You might also like
- System Assurances: Modeling and ManagementFrom EverandSystem Assurances: Modeling and ManagementPrashant JohriNo ratings yet
- Eso208 Tutorial SolutionDocument10 pagesEso208 Tutorial SolutionyhjklNo ratings yet
- Problem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Document3 pagesProblem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Francisco SáenzNo ratings yet
- Prob Cost DegenDocument2 pagesProb Cost DegenNikhil ChapleNo ratings yet
- Managerial EconomicsDocument3 pagesManagerial EconomicsWajahat AliNo ratings yet
- LU7 - Unconstrained and Constrained Optimization Lagrange MultiplierDocument19 pagesLU7 - Unconstrained and Constrained Optimization Lagrange MultiplierBadrul HyungNo ratings yet
- AITS-2014-CRT-I-JEEM+ADV Advanced PAPER-1 Solutions ANSWER SOLUTION PDFDocument11 pagesAITS-2014-CRT-I-JEEM+ADV Advanced PAPER-1 Solutions ANSWER SOLUTION PDFDushyant SinghNo ratings yet
- Exam Advanced Linear Programming, May 14, 13.30-16.30Document4 pagesExam Advanced Linear Programming, May 14, 13.30-16.30tequesta95No ratings yet
- 3.1 Solved Problem Set PDFDocument30 pages3.1 Solved Problem Set PDFmrtcn100% (1)
- MBA-105 Question PaperDocument9 pagesMBA-105 Question PaperTushar JaiswalNo ratings yet
- Lec 24 Lagrange MultiplierDocument20 pagesLec 24 Lagrange MultiplierMuhammad Bilal JunaidNo ratings yet
- D1, L9 Solving Linear Programming ProblemsDocument16 pagesD1, L9 Solving Linear Programming ProblemsmokhtarppgNo ratings yet
- Introduction To Spreadsheets Key Stage 2 / Form 1Document38 pagesIntroduction To Spreadsheets Key Stage 2 / Form 1bAxTErNo ratings yet
- Lecture W3 1Document25 pagesLecture W3 1aniketkaushikNo ratings yet
- Dynamic Programming Rod or Pole Cutting ProblemDocument17 pagesDynamic Programming Rod or Pole Cutting ProblemAbhishek karwalNo ratings yet
- Complex Numbers FormulasDocument1 pageComplex Numbers FormulasArslanZafarNo ratings yet
- CLUSTER ANALYSIS DevashishDocument4 pagesCLUSTER ANALYSIS DevashishRaman KulkarniNo ratings yet
- The Inclusion-Exclusion Principle: Problem 1Document14 pagesThe Inclusion-Exclusion Principle: Problem 1parasNo ratings yet
- Blooms TaxonomyDocument1 pageBlooms TaxonomyJoshua KumaresanNo ratings yet
- Bubt STA231 Mid Term Question Summer 2021Document2 pagesBubt STA231 Mid Term Question Summer 2021Mustafizur Rahman RafeeNo ratings yet
- Chapter 12H - Behind The Supply Curve - Inputs and Costs PDFDocument15 pagesChapter 12H - Behind The Supply Curve - Inputs and Costs PDFsubrat sarangiNo ratings yet
- Digital Logic FPGA Lab ManualDocument35 pagesDigital Logic FPGA Lab ManualBilal RajaNo ratings yet
- OR PPT On AssignmentDocument20 pagesOR PPT On AssignmentjanakNo ratings yet
- Section 2.8Document3 pagesSection 2.8thermopolis3012No ratings yet
- Calculus 2 - Increments and DifferentialsDocument6 pagesCalculus 2 - Increments and DifferentialsAyie KhairieNo ratings yet
- Practice - Permutations and Combinations Problems - Ncert Chapter 7 Solutions Part - 50 SolutionsDocument14 pagesPractice - Permutations and Combinations Problems - Ncert Chapter 7 Solutions Part - 50 Solutionsalroy dcruzNo ratings yet
