You might also like
- Ultrasound Basics Principles: Resident Physics LecturesDocument71 pagesUltrasound Basics Principles: Resident Physics LecturesRolianisa LianiNo ratings yet
- Modern Electrical Installation for Craft StudentsFrom EverandModern Electrical Installation for Craft StudentsRating: 4.5 out of 5 stars4.5/5 (4)
- Hydraulic JumpDocument28 pagesHydraulic JumpRyan HiraniNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Group 2 Mark Chap 3 Lesson 7 To 12Document30 pagesGroup 2 Mark Chap 3 Lesson 7 To 12allanrnmanalotoNo ratings yet
- Concept Map Physics STPMDocument8 pagesConcept Map Physics STPMOne_sofian2715No ratings yet
- Calculation of Wind-Induced Dynamic Load of Transmission Tower Considering Coupled Vibration Affection of Conductors (Viento en Torre y Vano)Document5 pagesCalculation of Wind-Induced Dynamic Load of Transmission Tower Considering Coupled Vibration Affection of Conductors (Viento en Torre y Vano)David Matatan PérezNo ratings yet
- Quantum MechanicsDocument46 pagesQuantum Mechanicsmaran.suguNo ratings yet
- Chapter 2-Revisi - Earthquake Ground Motion and Response SpectraDocument85 pagesChapter 2-Revisi - Earthquake Ground Motion and Response Spectranyssa7890No ratings yet
- Forced Oscillations Lab Report Draft 1Document13 pagesForced Oscillations Lab Report Draft 1Praveen Dennis XavierNo ratings yet
- What Is SoundDocument22 pagesWhat Is SoundAbigail de LeonNo ratings yet
- Free Fall PresentationDocument27 pagesFree Fall PresentationRowena Sta MariaNo ratings yet
- Home Assignment - 5: Fig. 1 (A) Fig. 1 (B)Document2 pagesHome Assignment - 5: Fig. 1 (A) Fig. 1 (B)egupta1No ratings yet
- Introduction RF and MW - 2Document21 pagesIntroduction RF and MW - 2Shehzad IbrahimNo ratings yet
- Jntu Kak 2 2 Ece Emtl Set 1Document15 pagesJntu Kak 2 2 Ece Emtl Set 1himeshemraanNo ratings yet
- Skript 1Document23 pagesSkript 1Jf ChenNo ratings yet
- Vanoverschele 1975 Punch Through Diode MixerDocument7 pagesVanoverschele 1975 Punch Through Diode MixerDr. Uday Sheorey, Ph.D.No ratings yet
- Wave Scattering On A Domain Wall in A Chain of PT - Symmetric CouplersDocument7 pagesWave Scattering On A Domain Wall in A Chain of PT - Symmetric CouplershackerofxpNo ratings yet
- 6.013 Electromagnetics and Applications: Problem 1. (30/200 Points)Document3 pages6.013 Electromagnetics and Applications: Problem 1. (30/200 Points)Shahid HasanNo ratings yet
- Bloch FunctionsDocument5 pagesBloch Functionsalvaro562003No ratings yet
- FM SintDocument7 pagesFM SintDionisio VultureNo ratings yet
- Topic 23 - Electromagnetic InductionDocument6 pagesTopic 23 - Electromagnetic InductionMauriceNo ratings yet
- Bloch Function: Electron Waves in A Solid: Bloch FunctionsDocument5 pagesBloch Function: Electron Waves in A Solid: Bloch FunctionsmichalnaffriNo ratings yet
- MTS 7.4.4 The Gunn OscillatorDocument6 pagesMTS 7.4.4 The Gunn Oscillatormrunal1729No ratings yet
- Johnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduDocument4 pagesJohnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduMark Paul Santin GanzalinoNo ratings yet
- Linear Vs Circular PolarizationDocument16 pagesLinear Vs Circular Polarizationbernard smithNo ratings yet
- MHD Plasma WavesDocument14 pagesMHD Plasma WavesehsanvatanNo ratings yet
- H.K. Moffatt - The Mean Electromotive Force Generated by Turbulence in The Limit of Perfect ConductivityDocument10 pagesH.K. Moffatt - The Mean Electromotive Force Generated by Turbulence in The Limit of Perfect ConductivityYokdmNo ratings yet
- Gatti1990 PDFDocument8 pagesGatti1990 PDFIdhamNo ratings yet
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforDocument7 pagesShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15No ratings yet
- Progress in Electromagnetics Research M, Vol. 30, 253-269, 2013Document17 pagesProgress in Electromagnetics Research M, Vol. 30, 253-269, 2013Gilberto MejiaNo ratings yet
