You might also like
- Chapter 4: Earth Materials and Processes: Exogenic ProcessDocument67 pagesChapter 4: Earth Materials and Processes: Exogenic ProcessGwen Mara Tanggol100% (4)
- 2nd Quarter Exam Science 8Document3 pages2nd Quarter Exam Science 8Sherine Marianne Ignacio100% (1)
- Design Calculations For Pressure VesselsDocument51 pagesDesign Calculations For Pressure VesselsFuehrerNo ratings yet
- Introduction To Remote Sensing (PDFDrive)Document366 pagesIntroduction To Remote Sensing (PDFDrive)Artanis0% (1)
- David E Anderson, Andrew S Goudie, Adrian G Parker - Global Environments Through The Quaternary - Exploring Evironmental Change-Oxford University Press (2013) PDFDocument423 pagesDavid E Anderson, Andrew S Goudie, Adrian G Parker - Global Environments Through The Quaternary - Exploring Evironmental Change-Oxford University Press (2013) PDFYulitza ParadaNo ratings yet
- Sea Clutter & Surface ClutterDocument22 pagesSea Clutter & Surface ClutterSaraswathi Asirvatham100% (1)
- Advanced Far-Infrared DetectorsDocument20 pagesAdvanced Far-Infrared DetectorsbrunoNo ratings yet
- Pearson Interactive Physical Science Chapter 2 Test Answer KeyDocument2 pagesPearson Interactive Physical Science Chapter 2 Test Answer KeyTerrence CarreraNo ratings yet
- Evaporation Pond SizingDocument3 pagesEvaporation Pond SizingSaeid Rahimi Mofrad100% (1)
- VTBS Bangkok / Suvarnabhumi Intl: AirportDocument53 pagesVTBS Bangkok / Suvarnabhumi Intl: AirportThar LattNo ratings yet
- Ch1 Introduction+to+Radar+SystemsDocument70 pagesCh1 Introduction+to+Radar+SystemsWesley GeorgeNo ratings yet
- Ef FaradayDocument8 pagesEf FaradayOscar EustáchioNo ratings yet
- G. Sonnabend Et Al - High-Resolution Infrared Measurements of H2O and SiO in SunspotsDocument9 pagesG. Sonnabend Et Al - High-Resolution Infrared Measurements of H2O and SiO in SunspotsRemazzzNo ratings yet
- Observation of Boundary Layer Aerosols Using A Continuously Operated, Portable Lidar SystemDocument8 pagesObservation of Boundary Layer Aerosols Using A Continuously Operated, Portable Lidar SystemramanariesNo ratings yet
- Solar Radiation Resource Assessment by Means of Silicon CellsDocument9 pagesSolar Radiation Resource Assessment by Means of Silicon CellsalexanderritschelNo ratings yet
- Near-Infrared Laser Photoacoustic Detection of Methane The Impact of Molecular RelaxationDocument10 pagesNear-Infrared Laser Photoacoustic Detection of Methane The Impact of Molecular RelaxationАртем КлимчукNo ratings yet
- Wilson, Roberts - International Conference On Space Optical Systems and Applications (ICSOS) - 2014 - Recent Developments in Adaptive OpDocument5 pagesWilson, Roberts - International Conference On Space Optical Systems and Applications (ICSOS) - 2014 - Recent Developments in Adaptive OpEdoardo AlbertiNo ratings yet
- Toward The Uplink Correction: Application of Adaptive Optics Techniques On Free-Space Optical Communications Through The AtmosphereDocument12 pagesToward The Uplink Correction: Application of Adaptive Optics Techniques On Free-Space Optical Communications Through The Atmospherealu0100353662No ratings yet
- Volcanic GasesDocument6 pagesVolcanic Gasesdavidedamiani5No ratings yet
- The Faraday Effect: ObjectiveDocument24 pagesThe Faraday Effect: ObjectiveEdwin SizaNo ratings yet
