You might also like
- Adjustment Instructions: RobotDocument21 pagesAdjustment Instructions: RobotNicolas MolinaNo ratings yet
- KukaDocument13 pagesKukaadamczykbMDSNo ratings yet
- EC 120 Adjustment Using The STEADYControl Adjustment Equipment - Cabin Antivibrators (AMM 53-37-00, 5-2)Document16 pagesEC 120 Adjustment Using The STEADYControl Adjustment Equipment - Cabin Antivibrators (AMM 53-37-00, 5-2)Latest RumorNo ratings yet
- Engine Valve Lash - Inspect/Adjust: Shutdown SIS Previous ScreenDocument4 pagesEngine Valve Lash - Inspect/Adjust: Shutdown SIS Previous ScreenbejoythomasNo ratings yet
- Valve 950h PDFDocument5 pagesValve 950h PDFabdelrhmangbr86No ratings yet
- Juego de Valvulas C27Document4 pagesJuego de Valvulas C27gerardoNo ratings yet
- Engine Valve Lash - Inspect/Adjust: Shutdown SIS Previous ScreenDocument5 pagesEngine Valve Lash - Inspect/Adjust: Shutdown SIS Previous ScreenaliNo ratings yet
- Adjust Valve Lash 777EDocument3 pagesAdjust Valve Lash 777EAgung WicaksonoNo ratings yet
- Engine Valve LashDocument3 pagesEngine Valve LashImron Alif100% (3)
- XQ89-3C Operation Manual (English)Document36 pagesXQ89-3C Operation Manual (English)corvin volocaruNo ratings yet
- D10T Valve LAsh AdjustDocument3 pagesD10T Valve LAsh AdjustSyahdiNo ratings yet
- Troca de Governor e AtuadorDocument4 pagesTroca de Governor e AtuadorrodineiNo ratings yet
- 8013 Instruction Manual For Camflex and VarimaxDocument10 pages8013 Instruction Manual For Camflex and Varimaxtoche33No ratings yet
- Engine Valve Lash - Inspect/AdjustDocument4 pagesEngine Valve Lash - Inspect/AdjustHrvoje ŠkaricaNo ratings yet
- C-12 Industrial Engine BDL00001-UP (SEBP3252 - 59) - Reglages SoupapesDocument4 pagesC-12 Industrial Engine BDL00001-UP (SEBP3252 - 59) - Reglages SoupapesDamien LEGRANDNo ratings yet
- 2.F2097Inspection MaintCheckList10302013Document66 pages2.F2097Inspection MaintCheckList10302013ArisNo ratings yet
- Roller Circle - Check and AdjustDocument3 pagesRoller Circle - Check and AdjustGilney FreitasNo ratings yet
- CAT C27 - C32 Ajuste La Luz de ValvulasDocument5 pagesCAT C27 - C32 Ajuste La Luz de ValvulasGdar KbzaNo ratings yet
- Adjustment ManualDocument32 pagesAdjustment ManualMike ObrienNo ratings yet
- Ajuste Valvula 3176CDocument3 pagesAjuste Valvula 3176CAdelio RamirezNo ratings yet
- Axis & Ball Screw InspectionDocument15 pagesAxis & Ball Screw InspectionPham LongNo ratings yet
- Torque SpecificationsDocument50 pagesTorque SpecificationsNilton sergio gomes lins100% (1)
- Pruebas y Ajustes C27 and C32 GeneratorDocument5 pagesPruebas y Ajustes C27 and C32 GeneratorMuhammad Ary safarta100% (1)
- Kenr8577 00 01 AllDocument20 pagesKenr8577 00 01 AlldavidNo ratings yet
- Unit Injector Synchronization - Adjust: 3114, 3116 and 3126 Industrial, Marine and Generator Set EnginesDocument6 pagesUnit Injector Synchronization - Adjust: 3114, 3116 and 3126 Industrial, Marine and Generator Set EnginesChristian Vinueza VillavicencioNo ratings yet
- STROBEL 3100 Mechanics InstructionsDocument40 pagesSTROBEL 3100 Mechanics InstructionsHadi KurniawanNo ratings yet
- Me 02 23 01 enDocument16 pagesMe 02 23 01 enNicolas MolinaNo ratings yet
- Ajuste Valvulas 9NZDocument5 pagesAjuste Valvulas 9NZLuis OcampoNo ratings yet
- MH5 MH5 SM 0711 PDFDocument33 pagesMH5 MH5 SM 0711 PDFclaygonNo ratings yet