- Electromagnetic Induction BasicsDocument4 pagesElectromagnetic Induction BasicsMahesh AbnaveNo ratings yet
- Lecture 5Document6 pagesLecture 5Muhammed IfkazNo ratings yet
- Mass M Force Acceleration: Lecture 7: Lumped ElementsDocument16 pagesMass M Force Acceleration: Lecture 7: Lumped ElementsAlessandro VinassaNo ratings yet
- Basic ConceptDocument56 pagesBasic ConceptHarish KumarNo ratings yet
- Ferro Panel 2003Document6 pagesFerro Panel 2003_FlyMan_No ratings yet
- PLK Vicwood K.T. Chong Sixth Form College 83' AL Physics: Essay Marking SchemeDocument7 pagesPLK Vicwood K.T. Chong Sixth Form College 83' AL Physics: Essay Marking Scheme林柄洲No ratings yet
- T Rec K.18 198811 I!!pdf eDocument21 pagesT Rec K.18 198811 I!!pdf eRyan TriadhitamaNo ratings yet
- Multifunctional SensorDocument25 pagesMultifunctional SensorOrazio GarofaloNo ratings yet
- 2 Theory and Concepts: Vibration 3Document15 pages2 Theory and Concepts: Vibration 3Juan SilvaNo ratings yet
- Terebilo 1998 0399Document5 pagesTerebilo 1998 0399Particle Beam Physics LabNo ratings yet
- Electromagnetic Induction NotesDocument14 pagesElectromagnetic Induction NotesDexter FungNo ratings yet
- EE All TutorialsDocument39 pagesEE All Tutorialsjoahua mickkinNo ratings yet
- Railgun PhysicsDocument24 pagesRailgun PhysicsNicholas Jackson100% (1)
- Hall EffectDocument10 pagesHall EffectGautam ChauhanNo ratings yet
- Wiley Chapter 2Document89 pagesWiley Chapter 2王玟翔No ratings yet
- Bucking Coils Produce Energy Gain2Document6 pagesBucking Coils Produce Energy Gain2KONSTANTINOS TOMAZISNo ratings yet
- Fimfeififviifv FJFNFNFNFJFNFDocument18 pagesFimfeififviifv FJFNFNFNFJFNFHari NirmalNo ratings yet
- EM Final Exam - 04 - Aug 07-2019Document1 pageEM Final Exam - 04 - Aug 07-2019KHÔI PHẠM ĐĂNGNo ratings yet
- Winsem2022-23 Bphy101l TH VL2022230503783 Cat-1-Qp - KeyDocument3 pagesWinsem2022-23 Bphy101l TH VL2022230503783 Cat-1-Qp - KeyVaibhav PathakNo ratings yet
- Parameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentDocument6 pagesParameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentVoet ZoekerNo ratings yet
- Analysis of Eddy-Current Brakes For High Speed Railway: P. J. Wang JDocument3 pagesAnalysis of Eddy-Current Brakes For High Speed Railway: P. J. Wang JAlex CruzNo ratings yet
- Chapter 4 - Electromagnetic Induction For SharingDocument42 pagesChapter 4 - Electromagnetic Induction For SharingTrisha Mae PerezNo ratings yet
- MIT6 013S09 Chap05Document25 pagesMIT6 013S09 Chap05Jasmien HassanienNo ratings yet
- CE 181 Surfacewaves ch5Document11 pagesCE 181 Surfacewaves ch5Nick Jhonatan Moreno MorenoNo ratings yet
- WoPhO 2011 S12Document12 pagesWoPhO 2011 S12TienMC GamerNo ratings yet
- 1990 PC NemoshkalenkoDocument5 pages1990 PC NemoshkalenkoXan TolusNo ratings yet
- IES EE C 1995 (Electrical Guru - Blogspot.in)Document9 pagesIES EE C 1995 (Electrical Guru - Blogspot.in)Tanmay PokaleNo ratings yet
- 01 Sinusoidal Excitation 2013Document10 pages01 Sinusoidal Excitation 2013Divyang PatelNo ratings yet
- Ac Circuits Handout and TutorialsDocument32 pagesAc Circuits Handout and TutorialsyaseenVision100% (1)
- Problem 1: Radiative Decay in Two Dimensions: EE 231, Lasers Spring 2007 Problem Set 3 Due 5PM 2 MayDocument2 pagesProblem 1: Radiative Decay in Two Dimensions: EE 231, Lasers Spring 2007 Problem Set 3 Due 5PM 2 MayHusam Abduldaem MohammedNo ratings yet
- r050211001 Electromagnetic Waves and Transmission LinesDocument8 pagesr050211001 Electromagnetic Waves and Transmission LinesSrinivasa Rao GNo ratings yet
- Bandgap 3Document14 pagesBandgap 3Olaoye Olajide AbdulmutolibNo ratings yet
- The Impedance of Multi-Layer Vacuum ChambersDocument12 pagesThe Impedance of Multi-Layer Vacuum ChambersHema SinghNo ratings yet
- Aipmt 2007 ScreeningDocument34 pagesAipmt 2007 ScreeningkajalNo ratings yet
- Ass 2 EepDocument14 pagesAss 2 EepAkp AkpNo ratings yet