- Faraday PDFDocument24 pagesFaraday PDFrajdeep paulNo ratings yet
- Periodic TableDocument16 pagesPeriodic Tableombraga1896No ratings yet
- Atot-2008jtecha1100 1Document9 pagesAtot-2008jtecha1100 1Khalid AliNo ratings yet
- Fiber Optic Hydrophone Noise Equivalent Pressure Sensitivity Using Homodyne Photo Detection TechniqueDocument22 pagesFiber Optic Hydrophone Noise Equivalent Pressure Sensitivity Using Homodyne Photo Detection TechniqueHarsha M VNo ratings yet
- Spiral Logarithmic AntennaDocument8 pagesSpiral Logarithmic Antennamarcosnt66No ratings yet
- High-Resolution Doppler Lidar For Boundary Layer and Cloud ResearchDocument18 pagesHigh-Resolution Doppler Lidar For Boundary Layer and Cloud ResearchJeferson Tondo AlvesNo ratings yet
- Gyroscope Technologies For Space Applications: Armenise@poliba - ItDocument26 pagesGyroscope Technologies For Space Applications: Armenise@poliba - ItAhmed HamoudaNo ratings yet
- Recent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaDocument43 pagesRecent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaSteveAbonyiNo ratings yet
- ALADIN Laser Frequency Stability and Its Impact OnDocument29 pagesALADIN Laser Frequency Stability and Its Impact On夕何No ratings yet
- Spacecraft Reflector AntennasDocument10 pagesSpacecraft Reflector AntennasRobert GrubeNo ratings yet
- 2023 - Tang at Enhancing Faraday and Kerr Rotations Based On The Toroidal Dipole Mode in An All-Dielectric Magneto-Optical MetasurfaceDocument4 pages2023 - Tang at Enhancing Faraday and Kerr Rotations Based On The Toroidal Dipole Mode in An All-Dielectric Magneto-Optical MetasurfaceRodrigo PaivaNo ratings yet
- 2012 - Kocakarin, Yegin - Surface Plasmon-Enhanced Nanoantenna For Localized Fluorescence - International Journal of Antennas and PropagDocument8 pages2012 - Kocakarin, Yegin - Surface Plasmon-Enhanced Nanoantenna For Localized Fluorescence - International Journal of Antennas and PropagClaudio BiaginiNo ratings yet
- A Phased-Array Radar For Weather Research and EducationDocument4 pagesA Phased-Array Radar For Weather Research and EducationShakeer SoudagarNo ratings yet
- Chris D. Boone Et Al - Retrievals For The Atmospheric Chemistry Experiment Fourier-Transform SpectrometerDocument14 pagesChris D. Boone Et Al - Retrievals For The Atmospheric Chemistry Experiment Fourier-Transform SpectrometerRemazzzNo ratings yet
- A Logarithmic Spiral Antenna For 0.4 To 3.8 GHZDocument8 pagesA Logarithmic Spiral Antenna For 0.4 To 3.8 GHZStephan CarterNo ratings yet
- Unit 6 - PhotodetectorsDocument74 pagesUnit 6 - PhotodetectorsSarthak KumarNo ratings yet
- RFC ReviewDocument21 pagesRFC ReviewAli KarimianNo ratings yet
- 1 s2.0 S0011227508001124 MainDocument6 pages1 s2.0 S0011227508001124 MainRev TamasNo ratings yet
- Kim-Quantum-correlation-based Free-Space Optical Link With An Active Reflector-2022-Current Applied PhysicsDocument7 pagesKim-Quantum-correlation-based Free-Space Optical Link With An Active Reflector-2022-Current Applied Physicskimjinhun1124No ratings yet
- The Atacama Large Millimeter Array (Alma) A Next Generation Radio TelescopeDocument4 pagesThe Atacama Large Millimeter Array (Alma) A Next Generation Radio TelescopethanhNo ratings yet
- 20 Years of Developments in Optical Frequency Comb Technology and ApplicationsDocument16 pages20 Years of Developments in Optical Frequency Comb Technology and ApplicationsAbhishek Kumar MahatoNo ratings yet
