You might also like
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Derivatives and ApplicationDocument14 pagesDerivatives and Applicationmuhammed shwanyNo ratings yet
- Ceit DEDocument69 pagesCeit DEClint MosenabreNo ratings yet
- Rules of Differentiation: 1. Constant Function RuleDocument18 pagesRules of Differentiation: 1. Constant Function RuleZhiYar NamiqNo ratings yet
- Deriving The Differentiation RulesDocument6 pagesDeriving The Differentiation RulesKaye Celino100% (1)
- Techniques of DifferentationDocument62 pagesTechniques of DifferentationFeridinand ThainisNo ratings yet
- Integrating Factor CP 7Document28 pagesIntegrating Factor CP 7Alek Al HadiNo ratings yet
- CalculusDocument8 pagesCalculusWalwal WalwalNo ratings yet
- Mod4-The Definite Integral Methods of IntegrationDocument15 pagesMod4-The Definite Integral Methods of Integrationjerick.magadiaNo ratings yet
- AET Math Camp 2018 PDFDocument72 pagesAET Math Camp 2018 PDFLee RickHunterNo ratings yet
- Application of Integral Calculus NotesDocument17 pagesApplication of Integral Calculus Notesmechabuild.engineeringNo ratings yet
- 3DFV15 ScientificDocument36 pages3DFV15 ScientificMahendra PatelNo ratings yet
- Stochastic Simulation and Power Analysis: ©2006 Ben Bolker August 3, 2007Document25 pagesStochastic Simulation and Power Analysis: ©2006 Ben Bolker August 3, 2007juntujuntuNo ratings yet
- Differential Equations Module 2023 2024Document16 pagesDifferential Equations Module 2023 2024Kelly FajardoNo ratings yet
- Formal Predicate CalculusDocument34 pagesFormal Predicate CalculusAhmad AlhourNo ratings yet
- Q4 WEEK5 Basic CAL MOD 13Document11 pagesQ4 WEEK5 Basic CAL MOD 13Mariel Anne Distor TomacderNo ratings yet
- 5721 GalleyDocument6 pages5721 GalleyJohn MammanNo ratings yet
- Applied Mathematics and MechanicsDocument10 pagesApplied Mathematics and MechanicsWillian Martins FerreiraNo ratings yet
- EPM 5131 Unit 3 DifferentiationDocument7 pagesEPM 5131 Unit 3 DifferentiationDivine MunsakaNo ratings yet
- 1 Time FractionalDocument28 pages1 Time FractionalBoutiara AbdellatifNo ratings yet
- Anti DerivativesDocument21 pagesAnti DerivativesHanna GalatiNo ratings yet
- Differentiation of Algebraic Functions (2)Document17 pagesDifferentiation of Algebraic Functions (2)Jayjo SegundoNo ratings yet
- MTH 102 Calculus - II-Topic 2-The Fundamental Theorem of CalculusDocument23 pagesMTH 102 Calculus - II-Topic 2-The Fundamental Theorem of CalculusDestroy GameNo ratings yet
- Introduction To CalculusDocument10 pagesIntroduction To CalculusKez MaxNo ratings yet
- Backward Forward PropogationDocument19 pagesBackward Forward PropogationConrad WaluddeNo ratings yet
- Physical Meaning of Lagrange Multipliers - Hasan KarabulutDocument15 pagesPhysical Meaning of Lagrange Multipliers - Hasan KarabulutAlexandros TsourosNo ratings yet
- BCSLHT Release4Document12 pagesBCSLHT Release4Elixa FranciscoNo ratings yet
- Chapitre 2 PDFDocument17 pagesChapitre 2 PDFMouhaNo ratings yet
- Conformal THDocument83 pagesConformal THofelijasevenNo ratings yet
- Topic 3 - CS - Part 2Document24 pagesTopic 3 - CS - Part 2Teo ShengNo ratings yet
- General Mathematics 5 (Exponential Functions)Document48 pagesGeneral Mathematics 5 (Exponential Functions)Kevan jaymes KatipunanNo ratings yet
- Differentiation - Fy - Sem 1-2015-16Document12 pagesDifferentiation - Fy - Sem 1-2015-16Yash GyanchandaniNo ratings yet
- LP 1 in Math 2Document23 pagesLP 1 in Math 2Walwal WalwalNo ratings yet
- A Proximal Method Solve Quasiconvex-UltimoDocument6 pagesA Proximal Method Solve Quasiconvex-UltimoArturo Morales SolanoNo ratings yet
- G11 - Q3 - LAS - Week1 - L1.2-1.3 - Basic CalculusDocument16 pagesG11 - Q3 - LAS - Week1 - L1.2-1.3 - Basic CalculusFranzhean Balais CuachonNo ratings yet
- 1589222915-05 - Introduction To Differential EquationsDocument47 pages1589222915-05 - Introduction To Differential EquationsfranklinNo ratings yet