- Sony Micro MV Mechanical Adjustment Manual 1 V Mechanism V PDFDocument48 pagesSony Micro MV Mechanical Adjustment Manual 1 V Mechanism V PDFFrank GonzalezNo ratings yet
- Motorised Unit: Changeover Switch Installation and Operation GuideDocument20 pagesMotorised Unit: Changeover Switch Installation and Operation GuideStalin Paul Rodriguez LeonNo ratings yet
- Engine Valve Lash ADJUST C27 C32Document5 pagesEngine Valve Lash ADJUST C27 C32manu luvunga100% (1)
- Valve Lash 1Document4 pagesValve Lash 1Daniel TekleNo ratings yet
- Kenr5814!00!01-All Spec PTDocument62 pagesKenr5814!00!01-All Spec PTrafaelNo ratings yet
- Actuator - 655R IOMDocument14 pagesActuator - 655R IOMvkeie0206No ratings yet
- Actuator 657Document24 pagesActuator 657DineshNo ratings yet
- Cat C 15 Valve Lash ProcedureDocument5 pagesCat C 15 Valve Lash ProcedureTroy Smith90% (20)
- Caterpillar Cat M322D Wheeled Excavator (Prefix W2S) Service Repair Manual (W2S00001 and Up) PDFDocument22 pagesCaterpillar Cat M322D Wheeled Excavator (Prefix W2S) Service Repair Manual (W2S00001 and Up) PDFfkdmma100% (1)
- Qdoc - Tips Calibracion Valvulas Motor c12 CaterpillarDocument5 pagesQdoc - Tips Calibracion Valvulas Motor c12 CaterpillarJoel MendezNo ratings yet
- Brochure of Gear BoxDocument66 pagesBrochure of Gear BoxtizeskiNo ratings yet
- UniversalDocument11 pagesUniversalAnonymous TYGiADNo ratings yet
- Front Wheel Drive Axle For TLD 828, 929 & TXL-838 Cargo LoadersDocument30 pagesFront Wheel Drive Axle For TLD 828, 929 & TXL-838 Cargo LoadersCarlos SolisNo ratings yet
- Kone Step ChainDocument6 pagesKone Step Chaindaniel cooperNo ratings yet
- C2600 Operating InstructionsDocument12 pagesC2600 Operating InstructionsEduardo PérezNo ratings yet
- 43 JH 9 UmDocument58 pages43 JH 9 Umcyber02000No ratings yet
- 160 Electric Chain Hoist Ysl Ysh Yse Ysf Yet Ylt YhtDocument59 pages160 Electric Chain Hoist Ysl Ysh Yse Ysf Yet Ylt YhtPaul Gomez100% (1)
- G-5500 Im Eng E12901004Document12 pagesG-5500 Im Eng E12901004ampetreNo ratings yet
- Autogard Series 820 Torque Limiter: Installation and Maintenance InstructionsDocument16 pagesAutogard Series 820 Torque Limiter: Installation and Maintenance InstructionsIvana Z. OgnjanovićNo ratings yet
- Speed Sensor - AdjustDocument6 pagesSpeed Sensor - AdjustЕвгений АбрамовNo ratings yet
- Caterpillar Cat 330B L EXCAVATOR (Prefix 1JS) Service Repair Manual (1JS00001 and Up)Document26 pagesCaterpillar Cat 330B L EXCAVATOR (Prefix 1JS) Service Repair Manual (1JS00001 and Up)kfm8seuuduNo ratings yet
- Selladora de Cajas de Carton - EXC-103TBDocument26 pagesSelladora de Cajas de Carton - EXC-103TBMarco Antonio Pereira BustosNo ratings yet
- MA0686EHG1 Instruction Manual (English) - TW2180BRF5Document77 pagesMA0686EHG1 Instruction Manual (English) - TW2180BRF5Leadec LumelNo ratings yet
- SAMSON PositionerDocument60 pagesSAMSON PositionerJaco SerfonteinNo ratings yet
- Calibracion Valvulas Motor c12 CaterpillarDocument5 pagesCalibracion Valvulas Motor c12 CaterpillarOmar Diaz Segura100% (1)
- Calibracion Valvulas Motor C12 CaterpillarDocument5 pagesCalibracion Valvulas Motor C12 CaterpillarRamón José Aponte Franco100% (9)
- A111 89ND-NGSDocument17 pagesA111 89ND-NGSMuhammad Idrees ArainNo ratings yet
