You might also like
- Training ManualDocument41 pagesTraining Manualemiliow_1100% (3)
- Bartle Introduction To Real Analysis SolutionsDocument7 pagesBartle Introduction To Real Analysis SolutionsSam Sam65% (20)
- Linking ABAQUS With A FORTRAN Compiler For ABAQUS 2021 1Document6 pagesLinking ABAQUS With A FORTRAN Compiler For ABAQUS 2021 1Adnan AhmedNo ratings yet
- 1589865313232-Invoice 5177188319 PDFDocument1 page1589865313232-Invoice 5177188319 PDFAdnan AhmedNo ratings yet
- 1589865313232-Invoice 5177188319 PDFDocument1 page1589865313232-Invoice 5177188319 PDFAdnan AhmedNo ratings yet
- Eric Gamalinda - Amigo WarfareDocument88 pagesEric Gamalinda - Amigo Warfareenstone100% (1)
- Comstr D 23 00064Document29 pagesComstr D 23 00064Adnan AhmedNo ratings yet
- CM42023 (Israr Uddin)Document2 pagesCM42023 (Israr Uddin)Adnan AhmedNo ratings yet
- 2021 - D.Chatterjee - Composite Thin Skewed Hypar ShellsDocument13 pages2021 - D.Chatterjee - Composite Thin Skewed Hypar ShellsArpita SaxenaNo ratings yet
- Comparison of Practical Approaches For Modelling Shearwalls in Structural Analyses of BuildingsDocument8 pagesComparison of Practical Approaches For Modelling Shearwalls in Structural Analyses of Buildingskamel_riliNo ratings yet
- Composite Structures: Maria Sakovsky, Paolo Ermanni TDocument10 pagesComposite Structures: Maria Sakovsky, Paolo Ermanni TMohammed ElShaibNo ratings yet
- Ahmed - An Efficient Facet Shell Element With Layerwise Mechanics For Coupled - 2020Document14 pagesAhmed - An Efficient Facet Shell Element With Layerwise Mechanics For Coupled - 2020Adnan AhmedNo ratings yet
- Two Dimensional Static Mechanical Analysis of LamiDocument14 pagesTwo Dimensional Static Mechanical Analysis of LamiFongho Eric SinclairNo ratings yet
- Modelo Simplificado de Fibra para Analisis InelasticoDocument13 pagesModelo Simplificado de Fibra para Analisis InelasticoHollman Putoy LópezNo ratings yet
- Engineering Structures: SciencedirectDocument13 pagesEngineering Structures: SciencedirectNasar KhanNo ratings yet
- 2019 - Liu - Multilayer BCCDocument8 pages2019 - Liu - Multilayer BCCYusuf YamanerNo ratings yet
- Interlaminar fracture toughness approachDocument3 pagesInterlaminar fracture toughness approachAmiljkovicviNo ratings yet
- Nicolaides - 2015 - Modelling The Flexural Behaviour of Fibre Reinforced Concrete Beams With FEMDocument13 pagesNicolaides - 2015 - Modelling The Flexural Behaviour of Fibre Reinforced Concrete Beams With FEMMaría Elena García VázquezNo ratings yet
- Fa 2019Document13 pagesFa 2019NhanNo ratings yet
- Structural Design-Morphing AircraftDocument24 pagesStructural Design-Morphing Aircraftmuss21No ratings yet
- 4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsDocument12 pages4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsMayra ZezattiNo ratings yet
- 1 s2.0 S0020768314002625 MainDocument10 pages1 s2.0 S0020768314002625 Mainfederico lamonNo ratings yet
- Engineering Structures: Ehsan Nasiri, Yi LiuDocument14 pagesEngineering Structures: Ehsan Nasiri, Yi LiuMaruthish KvNo ratings yet
- Delft University of TechnologyDocument17 pagesDelft University of Technologyyong yangNo ratings yet
- Effective Stiffness, Strength, Buckling and Anisotropy of Foams Based On Nine Unique Triple Periodic Minimal SurfacesDocument21 pagesEffective Stiffness, Strength, Buckling and Anisotropy of Foams Based On Nine Unique Triple Periodic Minimal Surfaceskapilk80No ratings yet
