You might also like
- Smart Helmet For Safe Driving: January 2019Document5 pagesSmart Helmet For Safe Driving: January 2019Banshi Dhar GuptaNo ratings yet
- VTU Project Synopsis Blind Walking StickDocument12 pagesVTU Project Synopsis Blind Walking StickVinaya DhavalagiNo ratings yet
- JETIR2006263Document3 pagesJETIR2006263mac.reid29No ratings yet
- Iot Based Irrigation SystemDocument19 pagesIot Based Irrigation SystemNithyasri ANo ratings yet
- Commercial Radar Sensors and Applications: AbstractDocument5 pagesCommercial Radar Sensors and Applications: AbstractSarakapalli NikhithaNo ratings yet
- Flexibility and Reliability of Numerical Protection RelayDocument6 pagesFlexibility and Reliability of Numerical Protection RelayEngr. AbdullahNo ratings yet
- HLK-LD2410 User Manual V1 02Document15 pagesHLK-LD2410 User Manual V1 02Miguel AcedoNo ratings yet
- Voice & Touch Controlled WheelchairDocument25 pagesVoice & Touch Controlled WheelchairashishNo ratings yet
- Design and Implementation of Smart Cane For Visually Impaired PeopleDocument6 pagesDesign and Implementation of Smart Cane For Visually Impaired PeopleiyoasNo ratings yet
- Robotic Pool Cleaning Machine Using ArduinoDocument9 pagesRobotic Pool Cleaning Machine Using ArduinoIJRASETPublicationsNo ratings yet
- Technical Textiles - High Performance Fibre Analysis - FTIRDocument3 pagesTechnical Textiles - High Performance Fibre Analysis - FTIRDr.R.LoganathanNo ratings yet
- Dr. Ambedkar Institute of TechnologyDocument8 pagesDr. Ambedkar Institute of TechnologySuresh SuriNo ratings yet
- 43 1821 NF 02 - Um - RapDocument25 pages43 1821 NF 02 - Um - RapfkkgđkjkNo ratings yet
- Laborie Sonography Portasan 3D Service ManualDocument43 pagesLaborie Sonography Portasan 3D Service ManualAmirNo ratings yet
- Nasa: Bergh 00 1190Document6 pagesNasa: Bergh 00 1190NASAdocumentsNo ratings yet
- Smart White CaneDocument6 pagesSmart White CaneIJRASETPublicationsNo ratings yet
- PayloadDocument4 pagesPayloadXabi AdinNo ratings yet
- RF Controlled Solar Panel Based Robotic VehicleDocument6 pagesRF Controlled Solar Panel Based Robotic VehicleMohan Babu ANo ratings yet
- Real-Time Control System For Various Applications Using Sensor Fusion AlgorithmsDocument4 pagesReal-Time Control System For Various Applications Using Sensor Fusion AlgorithmsAchillesNo ratings yet
- Missile Detection and Automatic Destroy SystemDocument5 pagesMissile Detection and Automatic Destroy SystemManoj100% (1)
- Eco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechDocument12 pagesEco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechGautham NNo ratings yet
- REPORTphase 1Document17 pagesREPORTphase 1Suchitha Vijay kumarNo ratings yet
- Wiper SensorDocument7 pagesWiper SensorFaid MuzahidNo ratings yet
- Project Report KalyanDocument26 pagesProject Report Kalyankalyan100% (1)
- Microwave Active Denial System (MADS)Document8 pagesMicrowave Active Denial System (MADS)apipNo ratings yet
- Midtronics Celltron Ultra CTU-6000 Battery TesterDocument4 pagesMidtronics Celltron Ultra CTU-6000 Battery TesterJaques ValleNo ratings yet
- Gesture Recognition Using Mm-Wave Sensor For Human-Car InterfaceDocument5 pagesGesture Recognition Using Mm-Wave Sensor For Human-Car Interface明軒呂No ratings yet
