You might also like
- How To Build A Homemade Pure Sine Wave InverterDocument15 pagesHow To Build A Homemade Pure Sine Wave Inverterveeramaniks408100% (1)
- Building A Soldering StationDocument28 pagesBuilding A Soldering StationDaniel Anton100% (1)
- EC-1 Unit-1 Solved Part B WMRDocument31 pagesEC-1 Unit-1 Solved Part B WMRSaravanan Murugaiyan100% (1)
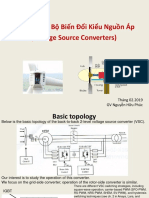
- 07 - VSC - Voltage Source ConverterDocument51 pages07 - VSC - Voltage Source ConverterHùng Võ MạnhNo ratings yet
- Novel Passive Negative and Positive Clamper Circuits Design For Electronic SystemsDocument12 pagesNovel Passive Negative and Positive Clamper Circuits Design For Electronic SystemsKIU PUBLICATION AND EXTENSIONNo ratings yet
- Three Phase InverterrsDocument21 pagesThree Phase InverterrsZack ZoldyckNo ratings yet
- Title: Study On Clamper Circuits.: Experiment No. 04Document4 pagesTitle: Study On Clamper Circuits.: Experiment No. 04shuvon3344No ratings yet
- HVDC Tutorial Lecture 12Document13 pagesHVDC Tutorial Lecture 12Abdel-Rahman SaifedinNo ratings yet
- Cmos Digital Vlsi Design: Cmos Inverter Basics - IDocument20 pagesCmos Digital Vlsi Design: Cmos Inverter Basics - ISrikanth PasumarthyNo ratings yet
- Lecture13-Bias CircuitDocument5 pagesLecture13-Bias Circuit2022303604No ratings yet
- AE Expt 1 - Clippers & ClampersDocument4 pagesAE Expt 1 - Clippers & ClampersPriNo ratings yet
- Eel324: Physical Electronics: Metal Oxide Semiconductor Field Effect Transistors (Mosfets)Document21 pagesEel324: Physical Electronics: Metal Oxide Semiconductor Field Effect Transistors (Mosfets)Vishal TomarNo ratings yet
- Clippers NJHGDocument25 pagesClippers NJHGIjaz TalibNo ratings yet
- Chapter 2 - Diode ApplicationsDocument20 pagesChapter 2 - Diode ApplicationsKanapati VeramalaiNo ratings yet
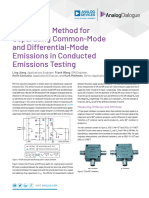
- A Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesDocument4 pagesA Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesshrikrisNo ratings yet
- LT Capacitor Selection Catalogue - MaldeDocument8 pagesLT Capacitor Selection Catalogue - Maldechandakbera100% (2)
- Unit 2Document56 pagesUnit 2hilalsherNo ratings yet
- VLSI - Design - Unit II - Part IDocument82 pagesVLSI - Design - Unit II - Part IShrujan KalkuraNo ratings yet
- Sen 544 L4Document54 pagesSen 544 L4Atef AlanaziNo ratings yet
- BJT TransistorDocument52 pagesBJT Transistoralia shahiraNo ratings yet
- Fundamentals of A.C. Circuits: Unit-2Document43 pagesFundamentals of A.C. Circuits: Unit-2Abhay kushwahaNo ratings yet
- Lecture19 150211 PDFDocument34 pagesLecture19 150211 PDFAbhishek SinghNo ratings yet
- Transistor ModellingDocument48 pagesTransistor Modellingkathreen mae fabianaNo ratings yet
- Var Compensators: Shigeo Konishi Kenji Baba Mitsuru DaigujiDocument9 pagesVar Compensators: Shigeo Konishi Kenji Baba Mitsuru DaigujiSGQNo ratings yet
- Per-Unitization and Equivalent Circuits: 1.0 Normalization of Voltage EquationsDocument35 pagesPer-Unitization and Equivalent Circuits: 1.0 Normalization of Voltage EquationsfbhkeNo ratings yet
- 5 - ELD255 - Lab 5b - Bridge Rectifier With Voltage Reg - Sep-28-18Document4 pages5 - ELD255 - Lab 5b - Bridge Rectifier With Voltage Reg - Sep-28-18killtime921No ratings yet
- CapacitoresDocument14 pagesCapacitoresLUIS EMILIO ESPINOZA HILARIONo ratings yet
- Lab 4 OpAmps1Document5 pagesLab 4 OpAmps1Hafsa ZahidNo ratings yet
- Control Method For Cascaded Hbridge Multilevel Inverter With FauDocument7 pagesControl Method For Cascaded Hbridge Multilevel Inverter With FauOumaima JORAICHENo ratings yet
- Optimal Zero-Sequence Selection For Five-Leg Inverter Based On Two-Phase SVPWM Fed Dual Two-Phase Induction MotorsDocument4 pagesOptimal Zero-Sequence Selection For Five-Leg Inverter Based On Two-Phase SVPWM Fed Dual Two-Phase Induction MotorsYash TatineniNo ratings yet
