You might also like
- Performance Comparison of Closed-Form Least Squares Algorithms For Hyperbolic 3-D PositioningDocument24 pagesPerformance Comparison of Closed-Form Least Squares Algorithms For Hyperbolic 3-D PositioningAbdallah AmroNo ratings yet
- MIMO Radar A Idea Whose Time Has ComeDocument8 pagesMIMO Radar A Idea Whose Time Has Cometrongnguyen29No ratings yet
- NS2 Simulator Capabilities in Nodes LocalizationDocument5 pagesNS2 Simulator Capabilities in Nodes LocalizationMaris WaranNo ratings yet
- Performance Comparison of Doppler Scale Estimation Methods For Underwater Acoustic OfdmDocument12 pagesPerformance Comparison of Doppler Scale Estimation Methods For Underwater Acoustic OfdmLibotNo ratings yet
- A Hybrid Cooperative Spectrum Sensing Technique For Cognitive Radio Networks Using Linear ClassifiersDocument6 pagesA Hybrid Cooperative Spectrum Sensing Technique For Cognitive Radio Networks Using Linear Classifierssuchi87No ratings yet
- VHF Radar Target Detection in The Presence of Clutter: Boriana VassilevaDocument8 pagesVHF Radar Target Detection in The Presence of Clutter: Boriana VassilevaGhada HamzaNo ratings yet
- A Low Cost TDOA Localization System: Setup, Challenges and ResultsDocument4 pagesA Low Cost TDOA Localization System: Setup, Challenges and Resultscuteabhi47No ratings yet
- Microwave FMCW RadarDocument48 pagesMicrowave FMCW RadarPranabKumarGoswami100% (1)
- BER Analysis of Wavelet Based OFDM Using Different Modulation TechniquesDocument5 pagesBER Analysis of Wavelet Based OFDM Using Different Modulation TechniquesMakaran PatilNo ratings yet
- 11IPST060Document6 pages11IPST060Kunzes DolkarNo ratings yet
- Transmission of High-Speed (GB/S) Direct-Detection Optical OFDM SuperchannelDocument10 pagesTransmission of High-Speed (GB/S) Direct-Detection Optical OFDM SuperchannelAliAzarniaNo ratings yet
- Doppler Radar Report for Warsaw UniversityDocument14 pagesDoppler Radar Report for Warsaw UniversityZaïd BouslikhinNo ratings yet
- High-Resolution Direct Position Determination Using MVDRDocument13 pagesHigh-Resolution Direct Position Determination Using MVDRMostafa NaseriNo ratings yet
- Oe陕师大0219A Novel Methodology to Directly PreDocument13 pagesOe陕师大0219A Novel Methodology to Directly Pre费曼牛顿No ratings yet
- Pulse Radar CharacteristicsDocument15 pagesPulse Radar CharacteristicsBRIGHT TZZZY CHINGWENANo ratings yet
- RSSI (Received Signal Strength Indicator)Document4 pagesRSSI (Received Signal Strength Indicator)Dr. Md. Salah Uddin YusufNo ratings yet
- Three-Component LDA Measurements: P. BuchhaveDocument7 pagesThree-Component LDA Measurements: P. BuchhavessssbossssNo ratings yet
- Estimating Location of Radio Devices Using TDOA and Doppler ShiftsDocument14 pagesEstimating Location of Radio Devices Using TDOA and Doppler ShiftsNivethitha JayarajNo ratings yet
- CW Doppler Radar Measures Range RateDocument6 pagesCW Doppler Radar Measures Range RateVenkat SaiNo ratings yet
- Coh 1Document2 pagesCoh 1chunnumunnuNo ratings yet
- Associated Data For Wave Using Commercial RadarDocument7 pagesAssociated Data For Wave Using Commercial RadarSaga LabaNo ratings yet
- Crosby 7B3Document7 pagesCrosby 7B3Евгений ПереверзевNo ratings yet
- On Timing Offset and Frequency Offset Estimation in LTE UplinkDocument10 pagesOn Timing Offset and Frequency Offset Estimation in LTE UplinkAjay SharmaNo ratings yet
- A Two-Stage Spectrum Sensing Scheme Based On Energy Detection and A Novel Multitaper MethodDocument10 pagesA Two-Stage Spectrum Sensing Scheme Based On Energy Detection and A Novel Multitaper MethodNISHANT395No ratings yet
- Radar Technology: Assignment 1Document28 pagesRadar Technology: Assignment 1Shami DavesharNo ratings yet
- Term Paper TopicsDocument15 pagesTerm Paper TopicsAamir Imam KhanNo ratings yet
- Multipath Cross-Correlation Flowmeters: V. Skwarek and V. HansDocument6 pagesMultipath Cross-Correlation Flowmeters: V. Skwarek and V. HansriannataNo ratings yet
- Performance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsDocument10 pagesPerformance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsAbdul RahimNo ratings yet
- Doppler Spread Estimation in Mobile Communication SystemsDocument5 pagesDoppler Spread Estimation in Mobile Communication Systems82416149No ratings yet