- Anajet-Mpower-I Service-ManualDocument98 pagesAnajet-Mpower-I Service-Manualandrea.laboratorioNo ratings yet
- Ajuste de Válvulas e PonteDocument4 pagesAjuste de Válvulas e Pontewagner_guimarães_1No ratings yet
- SC Perthub Single Cell OmicsDocument34 pagesSC Perthub Single Cell OmicsGANYA U 2022 Batch,PES UniversityNo ratings yet
- Java Lab Assignment.Document2 pagesJava Lab Assignment.KAYNo ratings yet
- 3x Exemplar 2017 en PDFDocument4 pages3x Exemplar 2017 en PDFgudzalovNo ratings yet
- Mech LND 17.0 M06 Response Spectrum AnalysisDocument64 pagesMech LND 17.0 M06 Response Spectrum AnalysisKubilayNo ratings yet
- Allison 1,000 & 2,000 Group 21Document4 pagesAllison 1,000 & 2,000 Group 21Robert WhooleyNo ratings yet
- Disc Brake System ReportDocument20 pagesDisc Brake System ReportGovindaram Rajesh100% (1)
- Incompressible Flow in Pipe Networks.Document7 pagesIncompressible Flow in Pipe Networks.Ayub Ali WehelieNo ratings yet
- Excel NotesDocument9 pagesExcel NotesAhnNo ratings yet
- Chapter 6 AssignmentDocument6 pagesChapter 6 AssignmentRohit RajeevNo ratings yet
- Ampla's Technology ArchitectureDocument4 pagesAmpla's Technology ArchitecturesyeadtalhaaliNo ratings yet
- Basic Electronics Lab ManualDocument47 pagesBasic Electronics Lab ManualAlpesh ThesiyaNo ratings yet
- 2023-1509 TopSolid'Design Library Designer's GuideDocument21 pages2023-1509 TopSolid'Design Library Designer's GuideMáy TiệnNo ratings yet
- Fire Dynamic Damper Installation InstructionsDocument18 pagesFire Dynamic Damper Installation InstructionsJohnMerrNo ratings yet
- Bubble Sort ExampleDocument7 pagesBubble Sort Examplenur_anis_8No ratings yet
- Review Paper On Distributed ArchitectureDocument28 pagesReview Paper On Distributed ArchitectureWeb GuruNo ratings yet
- Pile FoundationDocument38 pagesPile FoundationChowdhury PriodeepNo ratings yet
- Notes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFDocument9 pagesNotes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFRahul ChauhanNo ratings yet
- Tutorial 1 SolutionsDocument4 pagesTutorial 1 Solutionsteju1996coolNo ratings yet
- Gen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Document13 pagesGen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Angeline TumananNo ratings yet
- Spare Parts List: Hydraulic BreakerDocument28 pagesSpare Parts List: Hydraulic BreakerTeknik MakinaNo ratings yet
- Tech Specs - TC 5540 PDFDocument2 pagesTech Specs - TC 5540 PDFziaarkiplanNo ratings yet
- CCNA2 Lab 7 3 8 enDocument6 pagesCCNA2 Lab 7 3 8 enapi-3809703100% (1)
- Motionless Electromagnetic GeneratorDocument8 pagesMotionless Electromagnetic Generatorraja100% (1)
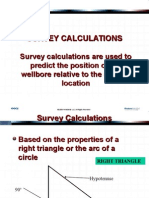
- 02 Survey Calculations - PpsDocument96 pages02 Survey Calculations - PpsLeo Ivan Aviles RicaldiNo ratings yet
- Bhagwat Gita in by EB KarkiDocument97 pagesBhagwat Gita in by EB KarkiYogaguru Mohan100% (1)
- Grade 12 Differentiation CHPT 7 & 8Document60 pagesGrade 12 Differentiation CHPT 7 & 8Sri Devi NagarjunaNo ratings yet
- Balancing of Reciprocating MassesDocument74 pagesBalancing of Reciprocating MassesBharaniSai100% (1)
- KD-131 Asme Viii Div3Document2 pagesKD-131 Asme Viii Div3comar85No ratings yet
- 003pcu3001 Baja California - JMH - v4 PDFDocument15 pages003pcu3001 Baja California - JMH - v4 PDFEmir RubliovNo ratings yet