You might also like
- Chapter 18 Matrix Methods in Paraxial OpticsDocument28 pagesChapter 18 Matrix Methods in Paraxial Opticsjai singhNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- Optoelectronics: Ray OpticsDocument22 pagesOptoelectronics: Ray OpticsEbenezer AkpariboNo ratings yet
- Stereo Vision DpatraDocument91 pagesStereo Vision DpatraRitunjay GuptaNo ratings yet
- GEO 2204: Photogrammetry I: Magemeso IbrahimDocument95 pagesGEO 2204: Photogrammetry I: Magemeso IbrahimKarungi AroneNo ratings yet
- Full Package - EPDocument178 pagesFull Package - EPretterateNo ratings yet
- Module 4Document36 pagesModule 4MD SHAHRIARMAHMUDNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- Lecture16 StereoDocument41 pagesLecture16 StereoKarthik UppuluriNo ratings yet
- ElectrodynamicsDocument35 pagesElectrodynamicsRajuNo ratings yet
- EE340 Week4 Ch3 AhmedDocument46 pagesEE340 Week4 Ch3 AhmedMo7RahiNo ratings yet
- 3.7 Linear RegressionDocument2 pages3.7 Linear RegressionRajaNo ratings yet
- Circular Functions and TrigonometryDocument6 pagesCircular Functions and TrigonometryLorraine SabbaghNo ratings yet
- Lec 6Document5 pagesLec 6stathiss11No ratings yet
- T8 - Root Locus Technique - 2021Document51 pagesT8 - Root Locus Technique - 2021James ChanNo ratings yet
- Analytical AT-3Document48 pagesAnalytical AT-3BELAY TAFACHUNo ratings yet
- Circula.-Circular Functions and Its Domain and Range-01Document6 pagesCircula.-Circular Functions and Its Domain and Range-01lei luxNo ratings yet
- 10) PetzvalTheorem (2-6-13)Document6 pages10) PetzvalTheorem (2-6-13)Felipe Ademir Aleman HdezNo ratings yet
- Lecture-921-NW FunctionsDocument12 pagesLecture-921-NW FunctionsBangle ChNo ratings yet
- Linear Wire Antennas: EE-4382/5306 - Antenna EngineeringDocument24 pagesLinear Wire Antennas: EE-4382/5306 - Antenna EngineeringJose Nathaniel BonaNo ratings yet
- L7.Image GeometryDocument47 pagesL7.Image GeometryApple ForScaleNo ratings yet
- Formula Sheet PHY303 LDocument2 pagesFormula Sheet PHY303 Lnyny nyNo ratings yet
- 10 StereoDocument131 pages10 StereoUdaranga WickramasingheNo ratings yet
- DielectricDocument26 pagesDielectricTawsiful AlamNo ratings yet
- Modelling and Simulation of Mechatronic SystemsDocument11 pagesModelling and Simulation of Mechatronic SystemsAntonio CaciciaNo ratings yet
- 10 PP Ynm Phy103 2021 IiDocument2 pages10 PP Ynm Phy103 2021 IiRAJ MEENANo ratings yet
- Robotics Lec3Document58 pagesRobotics Lec3aaNo ratings yet
- Lec 7Document6 pagesLec 7stathiss11No ratings yet
- CHAPTER 10 - Deflection Work-Energy Methods (Part 1)Document7 pagesCHAPTER 10 - Deflection Work-Energy Methods (Part 1)Joshua John JulioNo ratings yet
- Geometrical Optics 4 5Document54 pagesGeometrical Optics 4 5AshishNo ratings yet
- Multiple View GeometryDocument42 pagesMultiple View Geometry李金良No ratings yet
- Dynamics03 - Rotation MatricesDocument58 pagesDynamics03 - Rotation MatricesagfjtrsNo ratings yet
- Optics 5 6 Geometrical Optics 2Document48 pagesOptics 5 6 Geometrical Optics 2AshishNo ratings yet
- Solution For HOMEWORK 4Document5 pagesSolution For HOMEWORK 4Rau Lance CunananNo ratings yet
- EM Waves ReflectionDocument38 pagesEM Waves ReflectionHimanshu ShekharNo ratings yet