- 375-Article Text-755-1-10-20180510Document7 pages375-Article Text-755-1-10-20180510Sharath Chandra BheemagouniNo ratings yet
- Development of An Embedded System For Distance Measuring Using Ultrasonic SensorDocument4 pagesDevelopment of An Embedded System For Distance Measuring Using Ultrasonic SensornikhithaNo ratings yet
- Iot Circuit BreakerDocument5 pagesIot Circuit BreakerMadhuri RudravelliNo ratings yet
- Laporan Pendahuluan Heart FailureDocument4 pagesLaporan Pendahuluan Heart FailureJuan SlaxNo ratings yet
- IRJET - Gesture Controlled Robot With Obs PDFDocument3 pagesIRJET - Gesture Controlled Robot With Obs PDFCarina FelnecanNo ratings yet
- Data Acquisition System For Monitoring Variation in Bridge ParametersDocument5 pagesData Acquisition System For Monitoring Variation in Bridge ParameterserpublicationNo ratings yet
- Ijece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1Document6 pagesIjece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1iaset123No ratings yet
- Smart Breaking SystemDocument6 pagesSmart Breaking SystemKiran UniyalNo ratings yet
- Remote Area Monitoring RobotDocument5 pagesRemote Area Monitoring RobotIJSTENo ratings yet
- Smart Breaking System PDFDocument6 pagesSmart Breaking System PDFSACHIN UgaleNo ratings yet
- Fabrication of Intelligent Braking SystemDocument6 pagesFabrication of Intelligent Braking SystemVishal LabdeNo ratings yet
- IoT. Lecture 2. Sensors Introduction and IMUDocument27 pagesIoT. Lecture 2. Sensors Introduction and IMU3142588563No ratings yet
- Paper22304 2307Document4 pagesPaper22304 2307AjeeshNo ratings yet
- Ornithopter With Live Video Reception For Military SurveillanceDocument4 pagesOrnithopter With Live Video Reception For Military Surveillancechandana soojiNo ratings yet
- Greedy AlgorithmDocument5 pagesGreedy AlgorithmsundarrajanNo ratings yet
- IJRTI2304047Document4 pagesIJRTI2304047Himanshu KumarNo ratings yet
- Application of Combined Adaptive Fourier Filtering Technique and Fault Detector To Fast Distance ProtectionDocument8 pagesApplication of Combined Adaptive Fourier Filtering Technique and Fault Detector To Fast Distance ProtectiondragomirmarianNo ratings yet
- Journalsresaim Ijresm v3 I7 24Document4 pagesJournalsresaim Ijresm v3 I7 24Sandip MouryaNo ratings yet
- Journalsresaim Ijresm v3 I7 24Document4 pagesJournalsresaim Ijresm v3 I7 24Sandip MouryaNo ratings yet
- Rishabh Das (Original)Document7 pagesRishabh Das (Original)SAMIR ENRIQUEZ GARCIANo ratings yet
- 1MRK505396-BEN A en Product Guide Line Differential Protection RED650 Version 2.2Document90 pages1MRK505396-BEN A en Product Guide Line Differential Protection RED650 Version 2.2Pavel DobiasNo ratings yet
- Automotive Sensors and MeasurementsDocument10 pagesAutomotive Sensors and MeasurementsDevansh ChhajlaniNo ratings yet
- Sample_pbl Report PDFDocument13 pagesSample_pbl Report PDFChinmay KulkarniNo ratings yet
- Analysis of RF Remote Security Using Software Defined Radio KeeLoqDocument65 pagesAnalysis of RF Remote Security Using Software Defined Radio KeeLoqaTOMicNo ratings yet
- Transmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicDocument5 pagesTransmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicIJRASETPublicationsNo ratings yet
- EAN 26M Digital Inclinometer 1212 11 R04Document4 pagesEAN 26M Digital Inclinometer 1212 11 R04Mriganabh ChoudhuryNo ratings yet
- From President's Desk : Information & Communication Technologies (ICT) in Condition Monitoring!!Document4 pagesFrom President's Desk : Information & Communication Technologies (ICT) in Condition Monitoring!!tvr123No ratings yet
- Modeling and Designing of Gesture Control Robot: October 2017Document7 pagesModeling and Designing of Gesture Control Robot: October 2017Raka SinhaNo ratings yet
- Agriculture Drone For Spraying Fertilizer and PesticidesDocument4 pagesAgriculture Drone For Spraying Fertilizer and PesticidesMohit Kumar AasnaniNo ratings yet
- Hardware Implementation Based On Head Movement Using Accelerometer SensorDocument5 pagesHardware Implementation Based On Head Movement Using Accelerometer SensorRatakarn BunteeNo ratings yet
- Solar Operated Metal Detector Robot Based On GSMDocument4 pagesSolar Operated Metal Detector Robot Based On GSMIJIRSTNo ratings yet
- System Analysis of A Fully-Integrated Capacitive Angular SensorDocument6 pagesSystem Analysis of A Fully-Integrated Capacitive Angular SensormehdiNo ratings yet
- cybrary-cert-welcome-to-cybraryDocument1 pagecybrary-cert-welcome-to-cybraryvamsiyadavNo ratings yet
- FabricationDocument57 pagesFabricationvamsiyadavNo ratings yet
- Evidence HandlingDocument18 pagesEvidence HandlingvamsiyadavNo ratings yet
- Unit 1Document76 pagesUnit 1vamsiyadavNo ratings yet
- Int250 Lecture 0Document24 pagesInt250 Lecture 0vamsiyadavNo ratings yet
- Instruction PlanCSE304NDocument4 pagesInstruction PlanCSE304NvamsiyadavNo ratings yet
- Nvidia Vamsi 12113081Document7 pagesNvidia Vamsi 12113081vamsiyadavNo ratings yet
- 9.case ToolsDocument89 pages9.case ToolsBhati GNo ratings yet
- Berne Convention 1886 PDFDocument22 pagesBerne Convention 1886 PDFIsckra RahmanNo ratings yet
- Lect 27 To 28 White Box TestingDocument99 pagesLect 27 To 28 White Box TestingF. B. I.No ratings yet
- PatentDocument7 pagesPatentvamsiyadavNo ratings yet
- Unit 1Document76 pagesUnit 1vamsiyadavNo ratings yet
- Maths Murder MysteryDocument6 pagesMaths Murder Mysteryvamsiyadav0% (1)
- Lecture44 18807 Lecture567Document42 pagesLecture44 18807 Lecture567AbhayNo ratings yet
- Database Fundamentals QuizDocument16 pagesDatabase Fundamentals QuizvamsiyadavNo ratings yet
- IntroductiontodbmsDocument29 pagesIntroductiontodbmsNippun BobbiliNo ratings yet
- Transmission MediaDocument48 pagesTransmission MediavamsiyadavNo ratings yet
- CH 14Document49 pagesCH 14vamsiyadavNo ratings yet
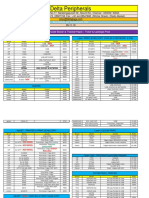
- Printers DeltaperperalDocument4 pagesPrinters DeltaperperalParid RidwanNo ratings yet
- User Guide Guide de L'utilisateur: English FrançaisDocument177 pagesUser Guide Guide de L'utilisateur: English Français陳建華No ratings yet
- Replace HPC Speed Sensors on LM5000 Gas TurbineDocument4 pagesReplace HPC Speed Sensors on LM5000 Gas TurbineAlejandro Romero Ballestas100% (1)
- Data Sheet: Coaxial Cable RG - 174 - /UDocument2 pagesData Sheet: Coaxial Cable RG - 174 - /UAbolfazl Yousef ZamanianNo ratings yet
