You might also like
- Angle Modulation NotesDocument88 pagesAngle Modulation Notesareebarajpoot0453879100% (1)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
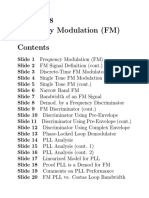
- Notes 08Document16 pagesNotes 08balkyderNo ratings yet
- Angle Modulation and DemodulationDocument49 pagesAngle Modulation and DemodulationAbdulaziz Al-ShammariNo ratings yet
- Reference: Communication Systems-Simon Haykin (2001)Document33 pagesReference: Communication Systems-Simon Haykin (2001)Mariella Dela CruzNo ratings yet
- EE1 and ISE1 Communications I: Pier Luigi Dragotti Lecture TwelveDocument11 pagesEE1 and ISE1 Communications I: Pier Luigi Dragotti Lecture TwelveashokkumarNo ratings yet
- b3 Angle Modulation - Comm TheoremDocument83 pagesb3 Angle Modulation - Comm Theoremhafiz azmanNo ratings yet
- Chapter 4 Frequency ModulationDocument88 pagesChapter 4 Frequency ModulationtestNo ratings yet
- ch8 PDFDocument32 pagesch8 PDFJohn Carlo SacramentoNo ratings yet
- Angle ModulationDocument19 pagesAngle Modulationkibrom atsbhaNo ratings yet
- Angle ModulationDocument34 pagesAngle ModulationSanjana PulapaNo ratings yet
- Angle Modulation Tutorial 1Document23 pagesAngle Modulation Tutorial 1Haider Al RikabiNo ratings yet
- Analog Communication Systems IDocument64 pagesAnalog Communication Systems Itadepeace23No ratings yet
- Continuous Wave Modulation: Baseband Signal Message Modulated WaveformDocument18 pagesContinuous Wave Modulation: Baseband Signal Message Modulated WaveformMnshNo ratings yet
- Woldia University: Institute of Technology School of Electrical and Computer Engineering Chapter ThreeDocument29 pagesWoldia University: Institute of Technology School of Electrical and Computer Engineering Chapter ThreemulusewNo ratings yet
- Comparison Frequency Modulation and Phase ModulationDocument13 pagesComparison Frequency Modulation and Phase ModulationAMIT KUMAR SINGHNo ratings yet
- Chapter 4Document60 pagesChapter 4pramit palNo ratings yet
- Course Notes AM Ch4Document34 pagesCourse Notes AM Ch4Damien MirindiNo ratings yet
- Comsysf311 2223 L13Document13 pagesComsysf311 2223 L13Gandhi SaxosNo ratings yet
- Lecture Slides - Week-06 Angle Modulation PDFDocument14 pagesLecture Slides - Week-06 Angle Modulation PDFRakhmeen gulNo ratings yet
- Chapter 4-Angle Modulation and DemodulationDocument48 pagesChapter 4-Angle Modulation and DemodulationElias HedamoNo ratings yet
- s (t) =A t +2 π k m (t) dt)Document2 pagess (t) =A t +2 π k m (t) dt)Gopolang Jerome TaeyeleNo ratings yet
- lecture-3Document37 pageslecture-3Kirubel MulugetaNo ratings yet
- Freqency Modulation - 3rd P&M - 2019-2020Document7 pagesFreqency Modulation - 3rd P&M - 2019-2020حسن علي جاسمNo ratings yet
- PCS LabDocument8 pagesPCS LabSaadat KhanNo ratings yet
- Unit-Iv Angle ModulationDocument2 pagesUnit-Iv Angle ModulationhimeshemraanNo ratings yet
- Analog Modulation: Part Ii: Angle ModulationDocument76 pagesAnalog Modulation: Part Ii: Angle ModulationkNo ratings yet
- EEE 107 Lecture 7 - Angle CW ModulationDocument47 pagesEEE 107 Lecture 7 - Angle CW Modulation許耕立No ratings yet
- Lecture12 13 Angle PDFDocument47 pagesLecture12 13 Angle PDFزوہیب محمودNo ratings yet
- Questoes AMDocument7 pagesQuestoes AMDaniel Costa AraújoNo ratings yet
- 2.1 FM Intro-Mm PDFDocument57 pages2.1 FM Intro-Mm PDFHussin AhmedNo ratings yet
