You might also like
- MRI BasicsDocument73 pagesMRI BasicsLyla BrjanNo ratings yet
- Bill Gibson - AudioPro Home Recording CourseDocument250 pagesBill Gibson - AudioPro Home Recording CourseLucian Indre100% (3)
- DC Motor Calculations: Mechanical Power, Torque-Speed CurvesDocument10 pagesDC Motor Calculations: Mechanical Power, Torque-Speed Curvesoctav12No ratings yet
- Theoretical Calculation of Electric Vehicle PerformanceDocument4 pagesTheoretical Calculation of Electric Vehicle PerformanceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Motor CalculationsDocument8 pagesMotor CalculationssmhbNo ratings yet
- Design of Switched Reluctance Motor For Three Wheeler Electric VehicleDocument4 pagesDesign of Switched Reluctance Motor For Three Wheeler Electric VehicleidescitationNo ratings yet
- CHAPTER 2 StudentDocument64 pagesCHAPTER 2 StudentIrsy4dNo ratings yet
- To Study The Factors On Which The Internal Resistance of A Cell Depends.Document16 pagesTo Study The Factors On Which The Internal Resistance of A Cell Depends.Dhananjay63% (101)
- Design of High Efficiency Electrical Motors For A Hybrid Electric VehicleDocument14 pagesDesign of High Efficiency Electrical Motors For A Hybrid Electric Vehicleapi-3709675100% (1)
- Electric TractorDocument5 pagesElectric TractorANAND.H.SNo ratings yet
- GRADE 12 SMAW MODULE 4A 1st QuarterDocument20 pagesGRADE 12 SMAW MODULE 4A 1st QuarterClare GarcesNo ratings yet
- Control of Electric Vehicle PDFDocument31 pagesControl of Electric Vehicle PDFBrunoZueroNo ratings yet
- Energy Audit Report for Ajanta Products Printing PressDocument8 pagesEnergy Audit Report for Ajanta Products Printing PressAmit KeshriNo ratings yet
- Chp-1-Part-1 Fund. of Protection and RelaysDocument97 pagesChp-1-Part-1 Fund. of Protection and RelaysSentex Habasha100% (1)
- Meo Class 4 Oral ElectricalDocument39 pagesMeo Class 4 Oral ElectricalRohit Raj100% (1)
- Efficiency Maps of Electrical MachinesDocument9 pagesEfficiency Maps of Electrical Machinesmdht1556No ratings yet
- Brushless DC Motor Design For Electric Traction SystemDocument5 pagesBrushless DC Motor Design For Electric Traction Systemvishal komakulaNo ratings yet
- Politecnico Di Torino Porto Institutional Repository: (Proceeding) Efficiency Maps of Electrical MachinesDocument10 pagesPolitecnico Di Torino Porto Institutional Repository: (Proceeding) Efficiency Maps of Electrical MachinesdidierzefNo ratings yet
- 02 Cruise Paper 2Document8 pages02 Cruise Paper 2Satya RaiNo ratings yet
- Irjet V5i4718 PDFDocument4 pagesIrjet V5i4718 PDFVinit YadavNo ratings yet
- Mechanical Engineering and SciencesDocument11 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Measuring The Performance Characteristics of A MotDocument6 pagesMeasuring The Performance Characteristics of A Motdani chNo ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- SAAd CepDocument6 pagesSAAd Cepgillanis multimediaNo ratings yet
- Summer Training Diesel Locomotive WorksDocument27 pagesSummer Training Diesel Locomotive WorksPankaj Sahu100% (2)
- Computation of Power of A Motor in Electric Vehicle Under City Tra Ffic and Dynamic Conditions.Document11 pagesComputation of Power of A Motor in Electric Vehicle Under City Tra Ffic and Dynamic Conditions.HCTL OpenNo ratings yet
- Design of An Outer-Rotor-Type Permanent Magnet Motor For Electric Scooter Propulsion SystemsDocument7 pagesDesign of An Outer-Rotor-Type Permanent Magnet Motor For Electric Scooter Propulsion SystemsVinay KashyapNo ratings yet
- HugoBrogueira ExtendedAbstract PDFDocument10 pagesHugoBrogueira ExtendedAbstract PDFs2858No ratings yet