- Time-Frequency Analysis of Backscattered Lidar Signal To Study Atmosphere DynamicsDocument3 pagesTime-Frequency Analysis of Backscattered Lidar Signal To Study Atmosphere DynamicsPiyush ßlâçklîstëdNo ratings yet
- Broadly Tunable Infrared Parametric Oscillator Using Aggase2Document4 pagesBroadly Tunable Infrared Parametric Oscillator Using Aggase2singht611No ratings yet
- Review of Related LiteratureDocument3 pagesReview of Related Literaturemgoldiieeee100% (1)
- Anomalous PropagationDocument26 pagesAnomalous PropagationmanjitkamalNo ratings yet
- X-Ray and VUV Spectra From The Laser Plasma Produced With "Kanal-2" FacilityDocument6 pagesX-Ray and VUV Spectra From The Laser Plasma Produced With "Kanal-2" FacilitytsrifNo ratings yet
- A Compact Radio Telescope For The 21CM Neutral-Hydrogen LineDocument31 pagesA Compact Radio Telescope For The 21CM Neutral-Hydrogen LineMartin Baqueiro100% (1)
- Rosenzweig 1997 0179Document3 pagesRosenzweig 1997 0179Particle Beam Physics LabNo ratings yet
- NovelDocument13 pagesNovelWahyuning LestariNo ratings yet
- Windows 10 Activator2018 - v0.3Document18 pagesWindows 10 Activator2018 - v0.3G srinivasNo ratings yet
- Optica 5 2 175 PDFDocument5 pagesOptica 5 2 175 PDFLoubnanNo ratings yet
- Ferrario 2005 658Document5 pagesFerrario 2005 658Particle Beam Physics LabNo ratings yet
- Dept & Sem: Subject Name: Course Code: Unit: Prepared byDocument17 pagesDept & Sem: Subject Name: Course Code: Unit: Prepared bySureshbabu PNo ratings yet
- Models - Woptics.step Index Fiber BendDocument24 pagesModels - Woptics.step Index Fiber BendMoti Ben LaishNo ratings yet
- Zhang 1993 0246Document5 pagesZhang 1993 0246Particle Beam Physics LabNo ratings yet
- Tunable High-Finesse Narrow Bandpass Fabry - Perot Filter: V.B. Markov, A.I. Khizhnyak, V. Goren, W.B. CookDocument9 pagesTunable High-Finesse Narrow Bandpass Fabry - Perot Filter: V.B. Markov, A.I. Khizhnyak, V. Goren, W.B. CookSoumajit MajumderNo ratings yet
- Near Field To Far Field Transformation by Asymptotic Evaluation of Aperture Radiation FieldDocument5 pagesNear Field To Far Field Transformation by Asymptotic Evaluation of Aperture Radiation FieldSatyabrata MaitiNo ratings yet
- (Reprint From Handbuch Der Physik - Encyclopedia of Physics) R. N. Bracewell (Auth.) - Radio Astronomy Techniques-Springer-Verlag Berlin Heidelberg (1962)Document91 pages(Reprint From Handbuch Der Physik - Encyclopedia of Physics) R. N. Bracewell (Auth.) - Radio Astronomy Techniques-Springer-Verlag Berlin Heidelberg (1962)garfacio30No ratings yet
- Zhadnov Et Al. - 2018 - On The Thermal Noise Limit of Ultrastable Optical CavitiesDocument6 pagesZhadnov Et Al. - 2018 - On The Thermal Noise Limit of Ultrastable Optical CavitiesNikita ZhadnovNo ratings yet
- Parameter Selection Procedure of Parabolic Reflector Antenna For The Optimum Synthetic Aperture Radar PerformancesDocument8 pagesParameter Selection Procedure of Parabolic Reflector Antenna For The Optimum Synthetic Aperture Radar PerformancesMohammed MansurNo ratings yet
- MilkywayDocument70 pagesMilkywaykatyani guptaNo ratings yet
- GPR ProcessingDocument23 pagesGPR Processingnaivedya_mishraNo ratings yet
- Acp 10 2079 2010Document11 pagesAcp 10 2079 2010Amaechi InnocentNo ratings yet