- Solution Question 2 Quiz 2005 PDFDocument3 pagesSolution Question 2 Quiz 2005 PDFsaurabhsaurs100% (1)
- CH 2 Linear Programming in SpreadsheetsDocument63 pagesCH 2 Linear Programming in SpreadsheetsBilalNo ratings yet
- Alpha Chiang Chapter 19Document10 pagesAlpha Chiang Chapter 19ansarabbasNo ratings yet
- BCS302 Set 2Document2 pagesBCS302 Set 2megumifushiguru999No ratings yet
- 5.trigonometry at A Glance 1Document1 page5.trigonometry at A Glance 1vamshiNo ratings yet
- Question Paper For Class 12 PhysicsDocument5 pagesQuestion Paper For Class 12 PhysicsShubham AsthanaNo ratings yet
- Reverse Engineering ReportDocument18 pagesReverse Engineering Reportapi-302340711No ratings yet
- Answers To Summer 2010 Perfect Competition QuestionsDocument7 pagesAnswers To Summer 2010 Perfect Competition QuestionsNikhil Darak100% (1)
- CADMDocument3 pagesCADMSaravana Kumar MNo ratings yet
- Test 2Document40 pagesTest 2Prasanth KandregulaNo ratings yet
- Modern Control Technology Components & Systems (2nd Ed.)Document2 pagesModern Control Technology Components & Systems (2nd Ed.)musarraf172No ratings yet
- Economy Compilation Forum IAS PDFDocument62 pagesEconomy Compilation Forum IAS PDFKOTTE SAIKIRANNo ratings yet
- Linear Models and Matrix Algebra: Alpha Chiang, Fundamental Methods of Mathematical Economics 3 EditionDocument32 pagesLinear Models and Matrix Algebra: Alpha Chiang, Fundamental Methods of Mathematical Economics 3 EditionAman AthwalNo ratings yet
- University Solved Answers Unit 1 SS (System Software Notes)Document12 pagesUniversity Solved Answers Unit 1 SS (System Software Notes)Vaishnavi Rave100% (1)
- Allied MathematicsDocument9 pagesAllied MathematicsJananiNo ratings yet
- Solution For The Laplace EquationDocument10 pagesSolution For The Laplace Equationapi-3839714No ratings yet
- Face Prep TCS-Ninja Slot Analysis 14th Sep 2021 Slot 1Document27 pagesFace Prep TCS-Ninja Slot Analysis 14th Sep 2021 Slot 1Vishal ChoudharyNo ratings yet
- 5 Yr Integrated M.Tech in Mathematics and Computing Course Structure IIT DhanbadDocument44 pages5 Yr Integrated M.Tech in Mathematics and Computing Course Structure IIT DhanbadAman VermaNo ratings yet
- My Project PDFDocument27 pagesMy Project PDFShabeehaNo ratings yet
- Application of A Simplex Method To Find The Optimal SolutionDocument4 pagesApplication of A Simplex Method To Find The Optimal SolutionInternational Journal of Innovations in Engineering and Science100% (1)
- Chapter 10 CurvesDocument49 pagesChapter 10 CurvesAmit DostNo ratings yet
- Graphical Method and Simplex MethodDocument61 pagesGraphical Method and Simplex MethodKaushik Reddy100% (1)
- Linear Programming: Optimization), Comparative Statics, and Dynamics, Let Us Return To The Problem ofDocument40 pagesLinear Programming: Optimization), Comparative Statics, and Dynamics, Let Us Return To The Problem ofansarabbasNo ratings yet
- 177 Studymat 2 Final Morning SolutionDocument8 pages177 Studymat 2 Final Morning SolutionsenthilprabhumkNo ratings yet
- MS (Integer Programming)Document103 pagesMS (Integer Programming)Anirban GhoshNo ratings yet
- A Company Has Purchased A Bus For Its Officers ForDocument2 pagesA Company Has Purchased A Bus For Its Officers ForNiamatullah WazirNo ratings yet
