You might also like
- Paranoia XP - Gamemaster Screen Booklet - Mandatory Fun Enforcement PackDocument24 pagesParanoia XP - Gamemaster Screen Booklet - Mandatory Fun Enforcement PackStBash100% (3)
- 04 SAMSS 005 Check ValvesDocument9 pages04 SAMSS 005 Check ValvesShino UlahannanNo ratings yet
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDocument12 pagesAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)
- Michelle LeBaron, Venashri - Pillay) Conflict AcrosDocument241 pagesMichelle LeBaron, Venashri - Pillay) Conflict AcrosBader100% (2)
- Intumescent Paint For Steel NZ - Coating - Co.nzDocument8 pagesIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonNo ratings yet
- Astm 2017-F2059Document5 pagesAstm 2017-F2059laythNo ratings yet
- NST - Meromorphic ConnectionsDocument16 pagesNST - Meromorphic ConnectionsGuillaume TaharNo ratings yet
- Foundations Computational Mathematics: Online Learning AlgorithmsDocument26 pagesFoundations Computational Mathematics: Online Learning AlgorithmsYuan YaoNo ratings yet
- 5.0042739 The Ring ZP of P-AdicDocument14 pages5.0042739 The Ring ZP of P-AdicNga TruongNo ratings yet
- Some Results On Shadowing and Local Entropy Properties of Dynamical SystemsDocument29 pagesSome Results On Shadowing and Local Entropy Properties of Dynamical SystemsysantariaNo ratings yet
- Schoner TDocument12 pagesSchoner TEpic WinNo ratings yet
- Hilbert Back PropDocument40 pagesHilbert Back PropdanielcrespinNo ratings yet
- Industrial Mathematics Institute: Research ReportDocument25 pagesIndustrial Mathematics Institute: Research ReportpostscriptNo ratings yet
- Spectral Element Approximation of Fredholm Integral Eigenvalue ProblemsDocument21 pagesSpectral Element Approximation of Fredholm Integral Eigenvalue ProblemsAnonymous 1Yc9wYDtNo ratings yet
- Theory and Formulas For Backpropagation in Hilbert SpacesDocument27 pagesTheory and Formulas For Backpropagation in Hilbert SpacesdanielcrespinNo ratings yet
- A Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureDocument17 pagesA Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureKarima AitNo ratings yet
- Assignment 5Document3 pagesAssignment 5SUDEEP SAHANo ratings yet
- Efficient Solution of Schrodinger Poisson Equation PDFDocument8 pagesEfficient Solution of Schrodinger Poisson Equation PDFIrfanKhanNo ratings yet
- Fixed Point Result in Menger Space With EA PropertyDocument6 pagesFixed Point Result in Menger Space With EA PropertyAlexander DeckerNo ratings yet
- Local FieldsDocument60 pagesLocal FieldsJodeNo ratings yet
- CorrespondencesDocument13 pagesCorrespondencesAllen BrownNo ratings yet
- Fundamental Equations of Mie TheoryDocument25 pagesFundamental Equations of Mie TheoryErikNo ratings yet
- Spectral Element Approximation of Fredholm Integral Eigenvalue ProblemsDocument20 pagesSpectral Element Approximation of Fredholm Integral Eigenvalue ProblemsAnonymous 1Yc9wYDtNo ratings yet
- Artigogll PCDocument22 pagesArtigogll PCAnonymous 1Yc9wYDtNo ratings yet
- Optimal Quantizers For Radon Random Vectors in 2007 Journal of ApproximatioDocument27 pagesOptimal Quantizers For Radon Random Vectors in 2007 Journal of ApproximatiocodakahNo ratings yet
- An Algorithm For Minimax Solution of Overdetennined Systems of Non-Linear EquationsDocument8 pagesAn Algorithm For Minimax Solution of Overdetennined Systems of Non-Linear EquationsDewi FitriyaniNo ratings yet
- Stable Manifold TheoremDocument7 pagesStable Manifold TheoremRicardo Miranda MartinsNo ratings yet
- Quantum Field Theory: Graeme Segal December 5, 2008Document16 pagesQuantum Field Theory: Graeme Segal December 5, 2008Zaratustra NietzcheNo ratings yet
- Composite Quantum WellsDocument7 pagesComposite Quantum WellsRafael BautistaNo ratings yet
- Fejer TheoremDocument10 pagesFejer TheoremVishal NairNo ratings yet