- Thin-Walled Structures: Adnan Ahmed, Santosh KapuriaDocument14 pagesThin-Walled Structures: Adnan Ahmed, Santosh KapuriaAdnan AhmedNo ratings yet
- 1 s2.0 S0263822323009315 MainDocument17 pages1 s2.0 S0263822323009315 MainAbdelali YacoubiNo ratings yet
- Thesis YGuoDocument169 pagesThesis YGuoAlaa MansourNo ratings yet
- Modeling and Analysis of Anisogrid Lattice Structures Using An Integrated Algorithmic Modelling FrameworkDocument5 pagesModeling and Analysis of Anisogrid Lattice Structures Using An Integrated Algorithmic Modelling FrameworkJay SrivastavaNo ratings yet
- 1 s2.0 S0013794421002459 MainDocument16 pages1 s2.0 S0013794421002459 MainvinhtungbkNo ratings yet
- Comparison of Ballistic Impact Behavior of Carbon Fiber/Epoxy Composite and Steel Metal StructuresDocument10 pagesComparison of Ballistic Impact Behavior of Carbon Fiber/Epoxy Composite and Steel Metal StructuresVeeturiVarunNo ratings yet
- Multi-Scale Analysis of The Flexural Behaviour of 3D Printed Cellular Polymer MUY BUENODocument10 pagesMulti-Scale Analysis of The Flexural Behaviour of 3D Printed Cellular Polymer MUY BUENOPau BarocioNo ratings yet
- Finite Element Simulation of The Axial Collapse of Thin-Wall Square FrustaDocument11 pagesFinite Element Simulation of The Axial Collapse of Thin-Wall Square Frustameenatchi sundaramNo ratings yet
- 1 s2.0 S0263823122010709 MainDocument16 pages1 s2.0 S0263823122010709 MainSerban IacobNo ratings yet
- Composites Science and Technology: T.J. Vaughan, C.T. MccarthyDocument7 pagesComposites Science and Technology: T.J. Vaughan, C.T. MccarthySmeriuNo ratings yet
- BAT Algorithm-Based ANN To Predict The Compressive Strength of Concrete - A Comparative StudyDocument18 pagesBAT Algorithm-Based ANN To Predict The Compressive Strength of Concrete - A Comparative StudyGogyNo ratings yet
- 1-s2.0-S1026309812000302-mainDocument7 pages1-s2.0-S1026309812000302-mainSiva GuruNo ratings yet
- Non-Linear 3D Finite Element Analysis of Precast Reinforced Concrete Beam-Column Joint Under Monotonic Static Load - 2022Document12 pagesNon-Linear 3D Finite Element Analysis of Precast Reinforced Concrete Beam-Column Joint Under Monotonic Static Load - 2022JuanNo ratings yet
- A Membrane Equivalent Method To Reproduce The Macroscopic Mechanical Responses of Steel Wire-Ring Nets Under Rockfall ImpactDocument16 pagesA Membrane Equivalent Method To Reproduce The Macroscopic Mechanical Responses of Steel Wire-Ring Nets Under Rockfall ImpactaxelNo ratings yet
- Ultimate Behavior of Composite Castellated Beams Under Vertical LoadsDocument7 pagesUltimate Behavior of Composite Castellated Beams Under Vertical LoadsZainab SattarNo ratings yet
- Composite Structures: Broderick H. Coburn, Zhangming Wu, Paul M. WeaverDocument12 pagesComposite Structures: Broderick H. Coburn, Zhangming Wu, Paul M. Weaveriname11No ratings yet
- J 3 - Publicacion - ANN - 7. SEM92629PDocument8 pagesJ 3 - Publicacion - ANN - 7. SEM92629PPICON RODRIGUEZ RICARDO ANTONIONo ratings yet
- Materials Science and Engineering: Doctoral SchoolDocument4 pagesMaterials Science and Engineering: Doctoral SchoolNestor UlloaNo ratings yet
- 1 s2.0 S127096382200757X MainDocument13 pages1 s2.0 S127096382200757X MainTejasvi PrakashNo ratings yet
