You might also like
- CRACK Wondershare DrFone v101025 Final Crack PDFDocument3 pagesCRACK Wondershare DrFone v101025 Final Crack PDFMariaNo ratings yet
- Test Translation: Test: Manufacturing - Industrial Machinery 370 Words Name: First LanguageDocument4 pagesTest Translation: Test: Manufacturing - Industrial Machinery 370 Words Name: First LanguagePervane KerimovaNo ratings yet
- Manual 166169Document45 pagesManual 166169Cristian Garcia100% (1)
- Ultrasonic Pulse ControlsDocument4 pagesUltrasonic Pulse ControlsDessvi ConsultoresNo ratings yet
- 2 Econtent - Module2 - Session4Document20 pages2 Econtent - Module2 - Session4devesh vermaNo ratings yet
- 10 1109@tim 2009 2022377 PDFDocument7 pages10 1109@tim 2009 2022377 PDFfahrur rizaNo ratings yet
- NDT Concrete Quality and Homogeneity EvaluationDocument2 pagesNDT Concrete Quality and Homogeneity EvaluationHaridarshan EquipmentsNo ratings yet
- The Basic Principles of OFDMDocument30 pagesThe Basic Principles of OFDMTippu SultanNo ratings yet
- PCR Measur Tektronix PDFDocument24 pagesPCR Measur Tektronix PDFGrzegorz ZissNo ratings yet
- Sampling and Reconstruction Trainer ST2101: An ISO 9001: 2000 CompanyDocument34 pagesSampling and Reconstruction Trainer ST2101: An ISO 9001: 2000 CompanyAnis MaqboolNo ratings yet
- The Basic Principles of OFDMDocument30 pagesThe Basic Principles of OFDMPonteyoss KonjokelossNo ratings yet
- InterHarm UGM16Document25 pagesInterHarm UGM16David MorenoNo ratings yet
- Monitoring Power System Through Wide-Area MeasurementsDocument33 pagesMonitoring Power System Through Wide-Area MeasurementsbijoyNo ratings yet
- Work RDDS IEL 12635660 661470fb8c2d4Document6 pagesWork RDDS IEL 12635660 661470fb8c2d4asNo ratings yet
- The Basic Principles of OFDMDocument30 pagesThe Basic Principles of OFDMsureshya22No ratings yet
- Lecture Panel VarDocument26 pagesLecture Panel VarTrang DangNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- Jindal Placementpapers3Document3 pagesJindal Placementpapers3ajeet200388No ratings yet
- Analysis of ȝPMU Noise Characteristics and Its Influence On Distribution Network Fault LocationDocument6 pagesAnalysis of ȝPMU Noise Characteristics and Its Influence On Distribution Network Fault LocationtiagoNo ratings yet
- Noise in High-Speed Digital-to-Analog Converters: P.-Y. Bourgeois, T. Imaike, G. Goavec-Merou and E. RubiolaDocument4 pagesNoise in High-Speed Digital-to-Analog Converters: P.-Y. Bourgeois, T. Imaike, G. Goavec-Merou and E. RubiolasEbyRESNo ratings yet
- How To Measure LTEDocument13 pagesHow To Measure LTEfarrukhmohammedNo ratings yet
- U Thet Tin ICSE2017 YTU PDFDocument5 pagesU Thet Tin ICSE2017 YTU PDFthettinNo ratings yet
- Calibration and Testing of Phasor Measurement UnitDocument13 pagesCalibration and Testing of Phasor Measurement UnitSalvador ArcosNo ratings yet
- Invitation of Fresh Budgetary Quotes Aug 10 Final DocumentDocument6 pagesInvitation of Fresh Budgetary Quotes Aug 10 Final DocumentDeepak Kumar SinghNo ratings yet
- RohatgiDocument44 pagesRohatgiaaaNo ratings yet
- Cseml ManualDocument30 pagesCseml ManualsangeetadineshNo ratings yet
- Spectrum Analyzer PDFDocument18 pagesSpectrum Analyzer PDFAgus SantosaNo ratings yet
- Synchrophasor Estimation Algorithm Using Legendre PolynomialsDocument5 pagesSynchrophasor Estimation Algorithm Using Legendre Polynomialsfahrur rizaNo ratings yet