- Chapter 2 - CapacitorDocument48 pagesChapter 2 - Capacitoranisha shahiraNo ratings yet
- Ec Unit 1Document26 pagesEc Unit 1Mary SynthujaNo ratings yet
- Power Electronics: Outlines: - 3-Phase AC-DC Converters With Transformers Having Yy0 and Dy1 ConnectionDocument14 pagesPower Electronics: Outlines: - 3-Phase AC-DC Converters With Transformers Having Yy0 and Dy1 ConnectionStefany VillarrealNo ratings yet
- Small-Signal Modeling and Linear AmplificationDocument30 pagesSmall-Signal Modeling and Linear AmplificationmanjunathgprNo ratings yet
- Unit 2 First Class EceDocument26 pagesUnit 2 First Class EceKKS100% (1)
- class-AB Voltage Follower2006Document2 pagesclass-AB Voltage Follower2006tuanka1No ratings yet
- ELNModule 4Document20 pagesELNModule 4Fariya TasneemNo ratings yet
- Ecen 607 CMFB-2011Document44 pagesEcen 607 CMFB-2011Girish K NathNo ratings yet
- ENEE307 Lab6 FinalDocument11 pagesENEE307 Lab6 FinalThing0256No ratings yet
- Goal: Generate The DC Voltages - Needed For Most Electronics - Starting With The AC Power That Comes Through The Power LineDocument15 pagesGoal: Generate The DC Voltages - Needed For Most Electronics - Starting With The AC Power That Comes Through The Power LineNuc LeusNo ratings yet
- 2.transistor ModellingDocument31 pages2.transistor ModellingRohit KumarNo ratings yet
- Misalignment Tolerant Primary Controller For WPT Based ChargingDocument6 pagesMisalignment Tolerant Primary Controller For WPT Based Chargingpriyanka tiwariNo ratings yet
- Basic Electronics-BTAB02003 MPSTME-NMIMS Shirpur Campus: Sem II (2015-16)Document18 pagesBasic Electronics-BTAB02003 MPSTME-NMIMS Shirpur Campus: Sem II (2015-16)virat gautamNo ratings yet
- Open Circuit Fault Detection and Localization in Modular Multilevel ConverterDocument6 pagesOpen Circuit Fault Detection and Localization in Modular Multilevel ConverterBeto MayoNo ratings yet
- Lecture 5Document26 pagesLecture 5s231060031-5No ratings yet
- TKE 071208 - Week - 2 - Diode ApplicationDocument21 pagesTKE 071208 - Week - 2 - Diode ApplicationNivika TiffanyNo ratings yet
- CHAP 2 - Diode Applications-Clippers ClampersDocument33 pagesCHAP 2 - Diode Applications-Clippers Clampersksreddy2002No ratings yet
- Tab 1Document1 pageTab 1SuganthiVasanNo ratings yet
- Unit1 - Ac FundamentalDocument18 pagesUnit1 - Ac FundamentalBlack spidey GamingNo ratings yet
- EXPT. No. 7 VOLTAGE TO FREQUENCY CONVERTERDocument2 pagesEXPT. No. 7 VOLTAGE TO FREQUENCY CONVERTERHritik KumarNo ratings yet
- 7034 Pclab RecordDocument80 pages7034 Pclab Recordmohana sundaramNo ratings yet
- Half Wave Voltage DoublerDocument6 pagesHalf Wave Voltage Doubler1603 Anushka Vishwakarma 12-ANo ratings yet
- Power ElectronicsDocument16 pagesPower ElectronicsPerumal NamasivayamNo ratings yet
- Power Electronics Lab Manual PDFDocument16 pagesPower Electronics Lab Manual PDFBiradar ShivshankerNo ratings yet
- Full Wave Rectifier: Instruction CircuitDocument1 pageFull Wave Rectifier: Instruction CircuitAtharv LokhandeNo ratings yet
- Clamping Circuits (Diode)Document4 pagesClamping Circuits (Diode)Manjot KaurNo ratings yet
- 2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodDocument10 pages2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodNguyễn Nhật TưởngNo ratings yet
- FALLSEM2021-22 EEE3004 ETH VL2021220100810 Reference Material I 16-Aug-2021 7 Controlled Rectifier NewDocument51 pagesFALLSEM2021-22 EEE3004 ETH VL2021220100810 Reference Material I 16-Aug-2021 7 Controlled Rectifier NewVAHEESNo ratings yet
- ATV312HU40N4: Product Data SheetDocument3 pagesATV312HU40N4: Product Data SheetNur Nazihah Addina NanaNo ratings yet