- ETC Pra 6Document6 pagesETC Pra 6ELENo ratings yet
- Toaz - Info 45187594 Summer Training Diesel Locomotive Works PPT PRDocument27 pagesToaz - Info 45187594 Summer Training Diesel Locomotive Works PPT PRjaykachave.scoe.mechNo ratings yet
- Switched Reluctance Drives For Electric Vehicle ApplicationsDocument7 pagesSwitched Reluctance Drives For Electric Vehicle ApplicationsHuynh Thanh AnhNo ratings yet
- Torque Analysis of 2 KW BLDC (Brushless Direct Current) Motor With Speed Variations in Electric Cars E-FalcoDocument11 pagesTorque Analysis of 2 KW BLDC (Brushless Direct Current) Motor With Speed Variations in Electric Cars E-Falcomoreds1983No ratings yet
- Drive Fundamentals and DC Motor CharacteristicsDocument3 pagesDrive Fundamentals and DC Motor CharacteristicsJoeNo ratings yet
- EV Conversion Performance Analysis and Sizing of Traction Motor and BatteryDocument6 pagesEV Conversion Performance Analysis and Sizing of Traction Motor and BatteryChayathorn DuangtongsukNo ratings yet
- Chapter 3Document66 pagesChapter 3ollata kalanoNo ratings yet
- IOP Earth Environmental: MPPT Methods Wind EnergyDocument10 pagesIOP Earth Environmental: MPPT Methods Wind EnergySairamireddy PalliNo ratings yet
- Analysis of Gear Box Performance Curves & Optimal Selection of Gear RatiosDocument8 pagesAnalysis of Gear Box Performance Curves & Optimal Selection of Gear RatiosSunil Aundhekar100% (1)
- Parameter Determination of The BLDC MotorDocument4 pagesParameter Determination of The BLDC MotorHuynh Thanh AnhNo ratings yet
- Designand Studyof Transmission Systemfor Electric VehiclesDocument4 pagesDesignand Studyof Transmission Systemfor Electric VehiclesDilshan PriyadarshanaNo ratings yet
- IJEART03703Document4 pagesIJEART03703anil kasotNo ratings yet
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNo ratings yet
- IC Engine - Chapter 3 & 4 Handout - 2022Document27 pagesIC Engine - Chapter 3 & 4 Handout - 2022nunuNo ratings yet
- Energy Saving in Induction MotorsDocument11 pagesEnergy Saving in Induction MotorsS Bharadwaj ReddyNo ratings yet
- Vehicle Power and Transmission CharacteristicsDocument14 pagesVehicle Power and Transmission CharacteristicsAnkush GoelNo ratings yet
- ES140304 - Omkar Tade 103-108Document6 pagesES140304 - Omkar Tade 103-108namanbhatia505No ratings yet
- Closed Loop Control of Separately Excited DC MotorDocument5 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Mathematical Modeling of The Three Phase Induction Motor Couple To DC Motor in Hybrid Electric VehicleDocument5 pagesMathematical Modeling of The Three Phase Induction Motor Couple To DC Motor in Hybrid Electric Vehiclenico dishanthNo ratings yet
- Research Electric Car - Selection of Power Rating of An Electric Motor For Electric VehiclesDocument4 pagesResearch Electric Car - Selection of Power Rating of An Electric Motor For Electric VehiclesMahmoudAhmedNo ratings yet
- 3.2 Electric Motors - Revised (Table Format)Document8 pages3.2 Electric Motors - Revised (Table Format)Sumit AgrawalNo ratings yet
- SM2204Document15 pagesSM2204Tarun GeetarNo ratings yet
- 445 AndradaDocument5 pages445 AndradaNishant GoyalNo ratings yet
- Artigo 34Document5 pagesArtigo 34LaísNo ratings yet
- Design of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. CervinkaDocument6 pagesDesign of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. Cervinkashivendra singhNo ratings yet
- MICROMO DC Motor Calculations White Paper Refresh 2018Document14 pagesMICROMO DC Motor Calculations White Paper Refresh 2018fcompartNo ratings yet