- Computational Simulation and Optimization of Functionally Graded Auxetic Structures Made From Inverted TetrapodsDocument7 pagesComputational Simulation and Optimization of Functionally Graded Auxetic Structures Made From Inverted TetrapodsRodrigoNo ratings yet
- A High Order Theory For The Analysis ofDocument14 pagesA High Order Theory For The Analysis ofgrygoriiNo ratings yet
- Predicting SCC Performance Using ANN98-m43Document8 pagesPredicting SCC Performance Using ANN98-m43Ilhame HarNo ratings yet
- A layered cylindrical quadrilateral shell element for nonlinear analysis of RC plate structures_Zhang-Bradford-GilbertDocument13 pagesA layered cylindrical quadrilateral shell element for nonlinear analysis of RC plate structures_Zhang-Bradford-GilbertCotee_nunezgNo ratings yet
- Finite Element Analysis of Beam-To-Column Joints IDocument15 pagesFinite Element Analysis of Beam-To-Column Joints IJhonatan Romero CastilloNo ratings yet
- Impact 2Document15 pagesImpact 2Shoaib MalikNo ratings yet
- Composite Structures: B.B. Yin, K.M. LiewDocument12 pagesComposite Structures: B.B. Yin, K.M. LiewSanket LotheNo ratings yet
- 1 s2.0 S0167844218302234 MainDocument8 pages1 s2.0 S0167844218302234 MainSudeep SAHOONo ratings yet
- A Comparative Seismic Fragility Analysis of A Multi and Single Component Beam Column Joint ModelsDocument19 pagesA Comparative Seismic Fragility Analysis of A Multi and Single Component Beam Column Joint Modelsprraaddeej chatelNo ratings yet
- Effect of Material Used For Infill Wall and Its Shape On The Seismic Performance of RC FrameDocument11 pagesEffect of Material Used For Infill Wall and Its Shape On The Seismic Performance of RC FrameIJRASETPublicationsNo ratings yet
- 1 s2.0 S1000936120303745 MainDocument13 pages1 s2.0 S1000936120303745 MainAngriot NeanNo ratings yet
- Artikel UAS TSDocument10 pagesArtikel UAS TSPipit Tria ZulianiNo ratings yet
- Finite Element Analysis of Brick MasonryDocument10 pagesFinite Element Analysis of Brick MasonryKarishma NazimiNo ratings yet
- Experimental and Numerical Study of The Flexural Behaviour of Ultra-HighDocument14 pagesExperimental and Numerical Study of The Flexural Behaviour of Ultra-HighjayanthNo ratings yet
- 2013 Zhan Meschke FraMCoS8 2013Document9 pages2013 Zhan Meschke FraMCoS8 2013Sofiene helailiNo ratings yet
- Predicting Kerf Quality Characterstv 1 (3)Document14 pagesPredicting Kerf Quality Characterstv 1 (3)raisa1No ratings yet
- 1-s2.0-S2214860419305184-main (1) (002)Document9 pages1-s2.0-S2214860419305184-main (1) (002)Abdullah Al Bari TusharNo ratings yet
- J Matpr 2020 11 449Document7 pagesJ Matpr 2020 11 449Sankeeth SivaananthanNo ratings yet
- Extended Finite Element Method: Tsinghua University Press Computational Mechanics SeriesFrom EverandExtended Finite Element Method: Tsinghua University Press Computational Mechanics SeriesNo ratings yet
- Optimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsFrom EverandOptimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsNo ratings yet
- A Review of Origami Applications in Mechanical Engineering: Nicholas Turner, Bill Goodwine and Mihir SenDocument18 pagesA Review of Origami Applications in Mechanical Engineering: Nicholas Turner, Bill Goodwine and Mihir SenAna Sofia MirandaNo ratings yet
- Encuadernacion de ProyectosDocument6 pagesEncuadernacion de ProyectosHermogensNo ratings yet
- E Glass WovenDocument2 pagesE Glass WovenAdnan AhmedNo ratings yet