- DTMB (CTTB) X-Series Measurement Application N6156A & W6156ADocument14 pagesDTMB (CTTB) X-Series Measurement Application N6156A & W6156AWilliam MakiNo ratings yet
- Jitter-Wander Measurements GuideDocument30 pagesJitter-Wander Measurements GuidegercruNo ratings yet
- OFDM For Optical CommunicationsDocument41 pagesOFDM For Optical CommunicationsPrasanna Kumar100% (1)
- CS Lab Manual OriginalDocument30 pagesCS Lab Manual OriginalK Vinod KumarNo ratings yet
- Feedback Control: Massachusetts Institute of Technology Subject 2.017Document12 pagesFeedback Control: Massachusetts Institute of Technology Subject 2.017Dr. Ir. R. Didin Kusdian, MT.No ratings yet
- 2018 - Transient Monitoring Function Based Fault Classifier ForDocument7 pages2018 - Transient Monitoring Function Based Fault Classifier ForParesh NayakNo ratings yet
- Ec0323 Communication Lab 2labDocument68 pagesEc0323 Communication Lab 2labBerinCDhasNo ratings yet
- Automatic Recognition of Power Quality Disturbances: Sea LDocument52 pagesAutomatic Recognition of Power Quality Disturbances: Sea LKURAKULA VIMAL KUMARNo ratings yet
- A Fast Time-Frequency Multi-Window Analysis Using A Tuning Directional KernelDocument27 pagesA Fast Time-Frequency Multi-Window Analysis Using A Tuning Directional Kerneldfourer33No ratings yet
- UoG Presentation-4Document28 pagesUoG Presentation-4Carlos GamioNo ratings yet
- LTE CourseDocument164 pagesLTE Coursefgfdfdsd9104100% (2)
- 03 Proteksi Arus Lebih RevDocument52 pages03 Proteksi Arus Lebih RevSupriyanto SuhonoNo ratings yet
- Spraar4 - Configuring Source of Multiple ePWM Trip-Zone EventsDocument8 pagesSpraar4 - Configuring Source of Multiple ePWM Trip-Zone EventsDriveNo ratings yet
- Presentation Naspi Cepel Coppe UfrjDocument22 pagesPresentation Naspi Cepel Coppe UfrjJosé EduardoNo ratings yet
- 6-1 ITEA MachineLearning EW Edit Final Rev2Document21 pages6-1 ITEA MachineLearning EW Edit Final Rev2Shivam TrivediNo ratings yet
- Global Performance of A Semi-Submersible 5MW Wind-Turbine Including Second-Order Wave - Diffraction Effects - Kim H C 2015Document15 pagesGlobal Performance of A Semi-Submersible 5MW Wind-Turbine Including Second-Order Wave - Diffraction Effects - Kim H C 2015AkhilaNo ratings yet
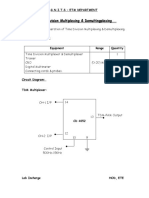
- Time Division Multiplexing & DemultingplexingDocument5 pagesTime Division Multiplexing & Demultingplexingneha yarrapothuNo ratings yet
- Simulation Study 5G NR PHYDocument8 pagesSimulation Study 5G NR PHYgroupe1 stNo ratings yet
- Equalilzat'ion SC-FDE Test-Bed: 'UniversityDocument4 pagesEqualilzat'ion SC-FDE Test-Bed: 'UniversityGayathri KongaraNo ratings yet
- Chapter 6 - Sampling TheoryDocument32 pagesChapter 6 - Sampling TheoryMuhammad Aljamal100% (1)
- Pages From (MiCOM P54x - EN M - La4 Technical Manual 120911)Document6 pagesPages From (MiCOM P54x - EN M - La4 Technical Manual 120911)dvnishshankaNo ratings yet
- M 3.1. Analog Measurements of NoiseDocument56 pagesM 3.1. Analog Measurements of NoisejcsabaNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Advanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondFrom EverandAdvanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- The Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsFrom EverandThe Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsSylvain ClercNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- TAKE HOME QUIZ 1 StatDocument2 pagesTAKE HOME QUIZ 1 StatL AlcosabaNo ratings yet