- Design Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEADocument5 pagesDesign Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEASuman SahaNo ratings yet
- Chassis Dynamometer For Electric Two WheelersDocument5 pagesChassis Dynamometer For Electric Two Wheelersdani chNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- Novel Operation and Control of An Electr PDFDocument12 pagesNovel Operation and Control of An Electr PDFRohanNo ratings yet
- draft 2 pptDocument22 pagesdraft 2 pptPoornima MNo ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Design Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleDocument19 pagesDesign Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleARUN KUMARNo ratings yet
- 09 - Chapter 3 PDFDocument34 pages09 - Chapter 3 PDFsoma_durga6606No ratings yet
- Modeling Simulation and Energy-Flow Study of A Battery Electric Vehicle in LabviewDocument7 pagesModeling Simulation and Energy-Flow Study of A Battery Electric Vehicle in LabviewhemaNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Uputstvo XMT 608Document6 pagesUputstvo XMT 608drina_pdNo ratings yet
- Infinity-Reference5760 5761 CarampDocument33 pagesInfinity-Reference5760 5761 CarampJeff ReikenNo ratings yet
- 03F PowerSystem Stability DR MannanDocument27 pages03F PowerSystem Stability DR MannanNawshed AhmedNo ratings yet
- SOT-363 Plastic-Encapsulate Transistors: Umx1NDocument3 pagesSOT-363 Plastic-Encapsulate Transistors: Umx1Nramon elias hicher leonNo ratings yet
- GET-Electrical Test Paper PDFDocument10 pagesGET-Electrical Test Paper PDFatul sachanNo ratings yet
- Electrical Submersible Pump (ESP) : Components (Equipment Description) PTP-6.1Document19 pagesElectrical Submersible Pump (ESP) : Components (Equipment Description) PTP-6.1nawarsNo ratings yet
- Parachutist's Vertical Speed vs Time Graph ExplainedDocument15 pagesParachutist's Vertical Speed vs Time Graph ExplainedDewan Olin ChotepadaeNo ratings yet
- As 60265.2-2005 High-Voltage Switches High-Voltage Switches For Rated Voltages of 52kV and Above (IEC60265-2Document9 pagesAs 60265.2-2005 High-Voltage Switches High-Voltage Switches For Rated Voltages of 52kV and Above (IEC60265-2SAI Global - APACNo ratings yet
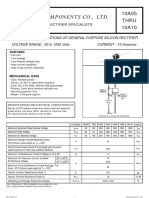
- DC Components Co., LTD.: 10A05 Thru 10A10Document3 pagesDC Components Co., LTD.: 10A05 Thru 10A10Faulhaber AdrianNo ratings yet
- 1200 CP For Pipelines Corrosion Prevention and Metallurgy ManualDocument1 page1200 CP For Pipelines Corrosion Prevention and Metallurgy ManualamrinderNo ratings yet
- 24 Avajc 11Document3 pages24 Avajc 11m.a.todurkarNo ratings yet
- Medium Power Transistor: L KQLT1G SeriesDocument4 pagesMedium Power Transistor: L KQLT1G SeriesStuxnetNo ratings yet
- Icse Semester 1 Examination Specimen Question Paper Physics SCIENCE Paper - 1Document11 pagesIcse Semester 1 Examination Specimen Question Paper Physics SCIENCE Paper - 1RISHIKESH KUMAR MISHRANo ratings yet
- Tec5500 Om eDocument334 pagesTec5500 Om echanlal100% (1)
- SDTS-15 Digital Timer Manual V2Document2 pagesSDTS-15 Digital Timer Manual V2mica50% (2)
- EEE307 All TermDocument20 pagesEEE307 All Termসামিন জাওয়াদNo ratings yet
- Electrical Engineering Technician Part 1Document4 pagesElectrical Engineering Technician Part 1kseenanan123No ratings yet
- Fna41560 1008744 PDFDocument18 pagesFna41560 1008744 PDFLeandro RibeiroNo ratings yet
- WADI-01-E-00-MTS-16 22kV Capacitor Schematic Drawing-R01Document29 pagesWADI-01-E-00-MTS-16 22kV Capacitor Schematic Drawing-R01Bader AhmedNo ratings yet
- EleDocument25 pagesEleakela_lifeNo ratings yet
- Assignment 197,163,164,198Document14 pagesAssignment 197,163,164,198Shubham GuptaNo ratings yet