- Assignement 1Document4 pagesAssignement 1devesha9100% (1)
- PDFDocument38 pagesPDFshady boyNo ratings yet
- CL 603 - Course HandoutDocument2 pagesCL 603 - Course HandoutwelcometoankitNo ratings yet
- QT - Unit 1Document14 pagesQT - Unit 1aakanksha2693No ratings yet
- Digital Logic MCQ - Digital Logic Questions Answers - Avatto-Page6Document2 pagesDigital Logic MCQ - Digital Logic Questions Answers - Avatto-Page6Kuldeep KushwahaNo ratings yet
- GATE Questions Book - Final-Watermark (1) .pdf-34 PDFDocument115 pagesGATE Questions Book - Final-Watermark (1) .pdf-34 PDFTinku King100% (1)
- CSE 331 - Final - Assignment - v2Document5 pagesCSE 331 - Final - Assignment - v2S.M. Imam Jahed Hossain 1511500642No ratings yet
- Assignment 1Document26 pagesAssignment 1SAURAV kumarNo ratings yet
- Falling Head Permeability Test Lab ManualDocument3 pagesFalling Head Permeability Test Lab Manualmm0% (1)
- Blue and Green Modern Minimalist Marketing Strategy PresentationDocument19 pagesBlue and Green Modern Minimalist Marketing Strategy PresentationSAURAV kumarNo ratings yet
- Y20 PHY102 EndsemDocument28 pagesY20 PHY102 EndsemSAURAV kumarNo ratings yet
- Y20 Phy102 EsDocument28 pagesY20 Phy102 EsSAURAV kumarNo ratings yet
- Ananya Cisco Networking Academy Coures ListDocument8 pagesAnanya Cisco Networking Academy Coures ListSAURAV kumarNo ratings yet
- Sample Paper ASAT X PDFDocument17 pagesSample Paper ASAT X PDFanurag680% (1)
- Phy102Aa: Physics-I Users Online: 8: L = 1 θ = e r V (r) r = 1Document3 pagesPhy102Aa: Physics-I Users Online: 8: L = 1 θ = e r V (r) r = 1SAURAV kumarNo ratings yet
- Tutorial Sheet 6: Indian Institute of Technology KanpurDocument1 pageTutorial Sheet 6: Indian Institute of Technology KanpurSAURAV kumarNo ratings yet
- JEE Advanced Toppers 2019Document3 pagesJEE Advanced Toppers 2019Mahesh SriramulaNo ratings yet
- Nrdelhi PDFDocument1 pageNrdelhi PDFSAURAV kumarNo ratings yet
- JEE Advanced Toppers 2019Document3 pagesJEE Advanced Toppers 2019Mahesh SriramulaNo ratings yet
- Phase TEST-1 Phase TEST-1: Date / DayDocument17 pagesPhase TEST-1 Phase TEST-1: Date / DayAnonymous gmFQDKs0kANo ratings yet
- Time Table 25 30 June 2019Document16 pagesTime Table 25 30 June 2019Narayan SubramanianNo ratings yet
- Monthly Assessment Test Resultfor Batch Sankalp820lotheld On 28th June 2019Document8 pagesMonthly Assessment Test Resultfor Batch Sankalp820lotheld On 28th June 2019SAURAV kumarNo ratings yet
- Time Table 25 30 June 2019Document16 pagesTime Table 25 30 June 2019Narayan SubramanianNo ratings yet
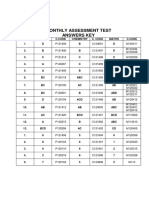
- Monthly Assessment Test Answers KeyDocument1 pageMonthly Assessment Test Answers KeySAURAV kumarNo ratings yet
- Sol. Sameer Bansal PDFDocument433 pagesSol. Sameer Bansal PDFSAURAV kumar73% (73)
- 1300 Math Formulas - Alex SvirinDocument338 pages1300 Math Formulas - Alex SvirinMirnesNo ratings yet
- Aits 1718 CRT I Jeea Paper 1Document19 pagesAits 1718 CRT I Jeea Paper 1SAURAV kumar100% (1)
- Conventional Smoke Detector OT101 PDFDocument2 pagesConventional Smoke Detector OT101 PDFAgustín CatramadoNo ratings yet