- A 12.08-TOPS/W All-Digital Time-Domain CNN Engine Using Bi-Directional Memory Delay Lines For Energy Efficient Edge ComputingDocument16 pagesA 12.08-TOPS/W All-Digital Time-Domain CNN Engine Using Bi-Directional Memory Delay Lines For Energy Efficient Edge ComputingAMANDEEP SINGHNo ratings yet
- Iraudamp 11Document35 pagesIraudamp 11Bin LowenNo ratings yet
- A Fast Algorithm For SVPWM in Three Phase Power Factor Correction ApplicationDocument4 pagesA Fast Algorithm For SVPWM in Three Phase Power Factor Correction ApplicationRobin Andres Quezada SanhuezaNo ratings yet
- Electronic Control Systems Systems: Catalog HY33-1825/US North American Product OfferingDocument24 pagesElectronic Control Systems Systems: Catalog HY33-1825/US North American Product Offeringdima65No ratings yet
- Blazer 400-800 Service ManualDocument34 pagesBlazer 400-800 Service ManualdaossaNo ratings yet
- TDA8920TH PhilipsDocument31 pagesTDA8920TH PhilipsKecia Maria Ferreira dos SantosNo ratings yet
- Datasheet PDFDocument45 pagesDatasheet PDFFalevi MitnickNo ratings yet
- Preliminary MaterialDocument8 pagesPreliminary Materialzbc zbc1234568No ratings yet
- New Integration Algorithms For Estimating Motor Flux Over A Wide Speed RangeDocument9 pagesNew Integration Algorithms For Estimating Motor Flux Over A Wide Speed RangeBurakNo ratings yet
- Features Description: Low-Cost, Green-Mode PWM Controller For Flyback Converters SG6858Document13 pagesFeatures Description: Low-Cost, Green-Mode PWM Controller For Flyback Converters SG6858Dusmantha AnandaratneNo ratings yet
- General Description Features: High-Current, High-Performance Drmos Power ModuleDocument18 pagesGeneral Description Features: High-Current, High-Performance Drmos Power ModulePablo AllosiaNo ratings yet
- ARM7 LPC2129 Processor RegistersDocument34 pagesARM7 LPC2129 Processor RegistersAnchal ChaturvedyNo ratings yet
- Gea s1301Document19 pagesGea s1301PervimNo ratings yet
- Smart Home03 PDFDocument92 pagesSmart Home03 PDFeduardlopezNo ratings yet
- EC Centrifugal Fan G1G133DE1902 ENGDocument5 pagesEC Centrifugal Fan G1G133DE1902 ENGWagesusilo23121986_No ratings yet
- Converters For Electric VehicleDocument8 pagesConverters For Electric VehicleAirton FloresNo ratings yet
- The Design and Formula of DC To DC Converter SmpsDocument9 pagesThe Design and Formula of DC To DC Converter Smpsdewidewi76No ratings yet
- Title: Speed Control of Adjustable Frequency DriveDocument64 pagesTitle: Speed Control of Adjustable Frequency DriveMehroz FatimaNo ratings yet
- WWW Edn Com Design Analog 4363990 Control An LM317T With A PWM SignalDocument5 pagesWWW Edn Com Design Analog 4363990 Control An LM317T With A PWM SignalcristoferNo ratings yet
- NPS600 PC Probit II ManualDocument50 pagesNPS600 PC Probit II ManualwilyNo ratings yet
- OZW672.01 Autres Fiches en PDFDocument24 pagesOZW672.01 Autres Fiches en PDFe-genieclimatique.comNo ratings yet
- Embedded Controller Arm Lab ManualDocument54 pagesEmbedded Controller Arm Lab ManualrashiNo ratings yet
- A Novel Control Strategy Using Fuzzy Technique For Single Phase Nine-Level Grid-Connected Inverter For Photovoltaic SystemDocument6 pagesA Novel Control Strategy Using Fuzzy Technique For Single Phase Nine-Level Grid-Connected Inverter For Photovoltaic SystemerpublicationNo ratings yet
- Power Electronic Control of DC Motor DrivesDocument20 pagesPower Electronic Control of DC Motor DrivesThureinNo ratings yet
- Control BoardsDocument19 pagesControl BoardsRaul quispe quispeNo ratings yet
- Academic Year: 2017-18 Semester: Sixth Department: EEE Programme: B.Tech. EEE Course Code: 15EEE313 Course Title: Power ElectronicsDocument10 pagesAcademic Year: 2017-18 Semester: Sixth Department: EEE Programme: B.Tech. EEE Course Code: 15EEE313 Course Title: Power ElectronicsabcdefgNo ratings yet
- PH Controller 7685 AWEDocument43 pagesPH Controller 7685 AWEatiq124No ratings yet