- Surge Propagation in Electrical SystemsDocument5 pagesSurge Propagation in Electrical SystemssamiNo ratings yet
- Bridge Engineering Handbook Seismic DesiDocument25 pagesBridge Engineering Handbook Seismic DesiCaio DiasNo ratings yet
- A Importancia Da Metrologia Na Gestao EmpresarialDocument9 pagesA Importancia Da Metrologia Na Gestao EmpresarialCaio DiasNo ratings yet
- GramposfarpaDocument5 pagesGramposfarpaCaio DiasNo ratings yet
- Roba - Stop - M: Your Reliable PartnerDocument20 pagesRoba - Stop - M: Your Reliable PartnerCaio DiasNo ratings yet
- Reference Only Reference Only: Load End Driver EndDocument1 pageReference Only Reference Only: Load End Driver EndCaio DiasNo ratings yet
- Syc 400 Ref DWG Rev1Document1 pageSyc 400 Ref DWG Rev1Caio DiasNo ratings yet
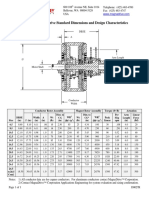
- Adjustable Speed Drive Standard Dimensions and Design CharacteristicsDocument1 pageAdjustable Speed Drive Standard Dimensions and Design CharacteristicsCaio DiasNo ratings yet
- Flashcards: I Have Been Married For 5 YearsDocument8 pagesFlashcards: I Have Been Married For 5 YearsCaio DiasNo ratings yet
- DPP Jee PDFDocument113 pagesDPP Jee PDFriddhiNo ratings yet
- NCERT Solutions For Class 11 Physics 12 May Chapter 6 Work Energy and PowerDocument26 pagesNCERT Solutions For Class 11 Physics 12 May Chapter 6 Work Energy and Powerdaksh tyagiNo ratings yet
- Calculating Light Lighting-Wageningen University and Research 156931Document9 pagesCalculating Light Lighting-Wageningen University and Research 156931Raul RodriguezNo ratings yet
- Research ArticleDocument12 pagesResearch ArticleSyed BukhariNo ratings yet
- Waves: Applications E Lesson: 4Document51 pagesWaves: Applications E Lesson: 4Said Mohamed MahadNo ratings yet
- Introduction To Heat ExchangersDocument14 pagesIntroduction To Heat ExchangersKai Michael MendozaNo ratings yet
- Lecture - 10 Gamma DecayDocument27 pagesLecture - 10 Gamma DecaySherlcok HolmesNo ratings yet
- Heat Transfer-1DDocument11 pagesHeat Transfer-1DAshutosh AcharyaNo ratings yet
- The University of Dodoma: YearDocument16 pagesThe University of Dodoma: YearEDENINo ratings yet
- 05 - Optica Fibre Modes PDFDocument27 pages05 - Optica Fibre Modes PDFKhawaja MaimoonNo ratings yet
- Worksheet 4 Waves Boundary BehaviorDocument2 pagesWorksheet 4 Waves Boundary BehaviorMary BakhoumNo ratings yet
- 414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsDocument3 pages414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsGuruh Mehra MulyanaNo ratings yet
- 6X2T4T65-1516 - HsadcDocument3 pages6X2T4T65-1516 - HsadcARYANDI APRILIANTONo ratings yet
- TEST 1 - 5 - Plan and Conduct A Passage - Meteorology.Document10 pagesTEST 1 - 5 - Plan and Conduct A Passage - Meteorology.Crypto IOTNo ratings yet
- Topic2 AtomicStructureDocument93 pagesTopic2 AtomicStructurenijamNo ratings yet
- Work Sheet 2 Kinematics of Particle: Curvilinear Motion A) Problems Using Rectangular CoordinateDocument5 pagesWork Sheet 2 Kinematics of Particle: Curvilinear Motion A) Problems Using Rectangular CoordinatebeshirNo ratings yet
- Explanation TextDocument6 pagesExplanation TextFransiska SiskaNo ratings yet
- IR SensorDocument5 pagesIR Sensormohammed amaan paNo ratings yet
- Engineering Science and Technology, An International JournalDocument9 pagesEngineering Science and Technology, An International JournalEng-MustafaHathalAl-SaraiNo ratings yet
- COLORSDocument21 pagesCOLORSAna Cristina Castro-CayabyabNo ratings yet
- Laser Physics McqsDocument8 pagesLaser Physics McqsTalha FarooqNo ratings yet
- Ekman Boundary Layer Mixed Convective Heat Transfer Flow Through A Porous Medium With Large SuctionDocument10 pagesEkman Boundary Layer Mixed Convective Heat Transfer Flow Through A Porous Medium With Large SuctionMd. Mohidul HaqueNo ratings yet
- Quantum MechanicsDocument87 pagesQuantum MechanicsNaveenjot KaurNo ratings yet