- Final NoteDocument23 pagesFinal NoteSandeep SahaNo ratings yet
- Mo OculusDocument119 pagesMo Oculusenugraha01No ratings yet
- 5 1532157023 - 21-07-2018 PDFDocument8 pages5 1532157023 - 21-07-2018 PDFRahul SharmaNo ratings yet
- Module 6Document11 pagesModule 6shaina sucgangNo ratings yet
- Solving Systems of Fractional Differential EquatioDocument11 pagesSolving Systems of Fractional Differential EquatioamonateeyNo ratings yet
- Unit5 Differentiation FormulasDocument11 pagesUnit5 Differentiation FormulasDylan AngelesNo ratings yet
- QUARTER - 3 - / SEMESTER - 2nd - Week 7Document10 pagesQUARTER - 3 - / SEMESTER - 2nd - Week 7Tristan Paul PagalananNo ratings yet
- MTHS111 Lesson1 2024Document24 pagesMTHS111 Lesson1 2024pphelokazi54No ratings yet
- Lógica Fuzzy MestradoDocument15 pagesLógica Fuzzy Mestradoaempinto028980No ratings yet
- General Math 12 (W1)Document17 pagesGeneral Math 12 (W1)Gregorio RizaldyNo ratings yet
- 1 2 - Represent Real Life Situations - Evaluating - FunctionsDocument29 pages1 2 - Represent Real Life Situations - Evaluating - FunctionsryanneNo ratings yet
- Adequacy of Solutions - : After Reading This Chapter, You Will Be Able ToDocument15 pagesAdequacy of Solutions - : After Reading This Chapter, You Will Be Able TokesslerNo ratings yet
- A Higher-Order Structure Tensor: Thomas Schultz, Joachim Weickert, and Hans-Peter SeidelDocument29 pagesA Higher-Order Structure Tensor: Thomas Schultz, Joachim Weickert, and Hans-Peter SeidelMay Nicolas100% (1)
- 1 s2.0 S016501142400109X MainDocument13 pages1 s2.0 S016501142400109X Mainhovu.hutechNo ratings yet
- CH 3 Multiple Linear Regression Analysis Autosaved RecoveredDocument26 pagesCH 3 Multiple Linear Regression Analysis Autosaved Recoveredwudnehkassahun97No ratings yet
- Linearization Ch08Document26 pagesLinearization Ch08Chegrani AhmedNo ratings yet
- "FLAC" ': Acquisition of Skills For L Use ofDocument43 pages"FLAC" ': Acquisition of Skills For L Use ofmoin4cuetNo ratings yet
- CH - 4 - Econometrics UGDocument33 pagesCH - 4 - Econometrics UGMewded DelelegnNo ratings yet
- The Renormalization Group and The Diffusion Equation: Masami Matsumoto, Gota Tanaka, and Asato TsuchiyaDocument13 pagesThe Renormalization Group and The Diffusion Equation: Masami Matsumoto, Gota Tanaka, and Asato TsuchiyapedroNo ratings yet
- Class Notes - CalculusDocument31 pagesClass Notes - CalculusRyan GilbertNo ratings yet
- Simple Differentiation and IntegrationDocument16 pagesSimple Differentiation and IntegrationDragos FotacheNo ratings yet
- The γ-Dimension of Images of Bi-Lipschitz Function: Journal of Physics: Conference SeriesDocument7 pagesThe γ-Dimension of Images of Bi-Lipschitz Function: Journal of Physics: Conference SeriesLucas Venâncio da Silva SantosNo ratings yet
- Group 5 Mathematics Fo EconomicsDocument34 pagesGroup 5 Mathematics Fo Economicscahaya islamNo ratings yet
- ID Analisis Varian Dua Faktor Dalam RancangDocument10 pagesID Analisis Varian Dua Faktor Dalam Rancangcahaya islamNo ratings yet
- Pengembangan InstrumenDocument18 pagesPengembangan InstrumenJulian TambunanNo ratings yet
- Strategi Memenangkan Hibah Penelitian Nasional Dan Internasional Baharuddin S.Pd.,M.Pd.Document1 pageStrategi Memenangkan Hibah Penelitian Nasional Dan Internasional Baharuddin S.Pd.,M.Pd.cahaya islamNo ratings yet
- Abstract: The Education System of Malang Regulating The New StudentDocument10 pagesAbstract: The Education System of Malang Regulating The New Studentcahaya islamNo ratings yet
- Vlat PDFDocument10 pagesVlat PDFcahaya islamNo ratings yet
- 1.03 Teori Belajar Dan MotivasiDocument17 pages1.03 Teori Belajar Dan Motivasicahaya islamNo ratings yet
- Questions - Homework - 10th - Science - 2021-11-24T05 - 39Document14 pagesQuestions - Homework - 10th - Science - 2021-11-24T05 - 39Saurabh BhattacharyaNo ratings yet
