You might also like
- APS 65 Diagnostic GuideDocument2 pagesAPS 65 Diagnostic GuideGee100% (1)
- 8cyl 8coil Ext PDFDocument1 page8cyl 8coil Ext PDFwallyNo ratings yet
- SPC 2.5 Board: Job Aid From Aristocrat Technologies Technical TrainingDocument2 pagesSPC 2.5 Board: Job Aid From Aristocrat Technologies Technical Trainingjohan camelo67% (3)
- 5.25" Floppy Disk DrivesDocument19 pages5.25" Floppy Disk DrivesEddy K. AkaiNo ratings yet
- Parallel Sysplex OverviewDocument88 pagesParallel Sysplex Overviewgborja8881331No ratings yet
- Action Flows A320Document13 pagesAction Flows A320SS Malik100% (2)
- 9 Mod ID's and Error CodesDocument23 pages9 Mod ID's and Error Codesirfan priandoko100% (5)
- Actions Flows Fmgs Preparation Navigation & Perf DataDocument13 pagesActions Flows Fmgs Preparation Navigation & Perf DatacptfdzNo ratings yet
- Xper IM Advanced System Administrator Training Course - Before 4-24-12 ClassDocument676 pagesXper IM Advanced System Administrator Training Course - Before 4-24-12 ClassJustin ChristoffelNo ratings yet
- Profinet 1Document39 pagesProfinet 1taghiNo ratings yet
- CS104: Computer Organization: 2 April, 2020Document33 pagesCS104: Computer Organization: 2 April, 2020Om PrakashNo ratings yet
- Pipeline Hazard TusharDocument31 pagesPipeline Hazard Tusharjay7821No ratings yet
- CS3350B Computer Architecture: Lecture 6.2: Instructional Level Parallelism: Hazards and ResolutionsDocument31 pagesCS3350B Computer Architecture: Lecture 6.2: Instructional Level Parallelism: Hazards and ResolutionsAsHraf G. ElrawEiNo ratings yet
- Pipeline Data HazardsDocument14 pagesPipeline Data Hazardssaurabh_chauhanNo ratings yet
- CSE 431 Computer Architecture Fall 2005 Lecture 07: Overcoming Data HazardsDocument17 pagesCSE 431 Computer Architecture Fall 2005 Lecture 07: Overcoming Data Hazardstriveni palNo ratings yet
- 3 HazardsDocument74 pages3 HazardsAnam GhaffarNo ratings yet
- Hazards: CSE378 W, 2001 CSE378 W, 2001Document6 pagesHazards: CSE378 W, 2001 CSE378 W, 2001bsudheertecNo ratings yet
- 2 Pipelining 2Document34 pages2 Pipelining 218je0140 anshbafnaNo ratings yet
- Pipeline: Datahazard, StallDocument12 pagesPipeline: Datahazard, StallMartin Fuentes AcostaNo ratings yet
- Lecture-16 CH-04 4Document21 pagesLecture-16 CH-04 4Osama RousanNo ratings yet
- 7 HazardDocument53 pages7 Hazard1352 : NEEBESH PADHYNo ratings yet
- Pipeline Hazards: Structural Hazards: Resource ConflictDocument49 pagesPipeline Hazards: Structural Hazards: Resource ConflictAaryadeep JaiswalNo ratings yet
- Lec 06Document18 pagesLec 06jyothibellary4233No ratings yet
- Airbus Action Flow A330Document13 pagesAirbus Action Flow A330Hani BoudiafNo ratings yet
- Control Hazards and Advanced Pipelinning: Christos Kozyrakis Stanford UniversityDocument40 pagesControl Hazards and Advanced Pipelinning: Christos Kozyrakis Stanford UniversityMo LêNo ratings yet
- Branch Hazards in The Pipelined Processor: Winter 2002 CSE 141 - TopicDocument24 pagesBranch Hazards in The Pipelined Processor: Winter 2002 CSE 141 - TopicVivekChaudharyNo ratings yet
- Data Dependence Distances: Write To Register File Data Available Normal/Earliest StageDocument18 pagesData Dependence Distances: Write To Register File Data Available Normal/Earliest StageAbdul Wahab MulkNo ratings yet
- Worksheet, Control System: Ge Packaged Power, L.PDocument2 pagesWorksheet, Control System: Ge Packaged Power, L.Pabhaymehta67No ratings yet
- Somachine PLC Training: Rezky Nova SonnyDocument66 pagesSomachine PLC Training: Rezky Nova SonnyIfaldiNo ratings yet
- Pipeline HazardsDocument37 pagesPipeline HazardsStarqueenNo ratings yet
- Module2 - Pipeline ILP ImplementationDocument230 pagesModule2 - Pipeline ILP ImplementationvenuNo ratings yet