- Mobile Biometrics: Solutions SuiteDocument12 pagesMobile Biometrics: Solutions SuiteSaahilSimhadNo ratings yet
- Jonas Danvind DR - Ltu DT 0523 SeDocument124 pagesJonas Danvind DR - Ltu DT 0523 SeXXNo ratings yet
- Cold Rainbow Voice Calling ScriptDocument4 pagesCold Rainbow Voice Calling ScriptjawidNo ratings yet
- Engineering Challenges of Stationary Wireless Smart Ocean Observation SystemsDocument14 pagesEngineering Challenges of Stationary Wireless Smart Ocean Observation Systemsal shayokhNo ratings yet
- Introduction To Programming SyllabusDocument5 pagesIntroduction To Programming Syllabusvoduykhoa2504No ratings yet
- Top 5 Data Engineering Projects You Can't Afford To Miss by Yusuf Ganiyu Feb, 2024 MediumDocument23 pagesTop 5 Data Engineering Projects You Can't Afford To Miss by Yusuf Ganiyu Feb, 2024 Mediumvlvpkiw1vNo ratings yet
- C091 (J) Aisg C091 (K) 1MDocument2 pagesC091 (J) Aisg C091 (K) 1MВадим ЧеховскийNo ratings yet
- Assignment #2Document4 pagesAssignment #2Reynald PachecoNo ratings yet
- Combining Steering BehaviorDocument18 pagesCombining Steering BehaviorNirmal Varghese Babu 2528No ratings yet
- UFTRuntime EngineDocument17 pagesUFTRuntime EngineVidyaNo ratings yet
- Ningbo Dynasty Furniture Co.,Ltd Cixi Euroart Furniture and Craft Co.,LtdDocument15 pagesNingbo Dynasty Furniture Co.,Ltd Cixi Euroart Furniture and Craft Co.,LtdLucaNo ratings yet
- Laboratory Experiment Report Rubric - 01Document1 pageLaboratory Experiment Report Rubric - 01Pearl ArcamoNo ratings yet
- Expanding Sections Cheat Sheet - Free From InsideTheSquare - CoDocument3 pagesExpanding Sections Cheat Sheet - Free From InsideTheSquare - CoFJKILLNo ratings yet
- 2002 Display Products (With Dealer Pricing)Document9 pages2002 Display Products (With Dealer Pricing)ericksgalaNo ratings yet
- C++ Learn: Object Oriented ProgrammingDocument6 pagesC++ Learn: Object Oriented ProgrammingHarish MNo ratings yet
- HTML Knowledge OrganiserDocument2 pagesHTML Knowledge Organisernoraturkey1No ratings yet
- Sharp Lc-37d42u Lc-37d43u Lc-C3742u Supp1Document6 pagesSharp Lc-37d42u Lc-37d43u Lc-C3742u Supp1Carlos MoratoNo ratings yet
- LiliumDocument11 pagesLiliumRicky WijayaNo ratings yet
- Kunci Jawaban B Inggris KLS Ix ADocument20 pagesKunci Jawaban B Inggris KLS Ix ABudi AssauqiaNo ratings yet
- RAS_StrategyDocument31 pagesRAS_StrategykillaforniaNo ratings yet
- Face Mask Detection System Using PythonDocument42 pagesFace Mask Detection System Using Pythonmohan singhNo ratings yet
- Test Bank For Spreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 7Th Edition Cliff Ragsdale 1285418689 978128541868 Full Chapter PDFDocument36 pagesTest Bank For Spreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 7Th Edition Cliff Ragsdale 1285418689 978128541868 Full Chapter PDFlisa.mayette986100% (11)
- NKK Switches Complete Catalog PDFDocument916 pagesNKK Switches Complete Catalog PDFljNo ratings yet
- Small Wins - JavaDocument79 pagesSmall Wins - JavaÇháñdù PàsùmârthíNo ratings yet
- AIS Exam ReviewDocument11 pagesAIS Exam ReviewJhaister Ashley LayugNo ratings yet
- Budget Template Updated 8857Document18 pagesBudget Template Updated 8857EbrahimAbuZaidNo ratings yet