You might also like
- OSD 6-91-067 - Instruction Manual - Ed. 1207Document186 pagesOSD 6-91-067 - Instruction Manual - Ed. 1207Centrifugal Separator100% (1)
- 1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg PlatformsDocument7 pages1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg Platformsshubham khodiyarNo ratings yet
- Numerical Study of Uncoupled and CoDocument17 pagesNumerical Study of Uncoupled and CoTaah RIGONo ratings yet
- Nonlinear Analysis of Sloshing and Floating Body Coupled M - 2018 - Ocean EngineDocument17 pagesNonlinear Analysis of Sloshing and Floating Body Coupled M - 2018 - Ocean EngineTuong BuiNo ratings yet
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFDocument7 pagesTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaNo ratings yet
- On The Stopping Criterion To Apply The Hilbert Huang Transform Method To Sea Wave RecordsDocument11 pagesOn The Stopping Criterion To Apply The Hilbert Huang Transform Method To Sea Wave RecordsbernicevdkooijNo ratings yet
- An Analysis of Hydrodynamic Interaction of Floating Multi-Body Using Higher-Order Boundary Element MethodDocument1 pageAn Analysis of Hydrodynamic Interaction of Floating Multi-Body Using Higher-Order Boundary Element MethodseetaramayyaNo ratings yet
- Numerical Investigation of A Stepped Planing Hull in Calm WaterDocument8 pagesNumerical Investigation of A Stepped Planing Hull in Calm WaterMarsel GabrielNo ratings yet
- Translational and Rotational Dynamics of A Large Buoyant SphereDocument10 pagesTranslational and Rotational Dynamics of A Large Buoyant SphereOsama SamhaNo ratings yet
- Hydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDocument10 pagesHydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDr R Panneer SelvamNo ratings yet
- Non-Linear Input/output Analysis: Application To Boundary Layer TransitionDocument30 pagesNon-Linear Input/output Analysis: Application To Boundary Layer TransitionahmadalsaiahNo ratings yet
- Closed-Loop Turbulence Control Using Machine LearningDocument10 pagesClosed-Loop Turbulence Control Using Machine LearningamourqtriNo ratings yet
- Renewable Energy: Macheng Shen, Zhiqiang Hu, Geliang LiuDocument13 pagesRenewable Energy: Macheng Shen, Zhiqiang Hu, Geliang LiuAhmadFahcruddinNo ratings yet
- Frequency Domain Analysis For Float-Over Barge Subjected To Random WavesDocument5 pagesFrequency Domain Analysis For Float-Over Barge Subjected To Random WavesVinay PasiNo ratings yet
- On Instantaneous FrequencyDocument53 pagesOn Instantaneous Frequencyopenid_AePkLAJcNo ratings yet
- Ocean Engineering: A C B A C A D e eDocument23 pagesOcean Engineering: A C B A C A D e eFSilvaNo ratings yet
- 1.1 Background and MotivationDocument36 pages1.1 Background and MotivationZainab Minhas RajpootNo ratings yet
- Term Paper OF Signal and System (Ece 209) : Submitted By:-Submitted To: - MR - Govardhana Rao Talluri Dept - of EceDocument15 pagesTerm Paper OF Signal and System (Ece 209) : Submitted By:-Submitted To: - MR - Govardhana Rao Talluri Dept - of Eceravi21041989No ratings yet
- 17DCW 54wenDocument8 pages17DCW 54wenmax wayneNo ratings yet
- Applied Ocean Research: Chongwei ZhangDocument19 pagesApplied Ocean Research: Chongwei ZhangFrancisco RomanNo ratings yet
- Ships and Offshore StructuresDocument12 pagesShips and Offshore StructuresSoledad AceitunoNo ratings yet
- Using A Fuzzy Piecewise Regression Analysis To Predict The Nonlinear Time-Series of Turbulent Flows With Automatic Change-Point DetectionDocument26 pagesUsing A Fuzzy Piecewise Regression Analysis To Predict The Nonlinear Time-Series of Turbulent Flows With Automatic Change-Point Detectionerm1986No ratings yet
