You might also like
- Marple AnalyticDocument4 pagesMarple AnalyticsssskkkkllllNo ratings yet
- Army - stp21 24 - Soldier's Manual of Common Tasks - Warrior Skills Level 2, 3, and 4Document328 pagesArmy - stp21 24 - Soldier's Manual of Common Tasks - Warrior Skills Level 2, 3, and 4Meowmix100% (15)
- Indonesia Salary Guide Ebook PDFDocument22 pagesIndonesia Salary Guide Ebook PDFteguh_setiono100% (2)
- DKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesDocument23 pagesDKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesmwangiNo ratings yet
- DSP Lab 4 AssignmentDocument2 pagesDSP Lab 4 AssignmentFarhang NaderiNo ratings yet
- Bishnu Hazra - Ece - Ec504-5thDocument15 pagesBishnu Hazra - Ece - Ec504-5thDevNo ratings yet
- EIE3510Assignment 3 - FinalDocument2 pagesEIE3510Assignment 3 - FinalYabin CHENGNo ratings yet
- Finite Impulse Response (FIR) Filter DesignDocument74 pagesFinite Impulse Response (FIR) Filter DesignItkalkarShaileshNo ratings yet
- DSP PDFDocument0 pagesDSP PDFvelkarthi92No ratings yet
- DSP TutorialDocument3 pagesDSP TutorialFathima RashmiNo ratings yet
- Defect Detection Based On Two Different Algorithms of Analysis and ComparisonDocument8 pagesDefect Detection Based On Two Different Algorithms of Analysis and ComparisonAditya ChouguleNo ratings yet
- Design of Digital FiltersDocument26 pagesDesign of Digital FiltersLatha VenkateshNo ratings yet
- EC3601 (1) - MergedDocument5 pagesEC3601 (1) - MergedRobin KumarNo ratings yet
- Iir & FirDocument198 pagesIir & FirPanshu kumarNo ratings yet
- Orthogonal Wavelets Via Filter BanksDocument22 pagesOrthogonal Wavelets Via Filter Banksgabiscar01No ratings yet
- Chapter-4-Discrete Time Signal in Transform DomainDocument26 pagesChapter-4-Discrete Time Signal in Transform DomainIqra ImtiazNo ratings yet
- Question Bank DSP EEC-602Document3 pagesQuestion Bank DSP EEC-602Sougata GhoshNo ratings yet
- LAB 7: IIR Filter Design ObjectivesDocument13 pagesLAB 7: IIR Filter Design Objectivesmjrahimi.eee2020No ratings yet
- Fourier PropertiesDocument14 pagesFourier PropertiesmfchinNo ratings yet
- Digital FiltersDocument50 pagesDigital FiltersJoseNo ratings yet
- Lec20 2023Document18 pagesLec20 2023Zaineb FarooqNo ratings yet
- Design of FIR Filters: Z N H Z H e e e e ZDocument11 pagesDesign of FIR Filters: Z N H Z H e e e e Zapi-19804922No ratings yet
- CH - 4 Discrete Fourier TransformDocument64 pagesCH - 4 Discrete Fourier TransformBinyam Habtamu100% (1)
- DSP Lab 2 Student SU20Document7 pagesDSP Lab 2 Student SU20Md Sadi Al HudaNo ratings yet
- Slides6 Updated1Document28 pagesSlides6 Updated1saqibmaxNo ratings yet
- Digital Assignment 3Document5 pagesDigital Assignment 3PallaviNo ratings yet
- Digital Filter Design (FIR) Using Frequency Sampling Method: AbstractDocument10 pagesDigital Filter Design (FIR) Using Frequency Sampling Method: AbstractRaviKiranNo ratings yet
- The Discrete-Time Fourier Transform: 44 MinutesDocument9 pagesThe Discrete-Time Fourier Transform: 44 Minutesapi-127299018No ratings yet
- National Institute of Technology RourkelaDocument2 pagesNational Institute of Technology Rourkelapradhansibasankar10No ratings yet
- Spectral Wave AnalysisDocument13 pagesSpectral Wave AnalysisASHOKKUMAR ENo ratings yet
- Statistics SpectrumDocument45 pagesStatistics SpectrumjackiemaddyNo ratings yet
