You might also like
- Fast and Effective Embedded Systems Design: Applying the ARM mbedFrom EverandFast and Effective Embedded Systems Design: Applying the ARM mbedRating: 5 out of 5 stars5/5 (2)
- Software-Defined Cloud Centers: Operational and Management Technologies and ToolsFrom EverandSoftware-Defined Cloud Centers: Operational and Management Technologies and ToolsNo ratings yet
- HCMUT Internship Report DoanTienThongDocument21 pagesHCMUT Internship Report DoanTienThongThông Đoàn TiếnNo ratings yet
- Dahikalambe DiDocument11 pagesDahikalambe DiAditya GhuleNo ratings yet
- Murari SinghDocument37 pagesMurari SinghMurari Singh RajputNo ratings yet
- Siwes ReportDocument14 pagesSiwes ReportADIGUN GodwinNo ratings yet
- B.Tech Project on Campus Network SecurityDocument66 pagesB.Tech Project on Campus Network SecurityArishveer KaurNo ratings yet
- 8051 Microcontroller Train PrototypeDocument67 pages8051 Microcontroller Train Prototypegopi kishanNo ratings yet
- Internship Report RaqibfinalDocument65 pagesInternship Report RaqibfinalNikhil HiremathNo ratings yet
- Embedded Design Training ReportDocument52 pagesEmbedded Design Training ReportAshish YadavNo ratings yet
- AbcdDocument26 pagesAbcdAditya GhuleNo ratings yet
- ICDL Computer Essentials 1.0 Win 10 - GS MUSANZE IDocument98 pagesICDL Computer Essentials 1.0 Win 10 - GS MUSANZE IIduhoze JeanpaulNo ratings yet
- Metro Train Prototype USING 8051: Submitted By: Gagan Gangwar Harjeet Singh Om Prakash Singh Shoeb DanishDocument36 pagesMetro Train Prototype USING 8051: Submitted By: Gagan Gangwar Harjeet Singh Om Prakash Singh Shoeb DanishOm Prakash Singh0% (1)
- Foundation Course HandbookDocument358 pagesFoundation Course HandbookA28 khilare RamNo ratings yet
- Practical Troubleshooting and Problem Solving of Ethernet NetworksDocument28 pagesPractical Troubleshooting and Problem Solving of Ethernet NetworksMonish KrishnaNo ratings yet
- Cdac Project Nikhil Singh Modified PDFDocument95 pagesCdac Project Nikhil Singh Modified PDFAvinash SiwachNo ratings yet
- MSBTE In-plant Training Report on Emerging TechnologiesDocument45 pagesMSBTE In-plant Training Report on Emerging TechnologiesYuva Neta Ashish PandeyNo ratings yet
- Training Report on PIC MicrocontrollerDocument34 pagesTraining Report on PIC MicrocontrollerAkash GaurNo ratings yet
- Smart Wheel Chair For Visually Impaired PersonDocument32 pagesSmart Wheel Chair For Visually Impaired Personrohit a bhosaleNo ratings yet
- Idc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)Document59 pagesIdc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)neno2405No ratings yet
- Company's Infrastructure FULL DONEDocument34 pagesCompany's Infrastructure FULL DONENISHKARSH. MAURYANo ratings yet
- Kapil Trining ReportDocument31 pagesKapil Trining Reportjai417No ratings yet
- Embedded System & Robotics With "C ": Project Training inDocument53 pagesEmbedded System & Robotics With "C ": Project Training inpuneet_rajputNo ratings yet
- Project ReportDocument26 pagesProject ReportMohanad HaddadNo ratings yet
- IV Ansar OrgDocument50 pagesIV Ansar OrgAbhin AsNo ratings yet
- MSP430 TutorialDocument113 pagesMSP430 TutorialOcean AtlanticNo ratings yet
- Local Area Network PlanDocument165 pagesLocal Area Network PlanJaspreetSinghNo ratings yet
- 009 Training Manual Application of ICT in ConstructionDocument21 pages009 Training Manual Application of ICT in ConstructionabdelhaouariNo ratings yet
- A Project Report On "Event Management"Document59 pagesA Project Report On "Event Management"Purna GuptaNo ratings yet
- Introduction to SIWES and KAEDCODocument13 pagesIntroduction to SIWES and KAEDCOSamuel Geoffry100% (1)