- An Innovative Deployable Solar Panel System For CubesatsDocument8 pagesAn Innovative Deployable Solar Panel System For CubesatsSuraj_73No ratings yet
- Kapuria - An Efficient Zigzag Theory Based Finite Element Modeling of Composite and Sandwich Plates With Multiple Delaminations Using A Hybrid Continuity Method - 2019Document22 pagesKapuria - An Efficient Zigzag Theory Based Finite Element Modeling of Composite and Sandwich Plates With Multiple Delaminations Using A Hybrid Continuity Method - 2019Adnan AhmedNo ratings yet
- Linking Abaqus 2022 Intelone APIFortran Compiler Visual Studioin Windows 10Document14 pagesLinking Abaqus 2022 Intelone APIFortran Compiler Visual Studioin Windows 10Adnan AhmedNo ratings yet
- Ahmed - A Four-Node Facet Shell Element For Laminated Shells Based On The Third Order Zigzag Theory - 2016 PDFDocument16 pagesAhmed - A Four-Node Facet Shell Element For Laminated Shells Based On The Third Order Zigzag Theory - 2016 PDFAdnan AhmedNo ratings yet
- Adnan Ahmed: Research InterestsDocument5 pagesAdnan Ahmed: Research InterestsAdnan AhmedNo ratings yet
- AML-771 Evaluation Upto Quiz 2Document8 pagesAML-771 Evaluation Upto Quiz 2Adnan AhmedNo ratings yet
- A Stabilized Piezolaminated Nine Nodded Shell Element Formulation For Analyzing Smart Structures BehaviorsDocument9 pagesA Stabilized Piezolaminated Nine Nodded Shell Element Formulation For Analyzing Smart Structures BehaviorsAdnan AhmedNo ratings yet
- Ahmed - An Efficient Facet Shell Element With Layerwise Mechanics For Coupled - 2020Document14 pagesAhmed - An Efficient Facet Shell Element With Layerwise Mechanics For Coupled - 2020Adnan AhmedNo ratings yet
- Composite Structures: Adnan Ahmed, Santosh KapuriaDocument12 pagesComposite Structures: Adnan Ahmed, Santosh KapuriaAdnan AhmedNo ratings yet
- Kapuria - Delamination Modeling in Doubly Curved Laminated Shellset - 2019Document23 pagesKapuria - Delamination Modeling in Doubly Curved Laminated Shellset - 2019Adnan AhmedNo ratings yet
- AIAA Journal Volume 33 Issue 10 1995 (Doi 10.2514/3.12745) Hu, Jian S. Hwu, Chyanbin - Free Vibration of Delaminated Composite Sandwich BeamsDocument9 pagesAIAA Journal Volume 33 Issue 10 1995 (Doi 10.2514/3.12745) Hu, Jian S. Hwu, Chyanbin - Free Vibration of Delaminated Composite Sandwich BeamsAdnan AhmedNo ratings yet
- Wobbes Et Al-2019-International Journal For Numerical Methods in EngineeringDocument20 pagesWobbes Et Al-2019-International Journal For Numerical Methods in EngineeringAdnan AhmedNo ratings yet
- Pda Iit DelhiDocument2 pagesPda Iit DelhiAdnan AhmedNo ratings yet
- Thin-Walled Structures: Adnan Ahmed, Santosh KapuriaDocument14 pagesThin-Walled Structures: Adnan Ahmed, Santosh KapuriaAdnan AhmedNo ratings yet
- Finite Element Method Practice Sheet-10Document1 pageFinite Element Method Practice Sheet-10Adnan AhmedNo ratings yet
- Incam2019 AdnanDocument2 pagesIncam2019 AdnanAdnan AhmedNo ratings yet
- Nonlinear Aeroelastic Analysis of Composite Wings Using Finite Element MethodDocument9 pagesNonlinear Aeroelastic Analysis of Composite Wings Using Finite Element MethodAdnan AhmedNo ratings yet
- Oktem Levy Type Fourier 2007Document14 pagesOktem Levy Type Fourier 2007Adnan AhmedNo ratings yet
- Blast ValvesDocument1 pageBlast ValvesAdnan AhmedNo ratings yet
- Meshless Method A Review and Computer ImplementationDocument51 pagesMeshless Method A Review and Computer ImplementationAdnan AhmedNo ratings yet
