltrasónicoDocument7 pagesImplementación Del Control PID para El Dimensionamiento Longitudinal Con Retroalimentación Con Sensor UltrasónicoAbel Nohpal BrionesNo ratings yet
- ABB PID ControlDocument21 pagesABB PID Controlciocioi iancuNo ratings yet
- Proportional ControllersDocument18 pagesProportional ControllersUmair MajeedNo ratings yet
- Automatic Control System and Control LoopsDocument60 pagesAutomatic Control System and Control Loopsmoovendan pNo ratings yet
- Proportional Integral Derivative (PID)Document27 pagesProportional Integral Derivative (PID)GilagidkidNo ratings yet
- PID Lab HandoutDocument16 pagesPID Lab HandoutsteedNo ratings yet
- Moderncontrol Lec01 Introductiontocontrolsystem 170327063500Document27 pagesModerncontrol Lec01 Introductiontocontrolsystem 170327063500CHIMPAYE JOSEPHNo ratings yet
- Special Nonlinear PID ControllersDocument25 pagesSpecial Nonlinear PID ControllersawalmeidaNo ratings yet
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 pagesCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNo ratings yet
- Lecture (1) : Introduction To Control SystemsDocument27 pagesLecture (1) : Introduction To Control SystemsA .B. SolankiNo ratings yet
- ControllersDocument30 pagesControllersharitha vijiNo ratings yet
- Industrial Electronics Class Review on Process Control SystemsDocument3 pagesIndustrial Electronics Class Review on Process Control SystemsHammad AnsariNo ratings yet
- PID ControlDocument32 pagesPID ControlSyamil RahmanNo ratings yet
- Unit 1 Control SystemDocument86 pagesUnit 1 Control SystemVijay Ct67% (3)
- PID CONTROLLER EXPERIMENTDocument13 pagesPID CONTROLLER EXPERIMENTMohd KhairiNo ratings yet
- Chapt 3Document23 pagesChapt 3Pradhunya KambleNo ratings yet
- 2008 Infosys Model QuestionsDocument23 pages2008 Infosys Model Questionsapi-3824713No ratings yet
- Understanding The Nature of ReligionDocument41 pagesUnderstanding The Nature of Religioneden l. abadNo ratings yet
- STP1236 Eb.1415051 1 PDFDocument208 pagesSTP1236 Eb.1415051 1 PDFpaolaNo ratings yet
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- IGCSE Biology 4325 2H Mark SchemeDocument14 pagesIGCSE Biology 4325 2H Mark SchememuhajireenNo ratings yet
- Kyocera Fs-6900 Parts ManualDocument28 pagesKyocera Fs-6900 Parts ManualNic CowpeNo ratings yet
- FLIR Blackfly Users ManualDocument53 pagesFLIR Blackfly Users ManualPavan Kumar BittuNo ratings yet
- Kyocera Servise ManualDocument613 pagesKyocera Servise ManualleukadiosNo ratings yet
- Stereochemistry MSCDocument29 pagesStereochemistry MSCBapu Thorat50% (2)
- Legend of Nueva VizcayaDocument10 pagesLegend of Nueva VizcayaAndreanna Maria100% (1)
- Creme Brulee - Printer Friendly PDFDocument1 pageCreme Brulee - Printer Friendly PDFmtlpcguysNo ratings yet
- Philips HF C-Arm BrochureDocument2 pagesPhilips HF C-Arm Brochuregarysov50% (2)
- yudaturana,+Manajer+Jurnal,+dr +nelson+rev+2+ (162-172)Document12 pagesyudaturana,+Manajer+Jurnal,+dr +nelson+rev+2+ (162-172)Fath TiaraNo ratings yet
- XR5 9 Element 5 Band Yagi 20-17-15-12-10MDocument16 pagesXR5 9 Element 5 Band Yagi 20-17-15-12-10Msboonuy331No ratings yet
- Liebert AC4 Controller ManualDocument88 pagesLiebert AC4 Controller ManualGreg WilliamsNo ratings yet
- Chemistry of Food Changes During Storage: Group 7Document22 pagesChemistry of Food Changes During Storage: Group 7Sonny MichaelNo ratings yet
- F0a7c Compal LA-A994p r1.0 2014Document38 pagesF0a7c Compal LA-A994p r1.0 2014DeyProNo ratings yet
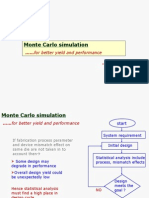
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- BAlochistanDocument14 pagesBAlochistanzee100% (1)
- S2 Papers FinalizedDocument149 pagesS2 Papers FinalizedRaffles HolmesNo ratings yet
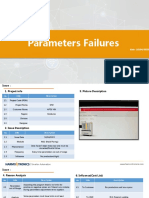
- SFM Issue Repor 15-4-2023Document3 pagesSFM Issue Repor 15-4-2023Esdras Fransua CisnerosNo ratings yet
- 9701 w09 QP 41Document20 pages9701 w09 QP 41Hubbak KhanNo ratings yet
- Atlas MothDocument1 pageAtlas Mothlililala92No ratings yet
- Mother Teresa JerseyDocument2 pagesMother Teresa JerseyTanya van Zyl100% (1)
- Gen Ed Answer Key (A)Document7 pagesGen Ed Answer Key (A)Antonette Escarpe TorcinoNo ratings yet
- Explore the beaches and parks of Labuan IslandDocument2 pagesExplore the beaches and parks of Labuan IslandDudeNo ratings yet
- Hydraulic Excavator RH 200 1,568 kW 30.5 m3Document8 pagesHydraulic Excavator RH 200 1,568 kW 30.5 m3mchan1965100% (1)
- Air release plug and lifting lug details for 15 MVA 66/11.55 kV transformer radiatorDocument1 pageAir release plug and lifting lug details for 15 MVA 66/11.55 kV transformer radiatorshravan Kumar SinghNo ratings yet
- Treatment of Headaches in The ED With Lower Cervical Intramuscular Bupivacaine Injections: A 1-Year Retrospective Review of 417 PatientsDocument9 pagesTreatment of Headaches in The ED With Lower Cervical Intramuscular Bupivacaine Injections: A 1-Year Retrospective Review of 417 PatientsLarry B. Mellick, MDNo ratings yet