- MIT 6.003 Signals and Systems Lecture on Amplitude ModulationDocument5 pagesMIT 6.003 Signals and Systems Lecture on Amplitude ModulationIsrael SmithNo ratings yet
- HW3 Soru5 6Document5 pagesHW3 Soru5 6Rıdvan BalamurNo ratings yet
- AM Modulation and Demodulation SimulationDocument4 pagesAM Modulation and Demodulation SimulationasiffarookiNo ratings yet
- Angular Modulation ContextDocument34 pagesAngular Modulation Contextpython3No ratings yet
- 3 Frequency Modulation: High Amplitude High FrequencyDocument25 pages3 Frequency Modulation: High Amplitude High Frequencyram_786No ratings yet
- AnglemodulationDocument49 pagesAnglemodulationSatyendra VishwakarmaNo ratings yet
- Tushar Kant SC21B125 L24 ScribeDocument5 pagesTushar Kant SC21B125 L24 ScribeUtkarsh UtsavNo ratings yet
- Chap2 - AM-part IDocument56 pagesChap2 - AM-part Iyamen.nasser7No ratings yet
- Angle Modulation GuideDocument54 pagesAngle Modulation GuideJan Nicholas TeorimaNo ratings yet
- Handout 7: Phase and Frequency ModulationDocument7 pagesHandout 7: Phase and Frequency ModulationRajurajiNo ratings yet
- Dr. Zafar (BITS Pilani): Angle Modulation BWDocument14 pagesDr. Zafar (BITS Pilani): Angle Modulation BWGandhi SaxosNo ratings yet
- AM, FM and Digital Modulated SystemsDocument63 pagesAM, FM and Digital Modulated SystemsmaxamedNo ratings yet
- Angle ModulationDocument52 pagesAngle ModulationkshitijNo ratings yet
- Chapter 3: FM Modulation: Modulation in Which The Angle of The Carrier Wave Is Varied According To The Base-BandDocument33 pagesChapter 3: FM Modulation: Modulation in Which The Angle of The Carrier Wave Is Varied According To The Base-Bandtadepeace23No ratings yet
- Analog Communication Exam Paper T2 PDFDocument7 pagesAnalog Communication Exam Paper T2 PDFvavaNo ratings yet
- Unit 2 CTDocument27 pagesUnit 2 CTS PSNo ratings yet
- Angle Modulation: Properties, Types, Spectrum & ImplementationDocument15 pagesAngle Modulation: Properties, Types, Spectrum & ImplementationSamuel AdamuNo ratings yet
- Kuliah 2c Siskom FM PMDocument4 pagesKuliah 2c Siskom FM PMPahala SamosirNo ratings yet
- Angle Modulation Lecture III: FM Demodulation and Pre-EmphasisDocument17 pagesAngle Modulation Lecture III: FM Demodulation and Pre-EmphasisbalkyderNo ratings yet
- Mar 8 THDocument4 pagesMar 8 THEce SudhagarNo ratings yet
- Reference: - Chapter 5.1, Carlson, Communication SystemsDocument15 pagesReference: - Chapter 5.1, Carlson, Communication SystemsFelipe CapchaNo ratings yet
- HW 5Document2 pagesHW 5milad_7410No ratings yet
- Chapter 5Document23 pagesChapter 5Anil RaiNo ratings yet
- Silicon Labs FM TutorialDocument12 pagesSilicon Labs FM TutorialAbbas Bagherifar100% (1)
- pcshw3 SolnDocument6 pagespcshw3 SolnBhuvaneshwari BNo ratings yet
- Frequency Modulation: DT T M K T FDocument2 pagesFrequency Modulation: DT T M K T FhimeshemraanNo ratings yet
- Angle ModulationDocument12 pagesAngle ModulationMompati LetsweletseNo ratings yet
- Dynamic Resource Provisioning in Massively Multiplayer Online CasinoDocument16 pagesDynamic Resource Provisioning in Massively Multiplayer Online CasinoCollinsNo ratings yet
- FSCUT8000 Installation User Manual V1.5 1Document67 pagesFSCUT8000 Installation User Manual V1.5 1Yekta TecirNo ratings yet
- Working With TimeDocument76 pagesWorking With TimesplkmodeNo ratings yet
