You might also like
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Diffeq PDFDocument4 pagesDiffeq PDFGhenoiu PaulNo ratings yet
- Power Geometry in Algebraic and Differential EquationsFrom EverandPower Geometry in Algebraic and Differential EquationsNo ratings yet
- Fundamental Concepts To Finite Element FormulationsDocument9 pagesFundamental Concepts To Finite Element FormulationsElga ArsiaNo ratings yet
- FEMConvergenceDocument28 pagesFEMConvergenceNaveen RajNo ratings yet
- Finite Element Methods: Dr. Muhammad FarhanDocument15 pagesFinite Element Methods: Dr. Muhammad FarhanHafiz AbdulrehmanNo ratings yet
- DiffeqDocument15 pagesDiffeqDon eladioNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument15 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsMarvinEboraNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument28 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deMarvinEboraNo ratings yet
- Chapter 2 Stress and Strain - Axial LoadingDocument43 pagesChapter 2 Stress and Strain - Axial Loadingtaymar18No ratings yet
- One Dimensional Wave EquationDocument23 pagesOne Dimensional Wave Equationshriramnimbalkar99No ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument30 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deMarvinEboraNo ratings yet
- Fem ConvergenceDocument28 pagesFem ConvergencedineshtheaguNo ratings yet
- Soils - Deformation CalculationDocument28 pagesSoils - Deformation Calculationthomas yapiNo ratings yet
- 7 DiffeqDocument17 pages7 DiffeqVaibhavNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument30 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deIsrar UllahNo ratings yet
- Harmonic Oscillator & Rigid Rotor: Recap: - Separation of Variables For Solving Schrödinger EquationDocument9 pagesHarmonic Oscillator & Rigid Rotor: Recap: - Separation of Variables For Solving Schrödinger EquationDmidNo ratings yet
- 3.1.Solutions-First Order ODEs-Separable MethodDocument6 pages3.1.Solutions-First Order ODEs-Separable MethodReginald AshongNo ratings yet
- Lecture 02 Energy-Rayleigh-Ritz 2015Document40 pagesLecture 02 Energy-Rayleigh-Ritz 2015Mustapha BelloNo ratings yet
- Chapter 1 (First Order - 17)Document37 pagesChapter 1 (First Order - 17)Nuraddeen MagajiNo ratings yet
- FEM IntroductionDocument127 pagesFEM Introductionrohansuthar.ascentNo ratings yet
- MIT2 29F11 Lect 12Document27 pagesMIT2 29F11 Lect 12Vesa RäisänenNo ratings yet
- 303 Chapter2 1Document11 pages303 Chapter2 1Hendri HermawanNo ratings yet
- 10 11648 J Mcs 20170205 12Document13 pages10 11648 J Mcs 20170205 12Haris HoraniNo ratings yet
- Laur LaurDocument34 pagesLaur LaurAndre LimaNo ratings yet
- Lecture 08 - Particles in 1D BoxDocument30 pagesLecture 08 - Particles in 1D BoxArc Zero100% (1)
- Applied Engineering Math.Document31 pagesApplied Engineering Math.Arian ShohelNo ratings yet
- Chapter - 4 The Applications of Schrodinger EquationDocument13 pagesChapter - 4 The Applications of Schrodinger Equationsolomon mwatiNo ratings yet
- Euler Bernoulli Beam Theory Using The Finite Difference MethodDocument33 pagesEuler Bernoulli Beam Theory Using The Finite Difference MethodЛейсан МиннахметоваNo ratings yet
- Cauchy-Euler Equation: Higher-Order Differential EquationsDocument7 pagesCauchy-Euler Equation: Higher-Order Differential EquationsDanial AliNo ratings yet