- IIR Digital Filter Design For Powerline Noise CancDocument10 pagesIIR Digital Filter Design For Powerline Noise Cancsnri0da9No ratings yet
- Beng (Hons) Telecommunications: Cohort: Btel/10B/Ft & Btel/09/FtDocument9 pagesBeng (Hons) Telecommunications: Cohort: Btel/10B/Ft & Btel/09/FtMarcelo BaptistaNo ratings yet
- FiltersDocument34 pagesFiltersPrashant ChaharNo ratings yet
- IIRDocument103 pagesIIRDivya StudyNo ratings yet
- Objectives:: Bode Plots and FiltersDocument11 pagesObjectives:: Bode Plots and Filterscantik cuteNo ratings yet
- Objectives:: Bode Plots and FiltersDocument11 pagesObjectives:: Bode Plots and Filterscantik cuteNo ratings yet
- ECE III II DSP ContentDocument40 pagesECE III II DSP ContentAvigyan BasuNo ratings yet
- Chapter - 3 - Transmission Signal & Noise in SystemDocument13 pagesChapter - 3 - Transmission Signal & Noise in Systemعظات روحيةNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document3 pagesQuestion Paper Code:: (10×2 20 Marks)ManimegalaiNo ratings yet
- DSP Two Marks - Unit I-IVDocument27 pagesDSP Two Marks - Unit I-IVDhariniNo ratings yet
- E R A R H: Design of Finite-Duration Impulse Response (FIR) Digital FilterDocument14 pagesE R A R H: Design of Finite-Duration Impulse Response (FIR) Digital FilterRajasekhar AtlaNo ratings yet
- Linear Shift-Invariant Systems1Document15 pagesLinear Shift-Invariant Systems1Mariem Ben HabibNo ratings yet
- Notes On Micro Controller and Digital Signal ProcessingDocument70 pagesNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNo ratings yet
- Term Paper XIX EED-323Document1 pageTerm Paper XIX EED-323Kanav MahajanNo ratings yet
- Rajastan College of Engineering For Women: Digital Signal ProcessingDocument7 pagesRajastan College of Engineering For Women: Digital Signal Processingchandra1985No ratings yet
- Ece4710 L5Document19 pagesEce4710 L5shafira zeindaNo ratings yet
- 9.lecture LabDocument12 pages9.lecture LabMekonen AberaNo ratings yet
- Time and Frequency Analysis of Discrete-Time SignalsDocument15 pagesTime and Frequency Analysis of Discrete-Time SignalsVinay Krishna VadlamudiNo ratings yet
- Ch02 - Signal Transmission and FilteringDocument18 pagesCh02 - Signal Transmission and FilteringBkm Mizanur RahmanNo ratings yet
- Image Degradation and Restoration ModelDocument8 pagesImage Degradation and Restoration Modelpi194043100% (2)
- Angle / Exponential Modulation: Lecture-4 FM Demodulation Using PLLDocument4 pagesAngle / Exponential Modulation: Lecture-4 FM Demodulation Using PLLGopi Chand ChowdaryNo ratings yet
- Shirdi Sai Engg CollegeDocument12 pagesShirdi Sai Engg CollegeSGSNo ratings yet
- NGCT 2017 Paper 598Document15 pagesNGCT 2017 Paper 598sirisha vNo ratings yet
- Lin PhaseDocument24 pagesLin Phasefarouq_razzaz2574No ratings yet
- Time-Frequency Analysis of Seismic Data Using Local AttributesDocument24 pagesTime-Frequency Analysis of Seismic Data Using Local AttributesAmitNo ratings yet
- Fourier AnalysisDocument37 pagesFourier Analysisfarouq_razzaz2574No ratings yet
- 3 Fourier Series Representation of Periodic SignalsDocument31 pages3 Fourier Series Representation of Periodic SignalspatelIbrahimNo ratings yet