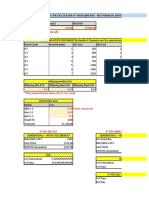
- $0.28 $24.00 $2,000.00 Change These Values Manually: If You Buy SLP If You Earn SLP YourselfDocument5 pages$0.28 $24.00 $2,000.00 Change These Values Manually: If You Buy SLP If You Earn SLP YourselfBisleshan DasNo ratings yet
- 110-HTM000034-D TJ100ME: © Tejas Networks India LTD., 2007, Proprietary Information Rev1.2 Last Update 06 April 07Document29 pages110-HTM000034-D TJ100ME: © Tejas Networks India LTD., 2007, Proprietary Information Rev1.2 Last Update 06 April 07Sayed Rahman AtifNo ratings yet
- Lec13 Data HazardsDocument42 pagesLec13 Data Hazardsmayank pNo ratings yet
- Atmega Instruction SummaryDocument4 pagesAtmega Instruction SummaryRafael nuñezNo ratings yet
- Midterm Recap: Performance EvaluationDocument5 pagesMidterm Recap: Performance EvaluationShivam AgarwalNo ratings yet
- EEE 410 - Microprocessors I: - Standard Parallel PortDocument7 pagesEEE 410 - Microprocessors I: - Standard Parallel PortCS420No ratings yet
- Del PrepaidDocument1 pageDel PrepaidSwati SrivastavaNo ratings yet
- M559mu B 5faed061bb9ce054391322Document3 pagesM559mu B 5faed061bb9ce054391322Hector PeraltaNo ratings yet
- Last Update - 11 - 2020Document30,702 pagesLast Update - 11 - 2020ahmed sobhyNo ratings yet
- TEclado Dream2655PIA-DKDocument12 pagesTEclado Dream2655PIA-DKdiego-tNo ratings yet
- Lecture 6Document17 pagesLecture 6ghy3721ghyNo ratings yet
- Enablement EAGLE STP Basic Pctest Lab Activities V1.1Document22 pagesEnablement EAGLE STP Basic Pctest Lab Activities V1.1Guillermo GarcíaNo ratings yet
- Computer Consumables and Periphaerals - 2018-19Document1 pageComputer Consumables and Periphaerals - 2018-19KAIMNo ratings yet
- Control Unit Extension For Data Hazards Forwarding UnitDocument3 pagesControl Unit Extension For Data Hazards Forwarding UnitKing Shah 673No ratings yet
- Protocol Ems mhhk808778Document1 pageProtocol Ems mhhk808778technicalfield n350No ratings yet
- Lecture18 PDFDocument35 pagesLecture18 PDFTimothy EngNo ratings yet
- Operation Node B With Hyper Terminal PDFDocument29 pagesOperation Node B With Hyper Terminal PDFRAYENNE AYOUBENo ratings yet
- DM15 SBS Jan 18 2001Document2 pagesDM15 SBS Jan 18 2001IvayloNo ratings yet
- Upper RFC (Target) Tooling RFC (Target) : FA'04 / A Maddie Max / SS Revisions Review (12/15)Document4 pagesUpper RFC (Target) Tooling RFC (Target) : FA'04 / A Maddie Max / SS Revisions Review (12/15)Lim DongseopNo ratings yet
- P541 OrderForm - V15 - 112019Document9 pagesP541 OrderForm - V15 - 112019Shah Aizat RazaliNo ratings yet
- Operation Theatre DetailsDocument6 pagesOperation Theatre Detailsafrin banuNo ratings yet
- An 0087Document24 pagesAn 0087lm pronNo ratings yet
- Loop Telecommunication International, Inc.: Topic Search Loop S Total SolutionDocument14 pagesLoop Telecommunication International, Inc.: Topic Search Loop S Total SolutionMofasser Ahmed (Tamal)No ratings yet
- Guidance of Install IPaso-compressedDocument26 pagesGuidance of Install IPaso-compressedYoung BloodNo ratings yet
- Acuvim II Series PDFDocument10 pagesAcuvim II Series PDFJimmy Floyd HasselbainkNo ratings yet
- Analysis and Management of Production System: Lesson 05: Organizational ArrangementDocument21 pagesAnalysis and Management of Production System: Lesson 05: Organizational ArrangementEnri GjondrekajNo ratings yet
- Computer Architecture: Introduction To The Concept of Pipelined ProcessorDocument20 pagesComputer Architecture: Introduction To The Concept of Pipelined ProcessorSwarup EpariNo ratings yet
- 8cyl 8coil ExtDocument1 page8cyl 8coil ExtwallyNo ratings yet
- L12 SuperscalarDocument25 pagesL12 SuperscalarKUMAR HIMANSHUNo ratings yet
- Dpu4f SiDocument21 pagesDpu4f SiApurba RoyNo ratings yet