- TOPIC: Physics of Advanced Mechanical Materials / Materials for Machines (기계재료특론) (0287) (Prof. Banerjee Narayan) (바너지나라얀 교수님) A brief review of Quantum Mechanics-2Document11 pagesTOPIC: Physics of Advanced Mechanical Materials / Materials for Machines (기계재료특론) (0287) (Prof. Banerjee Narayan) (바너지나라얀 교수님) A brief review of Quantum Mechanics-2Fahim Faisal AmioNo ratings yet
- WWWWDocument18 pagesWWWWศิวาเวช อบมาNo ratings yet
- Derivation of Stiffness and Flexibility For Rods and BeamsDocument9 pagesDerivation of Stiffness and Flexibility For Rods and BeamsNumair Ahmad FarjanNo ratings yet
- Strong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoDocument6 pagesStrong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoSahab HafeezNo ratings yet
- Symmetry: On Eigenfunctions of The Boundary Value Problems For Second Order Differential Equations With InvolutionDocument9 pagesSymmetry: On Eigenfunctions of The Boundary Value Problems For Second Order Differential Equations With InvolutionAbdizhahanNo ratings yet
- Lecture 3Document16 pagesLecture 3Ramachandra ReddyNo ratings yet
- Ma1512 Cheatsheet Summary Differential Equations For EngineeringDocument4 pagesMa1512 Cheatsheet Summary Differential Equations For EngineeringDennis SorianoNo ratings yet
- Asymptotics in The Dirichlet Problem For Second Order Elliptic Equations With Degeneration On The BoundaryDocument16 pagesAsymptotics in The Dirichlet Problem For Second Order Elliptic Equations With Degeneration On The BoundaryVVD 101No ratings yet
- Integrated Optical WaveguidesDocument14 pagesIntegrated Optical WaveguidesPhillip DoNo ratings yet
- F (X) (1 U (X) ) DDocument14 pagesF (X) (1 U (X) ) DCarlos FazNo ratings yet
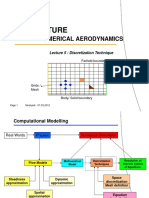
- AE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDocument28 pagesAE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDaniel TanNo ratings yet
- Chapter 1 - Differential Equations (Part 3)Document65 pagesChapter 1 - Differential Equations (Part 3)Naym MiaNo ratings yet
- Numerical Tool For Antenna AnalysisDocument41 pagesNumerical Tool For Antenna AnalysisThilaga MohanNo ratings yet
- Chapter 1 (First Order)Document43 pagesChapter 1 (First Order)EmmanuelNo ratings yet
- PART I: Ordinary Differential EquationsDocument5 pagesPART I: Ordinary Differential EquationsBhupi.SamNo ratings yet
- ME2135 Week 11 SlidesDocument48 pagesME2135 Week 11 Slideshuykhang.tranpNo ratings yet
- Fem 9Document22 pagesFem 9tilahun yeshiyeNo ratings yet
- Differential Eqn.Document20 pagesDifferential Eqn.professorx4646No ratings yet
- Basics of FEADocument68 pagesBasics of FEABalasubramani vNo ratings yet
- IMP GreensDocument6 pagesIMP GreensfpttmmNo ratings yet
- Pull inDocument11 pagesPull inDIPEN VADALIANo ratings yet
- MITRES 6 002S08 Part2 PDFDocument231 pagesMITRES 6 002S08 Part2 PDFmokayedNo ratings yet
- Lesson 4 Topics2 - 2nd ODE (Part1)Document63 pagesLesson 4 Topics2 - 2nd ODE (Part1)Echo SlamNo ratings yet
- Chapter 2 (Higher Order)Document32 pagesChapter 2 (Higher Order)EmmanuelNo ratings yet
- Two-Dimensional Problem Solution: y X X yDocument55 pagesTwo-Dimensional Problem Solution: y X X yRAMKUMARNo ratings yet
- Pde PDFDocument49 pagesPde PDFsachin guptaNo ratings yet
- C 2 G A M O D: Hapter Lobal Pproximation Ethods in NE ImensionDocument34 pagesC 2 G A M O D: Hapter Lobal Pproximation Ethods in NE ImensionElmar CuellarNo ratings yet
- Fem PresentationDocument33 pagesFem PresentationAditya UpadhyaNo ratings yet
- CSM CampbellDocument7 pagesCSM CampbellnadamopNo ratings yet