- Passive Coherent Location Radar – The Silent ThreatDocument5 pagesPassive Coherent Location Radar – The Silent ThreatAyas AhmedNo ratings yet
- Ship detection using morphological component analysis of radar imagesDocument9 pagesShip detection using morphological component analysis of radar imagesRaghul RamasamyNo ratings yet
- FM radio based bistatic radar detection and trackingDocument9 pagesFM radio based bistatic radar detection and trackingSaurav PandaNo ratings yet
- Delay Spread Estimation for Adaptive OFDMDocument6 pagesDelay Spread Estimation for Adaptive OFDMsunitkdspNo ratings yet
- GCCDocument14 pagesGCCAlif Bayu WindrawanNo ratings yet
- CIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformDocument9 pagesCIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformkamuikNo ratings yet
- Sensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaDocument19 pagesSensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaSupermanNo ratings yet
- 3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsDocument14 pages3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- RSN 2022 11 0352 - Proof - HiDocument7 pagesRSN 2022 11 0352 - Proof - HiMohamed elamine NOUARNo ratings yet
- A Time Reversal Transmission Approach For Multiuser UWB CommunicationsDocument9 pagesA Time Reversal Transmission Approach For Multiuser UWB CommunicationsPhu NguyenNo ratings yet
- Real Time Position Location & Tracking (PL&T) Using Prediction Filter and Integrated Zone Finding in OFDM ChannelDocument10 pagesReal Time Position Location & Tracking (PL&T) Using Prediction Filter and Integrated Zone Finding in OFDM ChannelIlker BalkanNo ratings yet
- Guided Waves Mode Discrimination in Pipes NDT Based On The Matching Pursuit MethodDocument7 pagesGuided Waves Mode Discrimination in Pipes NDT Based On The Matching Pursuit MethodAndreea-Maria CrinteaNo ratings yet
- RF SENSING ImpairmentsDocument6 pagesRF SENSING Impairmentsparientola90No ratings yet
- Partial Discharge Localization in Transformers Using UHF Detection MethodDocument10 pagesPartial Discharge Localization in Transformers Using UHF Detection Methodmahdi77noroNo ratings yet
- Ieee 65Document4 pagesIeee 65hasan1100No ratings yet
- Direction Finding of Multiple Wide-Band Emitters Using State Space ModelingDocument26 pagesDirection Finding of Multiple Wide-Band Emitters Using State Space ModelingdanosieckiNo ratings yet
- Basic Radar System Block DiagramDocument9 pagesBasic Radar System Block Diagrambapiraju saripellaNo ratings yet
- Kalman-Filter-Based Channel Estimation For Orthogonal Frequency-Division Multiplexing Systems in Time-Varying ChannelsDocument7 pagesKalman-Filter-Based Channel Estimation For Orthogonal Frequency-Division Multiplexing Systems in Time-Varying ChannelsDaniel DaiNo ratings yet
- Estimation by Cross-Correlation of The Number of Nodes in Underwater NetworksDocument6 pagesEstimation by Cross-Correlation of The Number of Nodes in Underwater NetworksMD Shahidul HoqueNo ratings yet
- Radar and Navigational Laboratory ManualDocument35 pagesRadar and Navigational Laboratory ManualRahul RanjanNo ratings yet
- DXR10 Experimental ManualDocument67 pagesDXR10 Experimental Manualtanuj125No ratings yet
- Tracki NG RadarDocument4 pagesTracki NG RadarSugunaNo ratings yet
- Channel Estimation Algorithms For OFDM SystemsDocument5 pagesChannel Estimation Algorithms For OFDM Systemsdearprasanta6015No ratings yet
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDocument4 pagesMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXkhanziaNo ratings yet
- Radar Tech Training IOM-88 Module-CDocument55 pagesRadar Tech Training IOM-88 Module-CDedi KusnadiNo ratings yet
- Two-Wavelength Phase-Sensitive OTDR Sensor Using Perfect Periodic Correlation Codes For Measurement Range Enhancement, Noise Reduction and Fading CompensationDocument15 pagesTwo-Wavelength Phase-Sensitive OTDR Sensor Using Perfect Periodic Correlation Codes For Measurement Range Enhancement, Noise Reduction and Fading CompensationmanelNo ratings yet
- A Survey On Wireless Position EstimationDocument20 pagesA Survey On Wireless Position EstimationMona GuptaNo ratings yet
- Sensors: Vital-Signs Detector Based On Frequency-Shift Keying RadarDocument17 pagesSensors: Vital-Signs Detector Based On Frequency-Shift Keying RadarYee Kit ChanNo ratings yet
- Sensors: YOLO-Based Simultaneous Target Detection and Classification in Automotive FMCW Radar SystemsDocument15 pagesSensors: YOLO-Based Simultaneous Target Detection and Classification in Automotive FMCW Radar SystemsA. HNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Digital Communications: Courses and Exercises with SolutionsFrom EverandDigital Communications: Courses and Exercises with SolutionsRating: 3 out of 5 stars3/5 (2)
- 4 CP NS-01 BD Draft Part 2 Vol.2 EM Version 11 FINAL REV ADocument1,357 pages4 CP NS-01 BD Draft Part 2 Vol.2 EM Version 11 FINAL REV Asamarendra parida100% (1)
- Sessions 3 and 4: Business Process Re-EngineeringDocument48 pagesSessions 3 and 4: Business Process Re-Engineeringpick YourpetNo ratings yet
- Spekers ProjectDocument2 pagesSpekers ProjectIsa JoyceNo ratings yet
- Load Banks CatalogDocument10 pagesLoad Banks CatalogMehmet Cem AteşNo ratings yet
- Quantum Computing With Spin Qubits in Semiconductor Structures (Computer Physics Communications, Vol. 146, Issue 3) (2002)Document8 pagesQuantum Computing With Spin Qubits in Semiconductor Structures (Computer Physics Communications, Vol. 146, Issue 3) (2002)sepot24093No ratings yet
- Throughput Digram - Logistic Operating Curves in Theory and PracticeDocument21 pagesThroughput Digram - Logistic Operating Curves in Theory and PracticeCibelle LimaNo ratings yet
- Intel Microprocessor I3, I5, I7Document22 pagesIntel Microprocessor I3, I5, I7Himanshu Nath100% (2)
- Produktkatalog BraDocument2 pagesProduktkatalog BraRodrigo ElhailNo ratings yet
- Survey On The Importance of Digital Education in SchoolsDocument7 pagesSurvey On The Importance of Digital Education in Schoolsbriello98No ratings yet
- Data Sheet Ultrastar DC Ha210Document2 pagesData Sheet Ultrastar DC Ha210Marian DiaconescuNo ratings yet
- Tutorial Wirecut PDFDocument77 pagesTutorial Wirecut PDFmfitri83No ratings yet
- TN 2041 Nutanix FilesDocument66 pagesTN 2041 Nutanix FilesAdi YusupNo ratings yet
- Inventory Management For Retail Companies: A Literature Review and Current TrendsDocument9 pagesInventory Management For Retail Companies: A Literature Review and Current Trendstop techi tamizhaNo ratings yet
- Manage project cost reportDocument6 pagesManage project cost reportMonique Marcolin BugeNo ratings yet
- WIRING DIAGRAM Wifi VendoDocument5 pagesWIRING DIAGRAM Wifi VendoDikdik PribadiNo ratings yet
- Algebra Terms and DefinitionsDocument6 pagesAlgebra Terms and DefinitionssNo ratings yet
- Business PlanDocument49 pagesBusiness Plandanie krisyaNo ratings yet
- Bolted Angle CleatdesignDocument1 pageBolted Angle CleatdesignAnonymous koR9VtfNo ratings yet
- Sonnax HP 4L60E Catalog v1Document12 pagesSonnax HP 4L60E Catalog v1Brad Franc100% (2)
- Rightpower SCFR1200 1200VA UPSDocument3 pagesRightpower SCFR1200 1200VA UPSWearn Jian LaiNo ratings yet
- 3 - MT 103 - 202 Base Procedure For Receiver Review and Comments AoDocument4 pages3 - MT 103 - 202 Base Procedure For Receiver Review and Comments Aouink wowNo ratings yet
- VERTECO Cartridge Overview: Biological Washroom Cleaning SolutionDocument2 pagesVERTECO Cartridge Overview: Biological Washroom Cleaning Solutiontvshow zeeNo ratings yet
- IEC Standards and Nonconventional Instrument TransformersDocument9 pagesIEC Standards and Nonconventional Instrument TransformersgilbertomjcNo ratings yet
- AGIP GREASE SM 2 Molybdenum GreaseDocument1 pageAGIP GREASE SM 2 Molybdenum GreaseranjanguptNo ratings yet
- Datasheet Uni M QNB NS enDocument2 pagesDatasheet Uni M QNB NS enLinh dươngNo ratings yet
- Registered Contractor List PPADBDocument3 pagesRegistered Contractor List PPADBGaone Lydia SetlhodiNo ratings yet
- Vendor Selection and DevelopmentDocument11 pagesVendor Selection and DevelopmentAsher RamishNo ratings yet
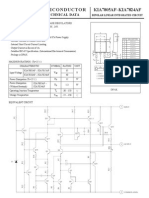
- KIA7805Document17 pagesKIA7805Thomas1JessieNo ratings yet
- Thesis On Electronic PaymentDocument6 pagesThesis On Electronic Paymentgbvhhgpj100% (2)
- A-2. System DesignDocument93 pagesA-2. System DesignDangolNo ratings yet