- OM-EL-USB-4 OM-EL-USB-4: Instruction SheetDocument7 pagesOM-EL-USB-4 OM-EL-USB-4: Instruction SheetElinton De Jesus SarmientoNo ratings yet
- Frontload Bill Validator Operation and Service Manual Testing and RepairDocument171 pagesFrontload Bill Validator Operation and Service Manual Testing and Repairpablo bulzomiNo ratings yet
- Primaria Craiova: Inventory Summary: Summary of All Devices Categorized by Type (241 Items)Document11 pagesPrimaria Craiova: Inventory Summary: Summary of All Devices Categorized by Type (241 Items)iokuNo ratings yet
- 20342B - Advanced - Solutions - of - Microsoft - Exchange Server 2013 PDFDocument19 pages20342B - Advanced - Solutions - of - Microsoft - Exchange Server 2013 PDFhoinarelNo ratings yet
- Artificial Intelligence (AI) Software Expansion For STM32CubeDocument8 pagesArtificial Intelligence (AI) Software Expansion For STM32CubeNewRiverXNo ratings yet
- Rta-Fousb-Mon: On This PageDocument14 pagesRta-Fousb-Mon: On This PageEng M ElseaidyNo ratings yet
- Network-Aware Virtual Machine PlacementDocument58 pagesNetwork-Aware Virtual Machine PlacementZNo ratings yet
- NHCT - C4 - Giao Tiep LCD 4 BitDocument17 pagesNHCT - C4 - Giao Tiep LCD 4 BitNguyễn Đỗ Thiên TriệuNo ratings yet
- Micro Program ControlDocument27 pagesMicro Program ControlSyed Rasheed uddinNo ratings yet
- ESP8266 Tutorial: Build An Automatic Plant Watering System: InstructablesDocument6 pagesESP8266 Tutorial: Build An Automatic Plant Watering System: InstructablessarkochileNo ratings yet
- Lec 2 Layered ArchitectureDocument8 pagesLec 2 Layered ArchitectureRana HeshamNo ratings yet
- Computer PartsDocument36 pagesComputer PartsJed SorollaNo ratings yet
- SOUE01 Wii0.iniDocument3 pagesSOUE01 Wii0.ini2165 Atharv DeshmukhNo ratings yet
- Unit 4 Introduction To ARM CORTEX M4Document84 pagesUnit 4 Introduction To ARM CORTEX M4chetansawant8112003No ratings yet
- ES Final Jan10 PDFDocument6 pagesES Final Jan10 PDFKaemryn SaeNo ratings yet
- Features: High-Speed SDR Sdram Controller Core For Actel FpgasDocument6 pagesFeatures: High-Speed SDR Sdram Controller Core For Actel FpgasSvraghava SripathiNo ratings yet
- Satellite A305 Detailed Product SpecificationDocument4 pagesSatellite A305 Detailed Product Specification'Douglas SilvaNo ratings yet
- Faculty of EngineeringDocument2 pagesFaculty of EngineeringMohamed AlfarashNo ratings yet
- ProsTE Basic ManualDocument20 pagesProsTE Basic ManualNadeem HaddadNo ratings yet
- LNL-X2220: Intelligent Dual Reader ControllerDocument2 pagesLNL-X2220: Intelligent Dual Reader ControllerSushil TewatiaNo ratings yet
- Determine Maintenace StrategyDocument18 pagesDetermine Maintenace StrategyJalel Bejo GudinaNo ratings yet
- Understanding The Architecture and Application of Xilinx ZynqDocument16 pagesUnderstanding The Architecture and Application of Xilinx ZynqjackNo ratings yet
- Commodore 1541 Troubleshooting and Repair GuideDocument238 pagesCommodore 1541 Troubleshooting and Repair GuideoobkysfwqtkcfhafvkNo ratings yet
- MWU2030FNSH User's ManualDocument50 pagesMWU2030FNSH User's ManualptlsNo ratings yet
- Union Demo File Superstore M6tacDocument211 pagesUnion Demo File Superstore M6tacSreeraj ThekkethilNo ratings yet
- Datasheet Sensor DS18B20Document21 pagesDatasheet Sensor DS18B20DAYANA CAROLINA PARDO DELGADONo ratings yet
- Buy Zeuslap 15.6inch Touch Panel Portable Monitor Usb Type C Hdmi Portable Computer Touch Monitor For ps4 Switch Xbox One Laptop Phone OnlineDocument26 pagesBuy Zeuslap 15.6inch Touch Panel Portable Monitor Usb Type C Hdmi Portable Computer Touch Monitor For ps4 Switch Xbox One Laptop Phone OnlinesigniferNo ratings yet
- hcpb7 v7r1Document2,296 pageshcpb7 v7r1Jose Gregorio Vivas LemusNo ratings yet