- Polarization Scans by Tafel Scan Using PotentiostatDocument6 pagesPolarization Scans by Tafel Scan Using PotentiostatRaza AliNo ratings yet
- Lacal Test ManualDocument25 pagesLacal Test ManualAnonymous oX70P4mNo ratings yet
- Cadence Online Documentation TutorialDocument12 pagesCadence Online Documentation Tutorialvijaymaloth4No ratings yet
- FE Exam Preparation Book VOL1 LimitedDisclosureVerDocument643 pagesFE Exam Preparation Book VOL1 LimitedDisclosureVerSuika Doreamon100% (1)
- Chapter 2 Ej501Document10 pagesChapter 2 Ej501Adrian MarinNo ratings yet
- Electrical & Electronics: Institute of Engineering Studies Mock Test - I (EEE)Document10 pagesElectrical & Electronics: Institute of Engineering Studies Mock Test - I (EEE)Institute of Engineering Studies (IES)No ratings yet
- LoggingDocument52 pagesLoggingMvrnaidu MithraNo ratings yet
- DC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenDocument19 pagesDC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenAli H. NumanNo ratings yet
- A - ELSB - Cat - 2020 - II - 05 - Protection and Safety - Preview - 26-10-2020Document190 pagesA - ELSB - Cat - 2020 - II - 05 - Protection and Safety - Preview - 26-10-2020Vanja KrunicNo ratings yet
- Ace 6Document12 pagesAce 6benyNo ratings yet
- BMP180 Barometric Pressure Sensor Specifications and CodeDocument34 pagesBMP180 Barometric Pressure Sensor Specifications and Codeabhilash100% (3)
- Leach: Shortform CatalogDocument20 pagesLeach: Shortform CatalogGeeNo ratings yet
- 15Kw 10 KW 20Kw 10Kw Best 3 Phase Hybrid Solar Inverter ManualDocument17 pages15Kw 10 KW 20Kw 10Kw Best 3 Phase Hybrid Solar Inverter ManualAbdu Qaid 2No ratings yet
- OSHA standard for electrical protective equipmentDocument11 pagesOSHA standard for electrical protective equipmentPratikNo ratings yet
- MONITOR DE ISOLAÇÃO TERASAKI Earth - LeakageDocument5 pagesMONITOR DE ISOLAÇÃO TERASAKI Earth - LeakageclaudioandrevalverdeNo ratings yet
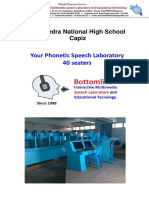
- 40 Seaters Phonetic Speech LaboratoryDocument11 pages40 Seaters Phonetic Speech LaboratoryBernardo BasmayorNo ratings yet
- ITE101 - Lesson 1Document12 pagesITE101 - Lesson 1Jabelle Mae DoteNo ratings yet
- Chapter 1 Introduction in Biomedical SensorsDocument15 pagesChapter 1 Introduction in Biomedical Sensorssadeq ali al-srabiNo ratings yet
- CV Throttle System R226.084.en-01 PDFDocument12 pagesCV Throttle System R226.084.en-01 PDFMf LuiNo ratings yet
- 30073Document32 pages30073Faby GemeNo ratings yet
- Discovery 4 BrochureDocument64 pagesDiscovery 4 Brochuresafindit100% (1)
- How To Build Hardware Support For Secure StartupDocument34 pagesHow To Build Hardware Support For Secure StartupjuanrozalezNo ratings yet
- Mapping The Electrostatic Potential and Electric FieldDocument5 pagesMapping The Electrostatic Potential and Electric Fieldmende5100% (1)
- Non-Destructive Testing (CHAPTER 6)Document63 pagesNon-Destructive Testing (CHAPTER 6)imfendi100% (4)
- PLC SCADA Based Substation Automation Project ReportDocument98 pagesPLC SCADA Based Substation Automation Project ReportJaya Shree100% (2)
- Darlington TransistorDocument3 pagesDarlington TransistorKishore CkNo ratings yet