- Fiber GyroDocument5 pagesFiber GyroDanny DeWittNo ratings yet
- 144kmFreeSpace Distribution of EntanglementDocument10 pages144kmFreeSpace Distribution of EntanglementpruevaNo ratings yet
- Operation of Single-Walled Carbon Nanotube As A Radio-Frequency Single-Electron TransistorDocument5 pagesOperation of Single-Walled Carbon Nanotube As A Radio-Frequency Single-Electron TransistorNisha AgrawalNo ratings yet
- Infrared Detectors: Papers Presented at a Meeting of the U.S. Speciality Group on Infrared DetectorsFrom EverandInfrared Detectors: Papers Presented at a Meeting of the U.S. Speciality Group on Infrared DetectorsRating: 1 out of 5 stars1/5 (1)
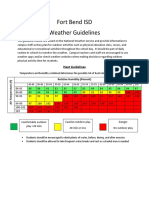
- Fort Bend ISD Weather GuidelinesDocument4 pagesFort Bend ISD Weather GuidelinesBrien JeffersonNo ratings yet
- Orca Share Media1667550660664 6994214406226372756Document5 pagesOrca Share Media1667550660664 6994214406226372756Cyrus DestajoNo ratings yet
- Current Affairs 1Document28 pagesCurrent Affairs 1Jameel Ahamed J ANo ratings yet
- Air Pollution Dispersion Modeling PDFDocument6 pagesAir Pollution Dispersion Modeling PDFadcaNo ratings yet
- Lightning Arrester: Arrestor) (Also Called Lightning Diverter) Is A Device UsedDocument4 pagesLightning Arrester: Arrestor) (Also Called Lightning Diverter) Is A Device UsedSanjaybsNo ratings yet
- General Wave Properties 4 QPDocument8 pagesGeneral Wave Properties 4 QPAli SiddiqNo ratings yet
- Catalogue CmemsDocument40 pagesCatalogue CmemsAgung PratamaNo ratings yet
- Vocabulary List 104: Unit 3 Unit 4Document4 pagesVocabulary List 104: Unit 3 Unit 4Abdulmalik AlawadhiNo ratings yet
- BDDocument3,102 pagesBDtedy yidegNo ratings yet
- Fill in The Blanks.: Solar SystemDocument3 pagesFill in The Blanks.: Solar SystemfahadNo ratings yet
- SOHsgd Advisory 119revisedDocument2 pagesSOHsgd Advisory 119revisedjohn dave rougel ManzanoNo ratings yet
- TC Material - 632Document1 pageTC Material - 632Mouse LALANo ratings yet
- Form 2 19 Sound WavesDocument32 pagesForm 2 19 Sound WavesMAGDALENE MWANGANGINo ratings yet
- Automotive Water Pump PDFDocument2 pagesAutomotive Water Pump PDFPrakhar AggarwalNo ratings yet
- Legends of The Yellow RiverDocument1 pageLegends of The Yellow RiverAgnes TungNo ratings yet
- Gregorian-Lunar Calendar Conversion Table of 1982 (Ren-Xu - Year of The Dog)Document1 pageGregorian-Lunar Calendar Conversion Table of 1982 (Ren-Xu - Year of The Dog)Hina RazaNo ratings yet
- GDL 30/30A: Marine Weather Satellite Receiver Owner's ManualDocument38 pagesGDL 30/30A: Marine Weather Satellite Receiver Owner's ManualKumaraswamy RSNo ratings yet
- Propeller Strike, Motor Do CARAVAN PT6A-114ADocument3 pagesPropeller Strike, Motor Do CARAVAN PT6A-114AVagner OliveiraNo ratings yet
- Modelling of Dry Lightning Impulse Test On 145 KV Oil Impregnated Paper Bushing For High Voltage TransformerDocument6 pagesModelling of Dry Lightning Impulse Test On 145 KV Oil Impregnated Paper Bushing For High Voltage TransformerFaridah HassanNo ratings yet
- Cardamom CultivationDocument6 pagesCardamom CultivationNuur Yusuf Sheikh OmarNo ratings yet
- Effects of Soil ErosionDocument6 pagesEffects of Soil Erosionchristian capunongNo ratings yet
- Ipcc Ar6 Wgi Chapter 12Document240 pagesIpcc Ar6 Wgi Chapter 12hzamiNo ratings yet