- Lorentz TensorsDocument10 pagesLorentz TensorsGerardus Urrutia SNo ratings yet
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationDocument18 pagesCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationAndrés MercadoNo ratings yet
- Annals of MathematicsDocument42 pagesAnnals of MathematicsKauê SenaNo ratings yet
- Behavior of The Fourier-Walsh Coefficients of A Corrected FunctionDocument8 pagesBehavior of The Fourier-Walsh Coefficients of A Corrected Functionurgent urgentNo ratings yet
- Application of Differential Equation in Computer ScienceDocument6 pagesApplication of Differential Equation in Computer ScienceUzair Razzaq100% (1)
- Geometrical and Statistical Properties of Systems ofDocument9 pagesGeometrical and Statistical Properties of Systems ofFarhad JavedaniNo ratings yet
- KorovkinDocument10 pagesKorovkinMurali KNo ratings yet
- Convergence and Error Estimate of The Steffensen MDocument5 pagesConvergence and Error Estimate of The Steffensen MpabloNo ratings yet
- Simmetries and Recursion Operators For Solution EquationDocument19 pagesSimmetries and Recursion Operators For Solution Equationdnse90900No ratings yet
- 1 s2.0 0022247X83901695 MainDocument7 pages1 s2.0 0022247X83901695 Mainpratuthegreat2003No ratings yet
- VIP and CP S Nanda (Me)Document26 pagesVIP and CP S Nanda (Me)SIDDHARTH MITRANo ratings yet
- Douglas N. Arnold: Background On The Continuous ProblemDocument11 pagesDouglas N. Arnold: Background On The Continuous Problem8310032914No ratings yet
- NIPS 2000 The Kernel Trick For Distances PaperDocument7 pagesNIPS 2000 The Kernel Trick For Distances PaperstiananfinsenNo ratings yet
- Lecture 28: The Spectral GapDocument6 pagesLecture 28: The Spectral Gapsemselvan794694No ratings yet
- Week3 PDFDocument16 pagesWeek3 PDFmouseandmooseNo ratings yet
- 4 Gauge Theories and The Standard Model: 4.1 Abelian Gauge Field TheoryDocument38 pages4 Gauge Theories and The Standard Model: 4.1 Abelian Gauge Field Theorycifarha venantNo ratings yet
- An - Analogue.to - Minkowski's.geometry - Of.numbers - In.a.field - Of.series K. MahlerDocument36 pagesAn - Analogue.to - Minkowski's.geometry - Of.numbers - In.a.field - Of.series K. MahlerLázaro AlbuquerqueNo ratings yet
- Fuzzy Metrics and Statistical Metric SpacesDocument9 pagesFuzzy Metrics and Statistical Metric SpacesbbeeNo ratings yet
- C2: Band StructureDocument8 pagesC2: Band StructureMike GarciaNo ratings yet
- Karapinar-Petrusel-Carpathian2021-multivalued OperatorsDocument8 pagesKarapinar-Petrusel-Carpathian2021-multivalued OperatorsAnonymous bk7we8No ratings yet
- CorrespondencesDocument15 pagesCorrespondencesSamy YNo ratings yet
- The function ω on simple n-ods: f Ivon Vidal-Escobar and Salvador Garcia-FerreiraDocument23 pagesThe function ω on simple n-ods: f Ivon Vidal-Escobar and Salvador Garcia-FerreiraMaciej ŻakowskiNo ratings yet
- Ly Thuyet Diem Bat Dong Cua Banch Va Hinh Cau FormalDocument3 pagesLy Thuyet Diem Bat Dong Cua Banch Va Hinh Cau FormaldmtriNo ratings yet
- Fixed Point Theorem in Subsets of Topological Vector Spaces: Youcef Askoura, Christiane Godet-ThobieDocument4 pagesFixed Point Theorem in Subsets of Topological Vector Spaces: Youcef Askoura, Christiane Godet-ThobiePetru Sorin BotezatNo ratings yet
- Modal Analysis Odf CFRP PanelDocument21 pagesModal Analysis Odf CFRP Paneldimos dimouNo ratings yet
- Lecture 5Document26 pagesLecture 5Nanditha ANo ratings yet
- Lec 10Document7 pagesLec 10matbaila247No ratings yet
- Donchev - Lyusternik-Graves TheoremDocument14 pagesDonchev - Lyusternik-Graves TheoremHữu Hiệu ĐoànNo ratings yet
- ECE/EAS 4870 (Spring 2014) Homework 1Document1 pageECE/EAS 4870 (Spring 2014) Homework 1BrimwoodboyNo ratings yet
- Fixed Points of Condensing Multivalued Maps in Topological Vector SpacesDocument7 pagesFixed Points of Condensing Multivalued Maps in Topological Vector SpacesDjillali BenamaraNo ratings yet