- Deploying Avaya Call Management System in An Avaya Customer Experience Virtualized EnvironmentDocument44 pagesDeploying Avaya Call Management System in An Avaya Customer Experience Virtualized EnvironmentJuan Carlos FernandezNo ratings yet
- PSCAD and EMTDC Hot Fix (v4.5.3)Document20 pagesPSCAD and EMTDC Hot Fix (v4.5.3)Mohaned Kamal HassanNo ratings yet
- Section 1: CorrectDocument10 pagesSection 1: CorrectmisbahulNo ratings yet
- Test Dynamics GP 2013 Installation GuideDocument28 pagesTest Dynamics GP 2013 Installation GuideJEFF WONNo ratings yet
- VMix Control Panel Manual - EMDocument23 pagesVMix Control Panel Manual - EMRicardo ArevaloNo ratings yet
- DBMS Lab Hotel Management SystemDocument4 pagesDBMS Lab Hotel Management SystemHarshitha nNo ratings yet
- Warranty Period Product ListDocument6 pagesWarranty Period Product ListSameer Abu-AnnadiNo ratings yet
- Orionlx™ Automation Platform: Hardware FeaturesDocument2 pagesOrionlx™ Automation Platform: Hardware FeaturesMelchor VasquezNo ratings yet
- New Level 6 Mit App Inventor Image Puzzle AppDocument52 pagesNew Level 6 Mit App Inventor Image Puzzle AppRanjan ZambareNo ratings yet
- AVEVA Licensing System 4.1 User GuideDocument62 pagesAVEVA Licensing System 4.1 User GuideHamidReza GholamianNo ratings yet
- 469 Manual (v5.0x GEK-106474D)Document264 pages469 Manual (v5.0x GEK-106474D)DAS1300No ratings yet
- A Systematic Literature Review On QoS-aware Service Composition and Selection in Cloud EnvironmentDocument23 pagesA Systematic Literature Review On QoS-aware Service Composition and Selection in Cloud EnvironmentbejowatukNo ratings yet
- Data Representation and Numbering SystemsDocument28 pagesData Representation and Numbering SystemsMisnomerNo ratings yet
- MCP33131/21/11-XX: 1 Msps/500 KSPS 16/14/12-Bit Single-Ended Input SAR ADCDocument54 pagesMCP33131/21/11-XX: 1 Msps/500 KSPS 16/14/12-Bit Single-Ended Input SAR ADCtrival001No ratings yet
- Firewall Check ListDocument7 pagesFirewall Check Listabcdef ghijkNo ratings yet
- E-Tech - 1st QEDocument4 pagesE-Tech - 1st QELEMUEL CASTILLONo ratings yet
- JDBCDocument11 pagesJDBCAnshu PriyaNo ratings yet
- A/d A/d: 8769agndDocument1 pageA/d A/d: 8769agndVioNo ratings yet
- 8259A Programmable Interrupt Controller: Segment 8BDocument31 pages8259A Programmable Interrupt Controller: Segment 8Bgebretensaymamu11No ratings yet
- Item 3.2 - E560 - AA21 - DSDocument6 pagesItem 3.2 - E560 - AA21 - DSTiennghia BuiNo ratings yet
- MIPS Report FileDocument17 pagesMIPS Report FileAayushiNo ratings yet
- Algoritmo de YenDocument6 pagesAlgoritmo de Yenromano7187No ratings yet
- Line Drawing Algorithms: by Virendra Singh KushwahDocument18 pagesLine Drawing Algorithms: by Virendra Singh KushwahvirendrakushwahNo ratings yet
- Wireless and Mobile Network ArchitectureDocument592 pagesWireless and Mobile Network ArchitectureMadhuri DesaiNo ratings yet
- BB 6630 AlarmsDocument24 pagesBB 6630 Alarmsivan hary4No ratings yet
- Poly Trio 8300 A Guide To SellDocument4 pagesPoly Trio 8300 A Guide To SellSchool PracticeNo ratings yet
- Art Gallery SynopsisDocument5 pagesArt Gallery SynopsisMaheshNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- AWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistFrom EverandAWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistNo ratings yet
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)