- 1Document10 pages1Adnan AhmedNo ratings yet
- Department of Applied MechanicsDocument1 pageDepartment of Applied MechanicsAdnan AhmedNo ratings yet
- Packaging Materials and Handling Technique: Dr. Ranjeet SinghDocument48 pagesPackaging Materials and Handling Technique: Dr. Ranjeet Singharon demagiba100% (1)
- Foundation of EducationDocument31 pagesFoundation of EducationM T Ząřřąř100% (1)
- Types of swords from around the worldDocument4 pagesTypes of swords from around the worldДмитрий МихальчукNo ratings yet
- Quarter 1-Module 2 Modern ArtDocument20 pagesQuarter 1-Module 2 Modern ArtKimberly Trocio Kim100% (1)
- Example of Gcse Science CourseworkDocument7 pagesExample of Gcse Science Courseworkbcrbcw6a100% (2)
- KND 3200 eDocument0 pagesKND 3200 eGianna FrolaNo ratings yet
- Systems Design: Job-Order Costing and Process Costing: MANAGEMENT ACCOUNTING - Solutions ManualDocument16 pagesSystems Design: Job-Order Costing and Process Costing: MANAGEMENT ACCOUNTING - Solutions ManualBianca LizardoNo ratings yet
- Hyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFDocument20 pagesHyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFVicente Antonio GonzalezNo ratings yet
- Reading Test 7 - PassageDocument12 pagesReading Test 7 - PassageĐinh Quốc LiêmNo ratings yet
- Akbh PSK (V), TRBH As Y: AdhimokṣADocument8 pagesAkbh PSK (V), TRBH As Y: AdhimokṣA张晓亮No ratings yet
- Iodine Summaryupdate 2016Document26 pagesIodine Summaryupdate 2016FrankNo ratings yet
- Porsche Boxster Versus Factory Five 818Document8 pagesPorsche Boxster Versus Factory Five 818SteveNo ratings yet
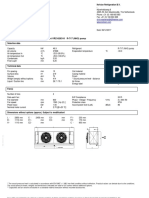
- GSL DIP Phase - 1 Cooler 45kWDocument1 pageGSL DIP Phase - 1 Cooler 45kWMuhasin PallikkalNo ratings yet
- GREEN AIR CONDITIONER Mechanical Presentation TopicsDocument9 pagesGREEN AIR CONDITIONER Mechanical Presentation TopicsCerin91No ratings yet
- MIND - BODY RelationshipDocument18 pagesMIND - BODY RelationshipvishwabhashaNo ratings yet
- Rainas, Lamjung: Office of Rainas MunicipalityDocument5 pagesRainas, Lamjung: Office of Rainas MunicipalityLakshman KhanalNo ratings yet
- 22 Imobilisasi Pada Usia LanjutDocument34 pages22 Imobilisasi Pada Usia LanjutGian KalalembangNo ratings yet
- Aam April 2023Document198 pagesAam April 2023Adhitya DewantaraNo ratings yet
- 07 - Structural Organisation in AnimalsDocument31 pages07 - Structural Organisation in AnimalsKamala Kannan XANo ratings yet
- November 2010 (v1) QP - Paper 3 CIE Biology A-Level PDFDocument12 pagesNovember 2010 (v1) QP - Paper 3 CIE Biology A-Level PDFWiji NingNo ratings yet
- Science: Pure Substances Vs MixturesDocument33 pagesScience: Pure Substances Vs MixturesElle Ma Rie100% (1)
- Cefiget-Range-Leaflet-PakistanDocument2 pagesCefiget-Range-Leaflet-PakistanZafran KhanNo ratings yet
- Friends of Hursley School: Late Summer NewsletterDocument6 pagesFriends of Hursley School: Late Summer Newsletterapi-25947758No ratings yet
- Captured Ammunition Bulletin No 1Document34 pagesCaptured Ammunition Bulletin No 1roberto porto100% (1)
- Fetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaDocument150 pagesFetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaKripa SusanNo ratings yet
- Stabil Drill Roller ReamersDocument2 pagesStabil Drill Roller ReamersIMEDHAMMOUDANo ratings yet
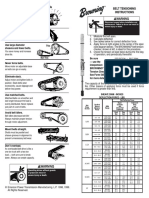
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet