You might also like
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesFrom EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesNo ratings yet
- Chapter-1 Introduction To Embedded SystemsDocument4 pagesChapter-1 Introduction To Embedded SystemsShivani NomulaNo ratings yet
- Embedded Systems (All Units)Document250 pagesEmbedded Systems (All Units)ezhiltham0% (2)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Unit 1 EsDocument29 pagesUnit 1 EsSree MathyNo ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- Zynq DocumentationDocument82 pagesZynq Documentationgopi krishna100% (1)
- Lecture Note - Embedded System and MicrocontrollerDocument29 pagesLecture Note - Embedded System and MicrocontrollerIkechukwu OkaforNo ratings yet
- What Are Embedded Systems?Document27 pagesWhat Are Embedded Systems?nicar190No ratings yet
- Embedded System - Word FileDocument5 pagesEmbedded System - Word FileJalpa DesaiNo ratings yet
- Original PDFDocument15 pagesOriginal PDFShweta HabibkarNo ratings yet
- EMBEDDED SYSTEM-unit-1Document119 pagesEMBEDDED SYSTEM-unit-112 EE234 Santhosh kumar sNo ratings yet
- 2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFDocument97 pages2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFShanker PandeyNo ratings yet
- Rush Collision Prevention in Railways Major DocumentDocument77 pagesRush Collision Prevention in Railways Major Document18E3457 MukundiniNo ratings yet
- Embedded Systems Btcse-Oe43: By: Naved Alam Assistant Professor (ECE) SEST, Jamia HamdardDocument42 pagesEmbedded Systems Btcse-Oe43: By: Naved Alam Assistant Professor (ECE) SEST, Jamia Hamdardanon_947471502No ratings yet
- Unit I - EmbeddedDocument10 pagesUnit I - EmbeddedHariprasath SubbaraoNo ratings yet
- Embedded SystemDocument11 pagesEmbedded Systemstallone21No ratings yet
- BATCH-7Document74 pagesBATCH-7kota naikNo ratings yet
- Embedded System: It Has InsufficientDocument21 pagesEmbedded System: It Has InsufficientManish Pushkar100% (1)
- Embedded System - Question Bank (BE-ECE, VII Semester, R2008)Document52 pagesEmbedded System - Question Bank (BE-ECE, VII Semester, R2008)Dr. N.Shanmugasundaram100% (2)
- GSM Based Industrial Control and AutomationDocument80 pagesGSM Based Industrial Control and AutomationMounika ChowdaryNo ratings yet
- B.tech EeeprojectDocument97 pagesB.tech EeeprojectVamsi SakhamuriNo ratings yet
- Embedded SystemDocument150 pagesEmbedded SystemAnup MaharjanNo ratings yet
- Unit - 1 Introduction To Embedded SystemsDocument23 pagesUnit - 1 Introduction To Embedded Systemssrinivasarao vuppanapalliNo ratings yet
- Unit 1Document20 pagesUnit 1prabhavathysund8763No ratings yet
- Minor LastDocument67 pagesMinor LastMusharraf AliNo ratings yet
- Embedded and Real-Time Operating Systems: Course Code: 70439Document76 pagesEmbedded and Real-Time Operating Systems: Course Code: 70439SrikanthNo ratings yet
- Embedded System: From Wikipedia, The Free EncyclopediaDocument12 pagesEmbedded System: From Wikipedia, The Free EncyclopediaAndrei Ursac100% (1)
- Introduction to Embedded SystemsDocument43 pagesIntroduction to Embedded SystemsBasheer T MNo ratings yet
- Embedded System PresentationDocument17 pagesEmbedded System Presentationniravsoni001No ratings yet
- CH 2Document59 pagesCH 2gcrossnNo ratings yet
- BATCH-8Document9 pagesBATCH-8kota naikNo ratings yet
- Microcontroller Wikipedia Article SummaryDocument8 pagesMicrocontroller Wikipedia Article Summarychella_duraiNo ratings yet
- Sri Venkateswara Engineering CollegeDocument12 pagesSri Venkateswara Engineering Collegeapi-19799369No ratings yet
- Question Bank - Embedded SystemsDocument24 pagesQuestion Bank - Embedded Systemschandrasekar100% (2)
- Module 1Document18 pagesModule 1Rohit AnejaNo ratings yet
- Unit 2 - Learning MaterailDocument52 pagesUnit 2 - Learning MaterailPILLARISETTY KARTHIK 2021-CSE UGNo ratings yet
- Project ReportDocument63 pagesProject ReportEliyasuddin AliNo ratings yet
- Chapter 21Document28 pagesChapter 21vishal_16278No ratings yet
- Embedded Systems Guide for DesignersDocument13 pagesEmbedded Systems Guide for DesignersIrshad AnsariNo ratings yet
- Embedded Systems - Question Bank (AU-CBE, ECE-R2007)Document36 pagesEmbedded Systems - Question Bank (AU-CBE, ECE-R2007)Dr. N.ShanmugasundaramNo ratings yet
- Embedded Systems AssignmentsDocument24 pagesEmbedded Systems AssignmentsAbhijit MohapatraNo ratings yet
- Advanced Electronic Protection System To Prevent Exam Paper LeakagesDocument135 pagesAdvanced Electronic Protection System To Prevent Exam Paper LeakagesSyed Viquar AhmedNo ratings yet
- Sms Based Digital Notice BoardDocument107 pagesSms Based Digital Notice BoardSaara KhanNo ratings yet
- Chapter 1: Introduction: 1.1 What Is A Microprocessor?Document69 pagesChapter 1: Introduction: 1.1 What Is A Microprocessor?Niran SafarNo ratings yet
- BATCH-9Document78 pagesBATCH-9kota naikNo ratings yet
- Sofcon India Pvt Ltd training programsDocument38 pagesSofcon India Pvt Ltd training programsAmit Jain100% (1)
- Unit - I Overview of Embedded Systems Characteristics of Embedded SystemsDocument51 pagesUnit - I Overview of Embedded Systems Characteristics of Embedded SystemsKushal RajvanshiNo ratings yet
- Untitled DocumentDocument46 pagesUntitled DocumentANIL BELLAMKONDANo ratings yet
- Bluetooth Controlled RobotDocument85 pagesBluetooth Controlled Robotmadhukar sunnyNo ratings yet
- Embedded System Unit1Document52 pagesEmbedded System Unit1Ashish SinglaNo ratings yet
- Please Read: A Personal Appeal From Wikipedia Founder Jimmy WalesDocument19 pagesPlease Read: A Personal Appeal From Wikipedia Founder Jimmy WalesEr Sandeep KumarNo ratings yet
- What Is Ubiquitous System, Explain How Ubiquitous System Can Be Created?Document8 pagesWhat Is Ubiquitous System, Explain How Ubiquitous System Can Be Created?Rozan FarhanNo ratings yet
- MicroprocessorsDocument25 pagesMicroprocessorsKarneshwar SannamaniNo ratings yet
- BATCH-6Document75 pagesBATCH-6kota naikNo ratings yet
- 1st Review Report - Smart Distribution SystemDocument54 pages1st Review Report - Smart Distribution SystemretechNo ratings yet
- Embedded Systems:: Hacking of Electronic EquipmentsDocument76 pagesEmbedded Systems:: Hacking of Electronic EquipmentsKailashi Chandra SekharNo ratings yet
- Home AutomationDocument54 pagesHome AutomationSmartselect ShyamlaNo ratings yet
- What Is An Embedded System?Document25 pagesWhat Is An Embedded System?Aadarsh Kumar SinghNo ratings yet
- LGB-19DZT User ManualDocument66 pagesLGB-19DZT User Manualshaft22No ratings yet
- Assembly Manual: MS: SEA 118Document31 pagesAssembly Manual: MS: SEA 118AeroinformadoNo ratings yet
- DX100 InstructonsDocument328 pagesDX100 InstructonsTrí ChốtNo ratings yet
- Fabrication of Multi Purpose Machine Drilling Cutting Milling ShapingDocument73 pagesFabrication of Multi Purpose Machine Drilling Cutting Milling ShapingKrishna Mouli KasimiNo ratings yet
- Appendix I List of Attached Conceptual & Reference Drawings PTS-20WM319Document13 pagesAppendix I List of Attached Conceptual & Reference Drawings PTS-20WM319Durgaprasad RyaliNo ratings yet
- Staubsaugen Erfrischend Anders.: Der Beutellose SaugerDocument20 pagesStaubsaugen Erfrischend Anders.: Der Beutellose SaugerlubeckuNo ratings yet
- CH2 - DKN 5162 Marine Engineering Practice and Legislation - CHAPTER 2 - BEDPLATE-1Document34 pagesCH2 - DKN 5162 Marine Engineering Practice and Legislation - CHAPTER 2 - BEDPLATE-1Priya Sweetie100% (1)
- Maintenance Parts List: Service DocumentsDocument104 pagesMaintenance Parts List: Service DocumentsCristian GuevaraNo ratings yet
- Iq 7plus Acm Ds en UsDocument2 pagesIq 7plus Acm Ds en UsdahdahNo ratings yet
- Power Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDocument30 pagesPower Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDurgeshkumar RajputNo ratings yet
- Sim300 An Handset Design v1.02Document10 pagesSim300 An Handset Design v1.02ankush_laxmanNo ratings yet
- Bill of MaterialsDocument6 pagesBill of MaterialsJames Howell Nacion50% (2)
- 04 Inspection EquipmentDocument3 pages04 Inspection Equipmentsica1234No ratings yet
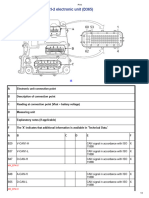
- CAN Connections of PMCI-2 Electronic Unit (D365)Document3 pagesCAN Connections of PMCI-2 Electronic Unit (D365)Oscar De la fuenteNo ratings yet
- Integration Guide: Bacnet and Modbus Rtu Communication InterfacesDocument24 pagesIntegration Guide: Bacnet and Modbus Rtu Communication InterfacesMihai IavorschiNo ratings yet
- Mek-2500 Rotoforce™: Rotating Consistency TransmitterDocument3 pagesMek-2500 Rotoforce™: Rotating Consistency TransmitterGunandar GunandarNo ratings yet
- Conect OresDocument172 pagesConect OresJuan Diego García LópezNo ratings yet
- Gesture Based Home AutomationDocument13 pagesGesture Based Home AutomationAman yadavNo ratings yet
- Manual de ServiçoDocument641 pagesManual de ServiçoPauloNo ratings yet
- AS-100 Tower Crane Safety System Installation ManualDocument67 pagesAS-100 Tower Crane Safety System Installation Manualbaraa alkhabbazNo ratings yet
- Ceiling Concealed DuctsDocument2 pagesCeiling Concealed Ductsvishal vananiNo ratings yet
- Ce CB CC ConfigurationDocument4 pagesCe CB CC ConfigurationKrishna GhimireNo ratings yet
- LAB 4.1+updatedDocument7 pagesLAB 4.1+updatedSohaib ChoudharyNo ratings yet
- (GEB22 AC Drilling Motors) MAS6000/MAS7000 DrawworksDocument9 pages(GEB22 AC Drilling Motors) MAS6000/MAS7000 DrawworksAli AliNo ratings yet
- HF ConverterDocument10 pagesHF Convertersilva98No ratings yet
- Rotor Balancing in TurbochargersDocument2 pagesRotor Balancing in TurbochargersYASSERNo ratings yet
- FireFinder XLS Advanced Fire Alarm Control Panel Data Sheet A6V10238846 Us enDocument12 pagesFireFinder XLS Advanced Fire Alarm Control Panel Data Sheet A6V10238846 Us enMarcio CardosoNo ratings yet
- Clamping ForceDocument3 pagesClamping ForceabcNo ratings yet
- Circuit Diagram Chapter 15Document26 pagesCircuit Diagram Chapter 15Maz Ariez EkaNo ratings yet
- Panasonic KX-TG6721 User ManualDocument52 pagesPanasonic KX-TG6721 User ManualChris Lewis100% (1)