- 2311 03503Document28 pages2311 03503hitesh902320No ratings yet
- Optimal Prediction With Memory: Alexandre J. Chorin, Ole H. Hald, Raz KupfermanDocument19 pagesOptimal Prediction With Memory: Alexandre J. Chorin, Ole H. Hald, Raz KupfermanvaNo ratings yet
- An Alternative Approach To Fréchet Derivatives: Shane Arora, Hazel Browne, and Daniel DanersDocument19 pagesAn Alternative Approach To Fréchet Derivatives: Shane Arora, Hazel Browne, and Daniel DanersCristhian Paúl Neyra SalvadorNo ratings yet
- 406d PDFDocument6 pages406d PDFseyed amir salmanNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Donchev - Lyusternik-Graves TheoremDocument14 pagesDonchev - Lyusternik-Graves TheoremHữu Hiệu ĐoànNo ratings yet
- Lecture Week05Document8 pagesLecture Week05Hữu Hiệu ĐoànNo ratings yet
- 3.07 Lower Semicontinuity and Upper SemicontinuityDocument5 pages3.07 Lower Semicontinuity and Upper SemicontinuityHữu Hiệu ĐoànNo ratings yet
- Variational Inequalities Given by Semi-Pseudomonotone MappingsDocument16 pagesVariational Inequalities Given by Semi-Pseudomonotone MappingsHữu Hiệu ĐoànNo ratings yet
- Unit 2 - Presentations (Image, Impact and Making An Impression) 2Document25 pagesUnit 2 - Presentations (Image, Impact and Making An Impression) 2LK Chiarra Panaligan100% (1)
- CE Review GEOMETRY 2Document6 pagesCE Review GEOMETRY 2Paul Gerard AguilarNo ratings yet
- MiscanthusDocument27 pagesMiscanthusJacob GuerraNo ratings yet
- Latihan To: Nilai: 7.4 Benar: 37 Salah: 13Document17 pagesLatihan To: Nilai: 7.4 Benar: 37 Salah: 13glensNo ratings yet
- Convection Concentric Annulus Vertical Cylinders Filling Porous MediaDocument17 pagesConvection Concentric Annulus Vertical Cylinders Filling Porous MediakarthikeyanNo ratings yet
- Modern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaDocument2 pagesModern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaKumar KumarNo ratings yet
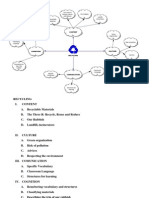
- Recycling Mind MapDocument2 pagesRecycling Mind Mapmsole124100% (1)
- Full Download Short Term Financial Management 3rd Edition Maness Test BankDocument35 pagesFull Download Short Term Financial Management 3rd Edition Maness Test Bankcimanfavoriw100% (31)
- JHS 182Document137 pagesJHS 182harbhajan singhNo ratings yet
- Chapter Three: 1 - The Coarse Grain SoilsDocument21 pagesChapter Three: 1 - The Coarse Grain SoilsSalih MohayaddinNo ratings yet
- Sheet Metal Manufacturing Companies NoidaDocument9 pagesSheet Metal Manufacturing Companies NoidaAmanda HoldenNo ratings yet
- Updating - MTO I - Unit 2 ProblemsDocument3 pagesUpdating - MTO I - Unit 2 ProblemsmaheshNo ratings yet
- (Eng) Zx890lch 5a Ks En316Document13 pages(Eng) Zx890lch 5a Ks En316MC TAK LEENo ratings yet
- Generalized Anxiety DisorderDocument24 pagesGeneralized Anxiety DisorderEula Angelica OcoNo ratings yet
- Abdominal Examination OSCE GuideDocument30 pagesAbdominal Examination OSCE Guideزياد سعيدNo ratings yet
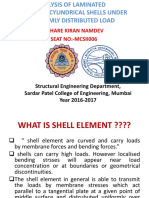
- Analysis of LaminatedDocument31 pagesAnalysis of LaminatedKaustubh JadhavNo ratings yet
- A Textual Introduction To Acarya Vasuvan PDFDocument3 pagesA Textual Introduction To Acarya Vasuvan PDFJim LeeNo ratings yet
- Psychology 114: Chapters 3 & 4Document18 pagesPsychology 114: Chapters 3 & 4Grace AndersonNo ratings yet
- Chapter 10 - The Mature ErythrocyteDocument55 pagesChapter 10 - The Mature ErythrocyteSultan AlexandruNo ratings yet
- A Tired BrainDocument3 pagesA Tired BrainSivasonNo ratings yet
- Single Door Feeder Pillar 200A MCCBDocument1 pageSingle Door Feeder Pillar 200A MCCBMiqdad AliNo ratings yet
- L2 Biostatistics ProbabilityDocument84 pagesL2 Biostatistics ProbabilityAaron CiudadNo ratings yet
- Eliminating Oscillation Between Parallel MnosfetsDocument6 pagesEliminating Oscillation Between Parallel MnosfetsCiprian BirisNo ratings yet