- Lecture 3 FEAShapeFunctions1DDocument24 pagesLecture 3 FEAShapeFunctions1DatilolaNo ratings yet
- Most Cited Papers: Quantum ComputersDocument205 pagesMost Cited Papers: Quantum ComputersManjunath.RNo ratings yet
- MD1 01 Stresses (Feb2021)Document18 pagesMD1 01 Stresses (Feb2021)AwesomeArchie 0No ratings yet
- Light and Sound 1 QPDocument13 pagesLight and Sound 1 QPSumira ZamanNo ratings yet
- Lorentz Ether Theory - WikipediaDocument11 pagesLorentz Ether Theory - WikipediaAlice DarwinNo ratings yet
- Base Plate and Bearing PlateDocument15 pagesBase Plate and Bearing PlateHamad RazaNo ratings yet
- DJ12 80Document2 pagesDJ12 80ParvezNo ratings yet
- Relativity For B.Tech 2021Document51 pagesRelativity For B.Tech 2021anurag100% (1)
- Science10 q2 Mod1of6 Electromagneticspectrum v2Document15 pagesScience10 q2 Mod1of6 Electromagneticspectrum v2Christine BelaleNo ratings yet
- Experiment 6 Conservation of EnergyDocument5 pagesExperiment 6 Conservation of EnergyHarold ParenasNo ratings yet
- Platinumstripe™ 1800 Series Pe-Rt Pipe & FittingsDocument2 pagesPlatinumstripe™ 1800 Series Pe-Rt Pipe & Fittingsabdelkader benabdallahNo ratings yet
- B - Tech Civil Batch 2011 PTU SyllabusDocument12 pagesB - Tech Civil Batch 2011 PTU SyllabusMohit Dev100% (1)
- Capacitors 3Document14 pagesCapacitors 3mutaz33No ratings yet
- CHM031L - ThermodynamicsDocument88 pagesCHM031L - ThermodynamicsKath CarmonaNo ratings yet
- Unit III Stress DistributionDocument23 pagesUnit III Stress DistributionIlakkya m.sNo ratings yet
- Firearms IdentificationDocument11 pagesFirearms IdentificationWendell MalarastaNo ratings yet
- Sample Lab 2Document7 pagesSample Lab 2Febri SSNo ratings yet
- Jmo-2018-Q AnsweredDocument3 pagesJmo-2018-Q AnsweredAnonymous OlT7WTNo ratings yet
- Project: EXPO 2020 - OV016 - USA PAVILION Inspection and Test Plan (Itp)Document5 pagesProject: EXPO 2020 - OV016 - USA PAVILION Inspection and Test Plan (Itp)qc_531040655No ratings yet
- WG10 - 4 Chapter 01aDocument67 pagesWG10 - 4 Chapter 01akbaqueroNo ratings yet
- Egm 3601 - Exam 1Document10 pagesEgm 3601 - Exam 1smahmood23No ratings yet
- Answer52022 SPAK20230524103233Document89 pagesAnswer52022 SPAK20230524103233NifemiNo ratings yet
- Magnetic Particle Examination Procedure: International Inspection Services LTDDocument12 pagesMagnetic Particle Examination Procedure: International Inspection Services LTDsantanurini100% (1)
- Advances in Blast Movement Modelling - David La RosaDocument15 pagesAdvances in Blast Movement Modelling - David La RosaIgnacio UribeNo ratings yet
- Maths Project A TitleDocument3 pagesMaths Project A TitleVenkatram PrabhuNo ratings yet
- NKC Sir: Previous Years Questions 2016 To 2021Document8 pagesNKC Sir: Previous Years Questions 2016 To 2021Rushwin VaishnavNo ratings yet
- Trigonometric IntegralsDocument15 pagesTrigonometric IntegralsUrek MazinoNo ratings yet
- Ermac and McCammon JCP 1978 Brownian Dynamics With HydrodynamicDocument10 pagesErmac and McCammon JCP 1978 Brownian Dynamics With Hydrodynamicpraphul kumarNo ratings yet
- Mecorrel3 - Thermodynamics Ii PDFDocument3 pagesMecorrel3 - Thermodynamics Ii PDFJustinnNo ratings yet
- ST Olave's Summatim No 80 - Summer 2020 PDFDocument6 pagesST Olave's Summatim No 80 - Summer 2020 PDFolavesadminNo ratings yet
- Thermal Modelling of Induction Machine Using The Lumped Parameter ModelDocument1 pageThermal Modelling of Induction Machine Using The Lumped Parameter ModelJovelyn Clair L. RosarioNo ratings yet