- Instrumentation Pocket GuideDocument59 pagesInstrumentation Pocket Guideerwin.hindartoNo ratings yet
- Arba Minch University: Institute of TechnologyDocument28 pagesArba Minch University: Institute of TechnologyAbdi Iman100% (2)
- Bisola OJT-Final-Report-1numberedDocument23 pagesBisola OJT-Final-Report-1numberedBisola OlawuwoNo ratings yet
- Aishwarya Internship ReportDocument34 pagesAishwarya Internship ReportTarun VarkalaNo ratings yet
- Cloning of A Computer SystemDocument30 pagesCloning of A Computer SystemJulius PopoolaNo ratings yet
- Visual Basic ProgrammingDocument87 pagesVisual Basic ProgrammingRohit Nair0% (1)
- 8051 Microcontroller and Embedded Systems: A Six Week Training and Project Report OnDocument35 pages8051 Microcontroller and Embedded Systems: A Six Week Training and Project Report OnsnehaNo ratings yet
- Sit ReportDocument23 pagesSit Reportbjimmy19No ratings yet
- Hostel Management System Project ReportDocument31 pagesHostel Management System Project ReportRohit50% (12)
- Hardware and Networking: Career OptionsDocument20 pagesHardware and Networking: Career OptionssarathsagarkishorkumNo ratings yet
- Jimma University Intern Gains Website Design SkillsDocument17 pagesJimma University Intern Gains Website Design SkillsNhja hjhfjds0% (1)
- Hall Booking ReportDocument83 pagesHall Booking ReportbalwantNo ratings yet
- Arduino Seminar ReportDocument32 pagesArduino Seminar ReportArvind Gupta67% (3)
- Tecnical ReportDocument16 pagesTecnical Reportnabbas011100% (1)
- Industrial Training Report PratikDocument43 pagesIndustrial Training Report PratikNullNo ratings yet
- Prefinal ReportppppppppppDocument27 pagesPrefinal ReportppppppppppGowtham JackNo ratings yet
- IOM IDX 3 - 4 Course Syllabus - 20181226Document8 pagesIOM IDX 3 - 4 Course Syllabus - 20181226dmorenocNo ratings yet
- Internship Objectives: Design and Development of Embedded System and Iot 2021-22Document57 pagesInternship Objectives: Design and Development of Embedded System and Iot 2021-22Prince PraveenNo ratings yet
- 5.apoorva Project Report FinalDocument57 pages5.apoorva Project Report FinalAPOORVA RAMPALNo ratings yet
- Embedded SystemsDocument54 pagesEmbedded SystemsAnkur Kumar100% (1)
- Design and Implementation of A Microcontroller Development Kit For STEM EducationDocument11 pagesDesign and Implementation of A Microcontroller Development Kit For STEM EducationSolomon AkpanNo ratings yet
- Duoc UC Network Engineering Professional Practice ReportDocument13 pagesDuoc UC Network Engineering Professional Practice ReportScribdTranslationsNo ratings yet
- Starz University College of Science and Technology: Net 207 ProjectDocument9 pagesStarz University College of Science and Technology: Net 207 ProjectWidimongar W. JarqueNo ratings yet
- 01-SX Prelims r2.2.MhtDocument7 pages01-SX Prelims r2.2.MhtAhmedNo ratings yet
- 01-SX Prelims r2.2.MhtDocument7 pages01-SX Prelims r2.2.MhtAhmedNo ratings yet
- Narula Institute of Technology: TitleDocument55 pagesNarula Institute of Technology: TitleBasant Kumar PanditNo ratings yet
- Latest ReportDocument44 pagesLatest ReportKRISHNo ratings yet
- Thesis Topics Embedded SystemsDocument8 pagesThesis Topics Embedded Systemsglennabeitelspachersiouxfalls100% (2)
- Internship Report-Gas Leakage DetectorDocument23 pagesInternship Report-Gas Leakage DetectorAkshaya DCNo ratings yet
- Computer Engineering Orientation ModuleDocument15 pagesComputer Engineering Orientation ModuleJoel Manacmul100% (1)
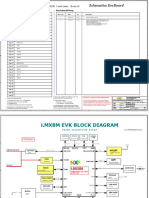
- i.MX8M EVK SchematicsDocument23 pagesi.MX8M EVK SchematicshdsetanhdsetaNo ratings yet