- Analysis of The Blade Boundary-Layer Flow of A Marine Propeller Using A RANSDocument16 pagesAnalysis of The Blade Boundary-Layer Flow of A Marine Propeller Using A RANSFreddie RomeroNo ratings yet
- The Influence of Mooring System in Rogue Wave Impact On AnDocument14 pagesThe Influence of Mooring System in Rogue Wave Impact On Anmohdsolihat1No ratings yet
- Comprehensive Study On The Results of Tension Leg Platform ResponsesDocument13 pagesComprehensive Study On The Results of Tension Leg Platform Responsesir_zainalNo ratings yet
- 1906 05448Document36 pages1906 05448PGR ING.No ratings yet
- Paper3 - Simultaneous Optimization of Force and Placement of Friction Dampers Under Seismic LoadingDocument23 pagesPaper3 - Simultaneous Optimization of Force and Placement of Friction Dampers Under Seismic LoadingRodrigo LezametaNo ratings yet
- Laminar and Transitional Liquid Metal Duct Flow NeDocument29 pagesLaminar and Transitional Liquid Metal Duct Flow NeabdullaalakourNo ratings yet
- E Ects of Surface-Active Agents On Mass Transfer of A Solute Into Single Buoyancy Driven Drops in Solvent Extraction SystemsDocument14 pagesE Ects of Surface-Active Agents On Mass Transfer of A Solute Into Single Buoyancy Driven Drops in Solvent Extraction SystemsSahand NekoeianNo ratings yet
- Motion Predictions of Ships in Actual Operating CoDocument13 pagesMotion Predictions of Ships in Actual Operating Coelmariner.24No ratings yet
- Coupled Dynamic Response of Moored FPSO With RisersDocument8 pagesCoupled Dynamic Response of Moored FPSO With RisersWynne LukNo ratings yet
- Nonlinear Vibration Analysis of An Axially Moving Drillstring System With Time Dependent Axial Load and Axial Velocity in Inclined WellDocument18 pagesNonlinear Vibration Analysis of An Axially Moving Drillstring System With Time Dependent Axial Load and Axial Velocity in Inclined Wellmohdsolihat1100% (1)
- Unit 5Document48 pagesUnit 5rathiNo ratings yet
- Ilkhani 2016Document34 pagesIlkhani 2016prasad joshiNo ratings yet
- 2017 An Improved Quasi-Static Model For Mooring-Induced Damping Estimation Using in The Truncation Design of Mooring SystemDocument8 pages2017 An Improved Quasi-Static Model For Mooring-Induced Damping Estimation Using in The Truncation Design of Mooring SystemXinkuan YanNo ratings yet
- Chaotic Dynamics and Ocean Wave StatisticsDocument8 pagesChaotic Dynamics and Ocean Wave StatisticsAndres GamboaNo ratings yet
- Bachmann Mehammer 2018 J. Phys. Conf. Ser. 1104 012008Document11 pagesBachmann Mehammer 2018 J. Phys. Conf. Ser. 1104 012008Teckzhi TanNo ratings yet
- 10 1108 - Ec 12 2014 0251Document19 pages10 1108 - Ec 12 2014 0251mallikarjun BhandiwadNo ratings yet
- Numerical Study of Receptivity Mechanism of Bypass Transition On Flat-Plate Boundary Layer Subject To Synthesized Freestream TurbulenceDocument1 pageNumerical Study of Receptivity Mechanism of Bypass Transition On Flat-Plate Boundary Layer Subject To Synthesized Freestream TurbulenceVej JuttNo ratings yet
- Asep Sulaeman, Galih Habsoro SundoroDocument10 pagesAsep Sulaeman, Galih Habsoro SundoroJoko NugrohoNo ratings yet
- Evaluation of Optimum Profile ModificatiDocument19 pagesEvaluation of Optimum Profile ModificatiAlan D'CruzNo ratings yet
- Abstract: Crude Oil Transport Is An Essential Task in OilDocument4 pagesAbstract: Crude Oil Transport Is An Essential Task in OilJetalNo ratings yet
- Alavimehr 2019Document13 pagesAlavimehr 2019Mohamad SadeghiNo ratings yet
- Response Behaviour of Triangular Tension Leg Platforms Under Impact LoadingDocument9 pagesResponse Behaviour of Triangular Tension Leg Platforms Under Impact Loadingashutosh.srvNo ratings yet
- Effects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsDocument13 pagesEffects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsabuNo ratings yet