- Ec8701 Ame Unit-2 NotesDocument174 pagesEc8701 Ame Unit-2 Notesajaykarthicsp.ece2020No ratings yet
- Computer Vision - Camera GeometryDocument35 pagesComputer Vision - Camera GeometryRicoenrico widaNo ratings yet
- Motion Computing in Image Analysis: - Mani V Thomas CISC 489/689Document36 pagesMotion Computing in Image Analysis: - Mani V Thomas CISC 489/689venkithebossNo ratings yet
- Lecture 2 - Description (00-12-01)Document50 pagesLecture 2 - Description (00-12-01)MahdiNo ratings yet
- Dynamics07 - Velocities and Accelarations in Rotating FramesDocument37 pagesDynamics07 - Velocities and Accelarations in Rotating FrameshamalNo ratings yet
- 2D Plane StressDocument21 pages2D Plane StressPankaj MehtaNo ratings yet
- Motion in A Straight Line JEE EnzzDocument64 pagesMotion in A Straight Line JEE EnzzfailurewasteworthlessNo ratings yet
- Lecture 2 BDocument35 pagesLecture 2 BWolf DragonneNo ratings yet
- Lec3 StereoGeometryDocument53 pagesLec3 StereoGeometryTeka MNo ratings yet
- P2 Chp5 RadiansDocument28 pagesP2 Chp5 RadiansWaqas KhanNo ratings yet
- Poster at PIDocument1 pagePoster at PI张泽华No ratings yet
- Why Camera Modeling?: Image ProcessingDocument10 pagesWhy Camera Modeling?: Image ProcessingRaju BhaiNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- Design Via Root LocusDocument53 pagesDesign Via Root LocusAhmed ShareefNo ratings yet
- LectureDocument77 pagesLectureSougata HalderNo ratings yet
- Antenna Sh4Document1 pageAntenna Sh4refaatNo ratings yet
- Daniel StereoDocument8 pagesDaniel StereoVan DucNo ratings yet
- Advanced Structural Models For 3D Stress Analysis of Laminated CompositesDocument18 pagesAdvanced Structural Models For 3D Stress Analysis of Laminated Compositeslekan4No ratings yet
- SA3 Module3 DirectStiffness-sDocument48 pagesSA3 Module3 DirectStiffness-sNeelima SanthoshNo ratings yet
- CE 255 HandoutDocument84 pagesCE 255 Handoutjmensah67No ratings yet
- Fundamentals of Image Forma1on: Lecture 2 Jitendra MalikDocument27 pagesFundamentals of Image Forma1on: Lecture 2 Jitendra MalikElisée Ndjabu DHNo ratings yet
- Class 03 Virtual WorldDocument31 pagesClass 03 Virtual WorldMounir BoukhiberNo ratings yet
- EPR: Is It Meta-Physics?Document11 pagesEPR: Is It Meta-Physics?Buffer AccountNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Gene-Definition, Concept of Gene-Classical and Modern ConceptsDocument4 pagesGene-Definition, Concept of Gene-Classical and Modern ConceptsAarthi shreeNo ratings yet
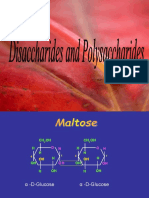
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Properties of Mono SacchardiesDocument16 pagesProperties of Mono SacchardiesAarthi shreeNo ratings yet
- Structure of MonosacchardiesDocument7 pagesStructure of MonosacchardiesAarthi shreeNo ratings yet
- M. AARTHI SHREE 2020012001: Answer KeyDocument3 pagesM. AARTHI SHREE 2020012001: Answer KeyAarthi shreeNo ratings yet
- Overview of Central Dogma of LifeDocument4 pagesOverview of Central Dogma of LifeAarthi shreeNo ratings yet
- Cambridge IGCSE ™: Additional Mathematics 0606/23Document11 pagesCambridge IGCSE ™: Additional Mathematics 0606/23ThePiecesFitNo ratings yet
- 5.1 Logic Statements and QuantifiersDocument16 pages5.1 Logic Statements and QuantifiersXeleen Elizabeth ArcaNo ratings yet
- LSK3701 - Notes Unit 1Document14 pagesLSK3701 - Notes Unit 1Annemarie RossouwNo ratings yet
- Assignment Control SystemDocument6 pagesAssignment Control SystemRobinsonNo ratings yet
- L-3 T-1 P-0 Total-4: Course No:1.1 Course Name: Credits ObjectiveDocument53 pagesL-3 T-1 P-0 Total-4: Course No:1.1 Course Name: Credits Objectivemieb svxsNo ratings yet
- 19 20 High School Course Offerings PDFDocument60 pages19 20 High School Course Offerings PDFsaule321No ratings yet
- Linear Programming PDFDocument3 pagesLinear Programming PDFmelissaNo ratings yet
- p6 Set1 Hkimofinals2023Document15 pagesp6 Set1 Hkimofinals2023MIRA DANIELLE NG100% (1)
- Lambert 2018Document115 pagesLambert 2018Jamsranjav EnkhbayarNo ratings yet
- Chapter 9pdeDocument18 pagesChapter 9pdeRa JatNo ratings yet
- Grade: Code Description Isbn PriceDocument16 pagesGrade: Code Description Isbn PricemohamedNo ratings yet
- Stage 1 Mathematics MethodDocument10 pagesStage 1 Mathematics Methodyolanda Sitepu100% (3)
- JLF Research ProposalDocument15 pagesJLF Research ProposalYerbua Onas LptNo ratings yet
- Ap Ab 1Document31 pagesAp Ab 1Mohammed AbdallahNo ratings yet
- Modelling Traffic Flow With Constant Speed Using The Galerkin Finite Element MethodDocument7 pagesModelling Traffic Flow With Constant Speed Using The Galerkin Finite Element MethodchrissbansNo ratings yet
- Class-12 Matrix WorksheetDocument3 pagesClass-12 Matrix WorksheetHemant ChaudharyNo ratings yet
- Dimensions and Dimensioning TypesDocument8 pagesDimensions and Dimensioning TypesKeertanaNo ratings yet
- Plane Geometry SeatworkDocument1 pagePlane Geometry SeatworkMarkAnthonyS.LopezNo ratings yet
- CFD Lecture 4: Dr. Thomas J. BarberDocument15 pagesCFD Lecture 4: Dr. Thomas J. BarberTareq DahbNo ratings yet
- Cbse 10 TH Maths Formulas Basic Algebraic IdentitiesDocument7 pagesCbse 10 TH Maths Formulas Basic Algebraic Identities10B-10.BHUMIKA KOCHARNo ratings yet
- Engineering Mathematics 4E MatreciesDocument23 pagesEngineering Mathematics 4E Matreciesأحمد كرارNo ratings yet
- (6.3) Solving Systems EliminationDocument29 pages(6.3) Solving Systems Eliminationgtan@icacademy.orgNo ratings yet
- 2600 Legarda St. Sampaloc, ManilaDocument4 pages2600 Legarda St. Sampaloc, ManilaLuz Anne de GuzmanNo ratings yet
- An Informal Introduction To Topos TheoryDocument24 pagesAn Informal Introduction To Topos TheorySergeiNo ratings yet
- CBSE Worksheet-57 CLASS - VIII Mathematics (Exponents and Powers)Document2 pagesCBSE Worksheet-57 CLASS - VIII Mathematics (Exponents and Powers)Raju singhNo ratings yet
- Integer Linear ProgrammingDocument13 pagesInteger Linear ProgrammingShazeb AsadNo ratings yet
- Fomcon ExtDocument13 pagesFomcon ExtjesvinNo ratings yet
- 2.3. Venn Diagrams & Set OperationsDocument10 pages2.3. Venn Diagrams & Set OperationsJestin ManaloNo ratings yet
- Statistical Techniques in Business and Economics 15th Edition Lind Solutions ManualDocument17 pagesStatistical Techniques in Business and Economics 15th Edition Lind Solutions Manualharveyadelaqblydh100% (30)
- Controller TuningDocument7 pagesController TuningsaxenanikitaNo ratings yet