- Kelompok 4Document75 pagesKelompok 4Vanny SafrinaNo ratings yet
- BPI m1 DatasheetDocument97 pagesBPI m1 DatasheetIlhamHamiddinNo ratings yet
- Smart City Project ModulesDocument3 pagesSmart City Project Modulesdeepika balichwal0% (1)
- 4307 Dcap405 Software Engineering PDFDocument258 pages4307 Dcap405 Software Engineering PDFIsha Mehra100% (1)
- On IOT TOOLDocument20 pagesOn IOT TOOLFarhan AhmadNo ratings yet
- CH 01Document23 pagesCH 01Karan MadaanNo ratings yet
- Data Warehousing: Caselet: University Health System-BI in Health CareDocument8 pagesData Warehousing: Caselet: University Health System-BI in Health CareDAnielNo ratings yet
- Characteristics of A ProductDocument8 pagesCharacteristics of A ProductCamilo OrtegonNo ratings yet
- Service Manual: Finisher, Sorter, Deliverytray Buffer Pass Unit-E1Document16 pagesService Manual: Finisher, Sorter, Deliverytray Buffer Pass Unit-E1ANDY BNo ratings yet
- Asynchronous GeneratorDocument16 pagesAsynchronous GeneratorsalmanassriNo ratings yet
- CM RolesDocument2 pagesCM RolesFrancis Leo MagalpukeNo ratings yet
- Diaphragm Operated Two-Way Valves - Series 418, Ductile Body and Series 420, Steel BodyDocument4 pagesDiaphragm Operated Two-Way Valves - Series 418, Ductile Body and Series 420, Steel BodyDaniel ArgumedoNo ratings yet
- Zeenea What Is A Smart Data CatalogDocument39 pagesZeenea What Is A Smart Data CatalogAnantha RamanNo ratings yet
- Ci10049lDocument2 pagesCi10049lHương TrầnNo ratings yet
- Resume Venu (1) Sfdaf (1) LatestDocument2 pagesResume Venu (1) Sfdaf (1) LatestVijayPapineniNo ratings yet
- Lab DHCP ConfigDocument10 pagesLab DHCP ConfigTrần Trọng NhânNo ratings yet
- CelFi Repeater SpecificationsDocument2 pagesCelFi Repeater Specificationsbluebird1969No ratings yet
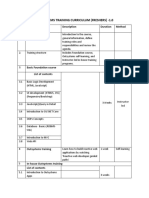
- Outsystems Training Curriculum (Freshers)Document3 pagesOutsystems Training Curriculum (Freshers)Chethan BkNo ratings yet
- Handout - Grade 7 - ICT - Parts of A Computer PDFDocument0 pagesHandout - Grade 7 - ICT - Parts of A Computer PDFRodsil Czar Palma Sacmar100% (4)
- Accounting Information Systems in The Blockchain EraDocument18 pagesAccounting Information Systems in The Blockchain EraTumbal PogoNo ratings yet
- ECZ Computer Studies P1 Past Paper 2015 2016 2017Document65 pagesECZ Computer Studies P1 Past Paper 2015 2016 2017Bricious Mulimbi100% (1)
- Nuclear Accidents and HolocaustDocument19 pagesNuclear Accidents and HolocaustSurendra RanwaNo ratings yet
- The Authoritative Dictionary of IEEE Terms ML12089A535Document4 pagesThe Authoritative Dictionary of IEEE Terms ML12089A535sebastiannistorNo ratings yet
- Office ANK SB 15205Document21 pagesOffice ANK SB 15205Donoghue Cherbury Laurence-BenedictNo ratings yet
- Super ElfDocument56 pagesSuper ElfbillybobwackadooNo ratings yet
- Onair2 HTML Instructions: Structure of The ProjectDocument2 pagesOnair2 HTML Instructions: Structure of The ProjectSubash DNo ratings yet
- AWSome Day - EN 1Document41 pagesAWSome Day - EN 1Shad SaleemNo ratings yet
- McKinsey Global InstituteDocument30 pagesMcKinsey Global InstitutetiffunnyNo ratings yet
- Catalogo EMC 2008 EngDocument234 pagesCatalogo EMC 2008 EngpepeNo ratings yet