- Assignment 1.3 CHAPTER 1Document4 pagesAssignment 1.3 CHAPTER 1Scholar MacayNo ratings yet
- Oracle SPARC M5-32 Server FAQDocument6 pagesOracle SPARC M5-32 Server FAQKaps BlazeNo ratings yet
- MultivibratorDocument4 pagesMultivibratorsakibNo ratings yet
- Integrated CircuitDocument21 pagesIntegrated CircuitahmedNo ratings yet
- Remote Proctored Exam FAQsDocument3 pagesRemote Proctored Exam FAQsrani jeyarajNo ratings yet
- Data Sheet of EX9134C-2MTCP EX9486CWMTCP (500M) (20200213) FinalDocument2 pagesData Sheet of EX9134C-2MTCP EX9486CWMTCP (500M) (20200213) FinalMas Ahmad Safwan MasbahNo ratings yet
- Control Unit in Microprogrammed ComputersDocument11 pagesControl Unit in Microprogrammed ComputersUnisa SakhaNo ratings yet
- E12.1 The Emitter Current Is Given by The Shockley EquationDocument19 pagesE12.1 The Emitter Current Is Given by The Shockley EquationBengt HörbergNo ratings yet
- Emi Plan Board ddr2 PDFDocument74 pagesEmi Plan Board ddr2 PDFvecnaNo ratings yet
- Chapter 1 - IntroductionDocument34 pagesChapter 1 - IntroductionSohaib ChoudharyNo ratings yet
- 12A 180KHz 40V Buck Converter DatasheetDocument10 pages12A 180KHz 40V Buck Converter Datasheetyb3hgf2222No ratings yet
- ATmega8 As Arduino Using Internal 8Mhz CrystalDocument8 pagesATmega8 As Arduino Using Internal 8Mhz Crystalvictor AjahNo ratings yet
- The Linux System: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument63 pagesThe Linux System: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionTahreem AwaisNo ratings yet
- Bharati Vidyapeeeth's College of Engineering For Wowmen, PuneDocument11 pagesBharati Vidyapeeeth's College of Engineering For Wowmen, PuneGuddi ShelarNo ratings yet
- Fbt0015 Structured Algorithm & Programming Sem Jan 2020 Lab Exercise Week 3 (LAB 2) Assessment#1Document14 pagesFbt0015 Structured Algorithm & Programming Sem Jan 2020 Lab Exercise Week 3 (LAB 2) Assessment#1黄微微No ratings yet
- CODESYS User Service en PDFDocument16 pagesCODESYS User Service en PDFAlexander Castro MendozaNo ratings yet
- XCP Alarm Map GuideDocument12 pagesXCP Alarm Map GuideandresNo ratings yet
- 3.update Retake Conduct Teachers List 24.07.20Document1 page3.update Retake Conduct Teachers List 24.07.20Kingshuk DharNo ratings yet
- Lancnc-Maz: Supplemental Manual For TheDocument6 pagesLancnc-Maz: Supplemental Manual For TheGiapNo ratings yet
- TM-251/A/E Mods: Wide-Banding Modification For The Kenwood TM-251E OnlyDocument2 pagesTM-251/A/E Mods: Wide-Banding Modification For The Kenwood TM-251E OnlyMarco Aurelio PereiraNo ratings yet
- Quick Charge Device List PDFDocument20 pagesQuick Charge Device List PDFAgung SetiawanNo ratings yet
- ZainIraq Modernization Project MOP Rev.2e PDFDocument17 pagesZainIraq Modernization Project MOP Rev.2e PDFMohammed Yaseen100% (1)
- Data Sheet: 1 W BTL Mono Audio AmplifierDocument8 pagesData Sheet: 1 W BTL Mono Audio AmplifierAnonymous nQ4z7PNo ratings yet
- L1 Interview QuestionsDocument4 pagesL1 Interview QuestionsAnil DwivediNo ratings yet
- EE08 Closed Loop Buck Converter.Document4 pagesEE08 Closed Loop Buck Converter.MechWindNaniNo ratings yet
- I3 Tektronix Tbs1000b-Series - DatasheetDocument12 pagesI3 Tektronix Tbs1000b-Series - DatasheetManuel RochaNo ratings yet
- Flashcatusb: For ProfessionalsDocument35 pagesFlashcatusb: For ProfessionalssamuelRODNo ratings yet
- R7F0C003M2DFB, R7F0C004M2DFB: User's Manual: Hardware 16-Bit Single-Chip MicrocontrollersDocument1,053 pagesR7F0C003M2DFB, R7F0C004M2DFB: User's Manual: Hardware 16-Bit Single-Chip MicrocontrollersPeter CardonaNo ratings yet
- KIA KIA KIA: 1.descriptionDocument5 pagesKIA KIA KIA: 1.descriptionOscarVargasNo ratings yet