- Assignment Question 1 ADSPDocument1 pageAssignment Question 1 ADSPKumar ManiNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- 2.2 - Isakkson - Biomass Gasification For Lime Kiln ApplicationsDocument15 pages2.2 - Isakkson - Biomass Gasification For Lime Kiln ApplicationsHuy NguyenNo ratings yet
- Project Assignment 2 BMG20103 AMG20103 BMG10103 BMG20303 AMG20303Document3 pagesProject Assignment 2 BMG20103 AMG20103 BMG10103 BMG20303 AMG20303Taufik DanielNo ratings yet
- MCCB & Acb: Merlin GerinDocument42 pagesMCCB & Acb: Merlin GerinWijayasekara BuddhikaNo ratings yet
- S1.03 - Structural Symbols and NotationsDocument1 pageS1.03 - Structural Symbols and NotationsMarie Ariadne MurilloNo ratings yet
- Cyber Law ProjectDocument18 pagesCyber Law ProjectJyotsna Aggarwal0% (1)
- Case Digest - Eminent DomainDocument3 pagesCase Digest - Eminent DomainBlaire QuindaoNo ratings yet
- GPS TrackerDocument4 pagesGPS TrackerRanjit JahakarNo ratings yet
- CW421J 631J 821J 860NJ 862NJ 896J 960J Inst. Manual R4Document1 pageCW421J 631J 821J 860NJ 862NJ 896J 960J Inst. Manual R4Gopar Nsw ClcpNo ratings yet
- Application For Property Tax Abatement Exemption: Texas Comptroller of Public AccountsDocument3 pagesApplication For Property Tax Abatement Exemption: Texas Comptroller of Public AccountsNnamdi AzikeNo ratings yet
- CNH New HollandDocument268 pagesCNH New Hollandmanuchauhan0% (1)
- International Training: Arpana F. Gawade Dhanashri SDocument8 pagesInternational Training: Arpana F. Gawade Dhanashri SAny KadamNo ratings yet
- Predicting Box Compression Strength - 3 PDFDocument37 pagesPredicting Box Compression Strength - 3 PDFTajuddin ShaikNo ratings yet
- Financial Literacy SyllabusDocument2 pagesFinancial Literacy SyllabusGRRLYSLOTH100% (1)
- Wikispecies, Free Species DirectoryDocument5 pagesWikispecies, Free Species DirectoryjpescuderoNo ratings yet
- Fua Cun vs. SummersDocument1 pageFua Cun vs. SummersElreen Pearl AgustinNo ratings yet
- Peter Wilkinson CV 1Document3 pagesPeter Wilkinson CV 1larry3108No ratings yet
- Social Ent The Concept PDFDocument29 pagesSocial Ent The Concept PDFSteffi SunurNo ratings yet
- Long Term Gas Supply ContractsDocument6 pagesLong Term Gas Supply ContractslupoderiNo ratings yet
- Project 3 The Results of Your ResearchDocument2 pagesProject 3 The Results of Your ResearchLiam ElsenNo ratings yet
- EPM Manual DensityPRODocument196 pagesEPM Manual DensityPRODiego ReyesNo ratings yet
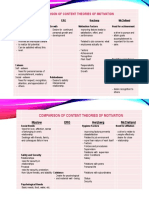
- Comparison of Content THeoriesDocument2 pagesComparison of Content THeoriesMelNo ratings yet
- Yao Vs Perello No 9Document2 pagesYao Vs Perello No 9Ella QuiNo ratings yet
- Parts Catalog: 0CF10-M50502ENDocument128 pagesParts Catalog: 0CF10-M50502ENalexNo ratings yet
- Bhushan Thakre Cse - Nit Raipur: ExperienceDocument1 pageBhushan Thakre Cse - Nit Raipur: Experiencekeshtya.keshNo ratings yet
- Research Paper On Milling MachineDocument6 pagesResearch Paper On Milling Machineafnhemzabfueaa100% (1)
- BDI CDI Analysis - Budget Allocation (Weighted Sum Method) - Department of MarketingDocument6 pagesBDI CDI Analysis - Budget Allocation (Weighted Sum Method) - Department of MarketingSarthak MohantyNo ratings yet
- Steel Sector Motilal OswalDocument30 pagesSteel Sector Motilal OswalBinod Kumar PadhiNo ratings yet
- 123Document2 pages123Dilan WarnakulasooriyaNo ratings yet