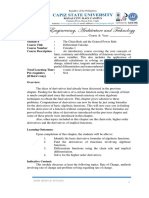
- Source of Information Electrical Transmit Optical SourceDocument37 pagesSource of Information Electrical Transmit Optical SourcesubashNo ratings yet
- Introducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDocument8 pagesIntroducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDavid C HouserNo ratings yet
- Math Makes Sense Practice and Homework Book Grade 5 AnswersDocument8 pagesMath Makes Sense Practice and Homework Book Grade 5 Answerseh041zef100% (1)
- Fractional DistillationDocument7 pagesFractional DistillationInspector Chulbul PandayNo ratings yet
- ADMN-2-002, Issue 01, Procedure For Personal Hygiene, Employee Facility and HousekeepingDocument4 pagesADMN-2-002, Issue 01, Procedure For Personal Hygiene, Employee Facility and HousekeepingSmsajid WaqasNo ratings yet
- Crime Scene Power PointDocument31 pagesCrime Scene Power PointAya ChouaibNo ratings yet
- Bending Machine Sustarin Rollers Nargesa - 4Document1 pageBending Machine Sustarin Rollers Nargesa - 4yossef albanaNo ratings yet
- Mathematics, Science, and Technology - Module 1Document6 pagesMathematics, Science, and Technology - Module 1Dale CalicaNo ratings yet
- Do Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StanceDocument3 pagesDo Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StancenonononowayNo ratings yet
- Top Renewable Energy Trends of 2018: Madeleine HoweDocument4 pagesTop Renewable Energy Trends of 2018: Madeleine HowedubryNo ratings yet
- Descriptive TextDocument3 pagesDescriptive TextcaaaaaNo ratings yet
- Exhibitorlist Interz20 enDocument42 pagesExhibitorlist Interz20 enLindsay CatariNo ratings yet
- Causes and Detection of Damages - Avinashtaru7129 - OfficialDocument13 pagesCauses and Detection of Damages - Avinashtaru7129 - Officialpratik sawantNo ratings yet
- Magic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilityDocument19 pagesMagic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilitymewarulesNo ratings yet
- 5 Fit Tolerances-Problem SolvingDocument10 pages5 Fit Tolerances-Problem SolvingSHIVANANDA DALEINo ratings yet
- PSSR Pre-Commissioning SafetyDocument6 pagesPSSR Pre-Commissioning SafetymanuNo ratings yet
- ISO 14031 Environmental Performance EvaluationDocument65 pagesISO 14031 Environmental Performance EvaluationSanjayaNo ratings yet
- PHD Thesis: Ing. Petru BoloşDocument33 pagesPHD Thesis: Ing. Petru BoloşSenatorul Melcilor100% (1)
- Propositions: A. Learning Outcome Content StandardDocument9 pagesPropositions: A. Learning Outcome Content StandardMarc Joseph NillasNo ratings yet
- PSE PG Structure ModifedDocument61 pagesPSE PG Structure ModifedAnkit YadavNo ratings yet
- A Study On Five International Scientists: Micro Project ReportDocument18 pagesA Study On Five International Scientists: Micro Project ReportAishwarya MohanNo ratings yet
- Short CV RJCDocument3 pagesShort CV RJCShivani KhannaNo ratings yet
- Handbook of Music and Emotion Theory Research Applications 0199230145 9780199230143 CompressDocument990 pagesHandbook of Music and Emotion Theory Research Applications 0199230145 9780199230143 CompressSmyth1702No ratings yet
- Esia Report: Sustainable Akkar Wind Farm, LebanonDocument738 pagesEsia Report: Sustainable Akkar Wind Farm, LebanonAnderson Martins Dos SantosNo ratings yet
- Mes 038Document9 pagesMes 038MimiNo ratings yet
- Introduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1Document143 pagesIntroduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1bayou71usaNo ratings yet
- Hirac (Manhole Installation)Document7 pagesHirac (Manhole Installation)tana50% (2)
- Our Journey Towards A Greener Giraffe Centre ArticleDocument1 pageOur Journey Towards A Greener Giraffe Centre ArticleBreezy YegaNo ratings yet
- MR Right - Case Study Test - Summer 2018Document7 pagesMR Right - Case Study Test - Summer 2018jadenNo ratings yet