- TLFL Using Travelling Waves and Extreme Learning MachineDocument7 pagesTLFL Using Travelling Waves and Extreme Learning MachineGabriel MessiasNo ratings yet
- Design2 SrinivasanDocument15 pagesDesign2 SrinivasanXa MauNo ratings yet
- High Fidelity Numerical Simulations On The UnsteadDocument15 pagesHigh Fidelity Numerical Simulations On The Unsteadyangdw1998No ratings yet
- Integration of Meanline and One-Dimensional Methods For Prediction of Pulsating Performance of A Turbocharger TurbineDocument12 pagesIntegration of Meanline and One-Dimensional Methods For Prediction of Pulsating Performance of A Turbocharger TurbineAle RomaNo ratings yet
- State-Space Modeling (SSM)Document11 pagesState-Space Modeling (SSM)Diyanosh HedayatiNo ratings yet
- Accepted Manuscript: Chemical PhysicsDocument14 pagesAccepted Manuscript: Chemical PhysicsChaitali ParalikarNo ratings yet
- Proceedings of The 13-th (2003) ConferenceDocument7 pagesProceedings of The 13-th (2003) ConferenceYuriy KrayniyNo ratings yet
- 10.1515 - Eng 2015 0037Document6 pages10.1515 - Eng 2015 0037SUNIL SHARMANo ratings yet
- 1979-C.L。Kirk and E.UDocument11 pages1979-C.L。Kirk and E.UShuai MengNo ratings yet
- Shemer - Ee - 2015 - Steep Unidirectional Wave Groups-Fully Nonlinear Simulations VsDocument11 pagesShemer - Ee - 2015 - Steep Unidirectional Wave Groups-Fully Nonlinear Simulations Vsniqiang95No ratings yet
- International Journal For Computational Methods in Engineering Science and MechanicsDocument20 pagesInternational Journal For Computational Methods in Engineering Science and MechanicsBinita ChouhanNo ratings yet
- Applied Ocean Research: R.A. Watai, F. Ruggeri, A.N. SimosDocument22 pagesApplied Ocean Research: R.A. Watai, F. Ruggeri, A.N. SimosVictor DaggersNo ratings yet
- Coupled Longitudinal-Transverse Dynamics of A Marine Propulsion Shafting Under Superharmonic ResonancesDocument18 pagesCoupled Longitudinal-Transverse Dynamics of A Marine Propulsion Shafting Under Superharmonic ResonancesAnatoly LebedevNo ratings yet
- Applsci 09 00259 PDFDocument17 pagesApplsci 09 00259 PDFMohamed ElsayedNo ratings yet
- 1D Mathematical Modeling of Debris FlowDocument13 pages1D Mathematical Modeling of Debris FlowIvan SalazarNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Ss40F, Ss40Af: Bipolar Hall-Effect Digital Position Sensor IcsDocument6 pagesSs40F, Ss40Af: Bipolar Hall-Effect Digital Position Sensor IcsNaur AvilaNo ratings yet
- RELATION BETWEEN FIRING ANGLE OF THREE-PHASE RectifierDocument7 pagesRELATION BETWEEN FIRING ANGLE OF THREE-PHASE Rectifier01666754614No ratings yet
- Altivar Machine ATV320 - ATV320U40M3CDocument10 pagesAltivar Machine ATV320 - ATV320U40M3CGlenn Midel Delos SantosNo ratings yet
- Review Report of Blast Resistant Properties of Composite Structures in Naval Vessels.Document125 pagesReview Report of Blast Resistant Properties of Composite Structures in Naval Vessels.Ali HassanNo ratings yet
- Shear Properties of Sandwich Core Materials: Standard Test Method ForDocument4 pagesShear Properties of Sandwich Core Materials: Standard Test Method ForCarlos Raul Caballero LeonNo ratings yet
- Redox and Equivalent Concept Lecture 6 (17th December 2022) Handout and HomeworkDocument203 pagesRedox and Equivalent Concept Lecture 6 (17th December 2022) Handout and HomeworkanilpurnimakothariNo ratings yet
- FMDC Past Paper PakLearningSpotDocument17 pagesFMDC Past Paper PakLearningSpotMuneeb UlHasaanNo ratings yet
- Temperature Rise of Power Transformers: Comments and PROPOSALS TO IEC 60076-2:2011Document11 pagesTemperature Rise of Power Transformers: Comments and PROPOSALS TO IEC 60076-2:2011Kuljinder VirdiNo ratings yet
- Introduction To Thyristors PDFDocument9 pagesIntroduction To Thyristors PDFAnnie BordsNo ratings yet
- Assignment-1 (Partial Differential Equations (PDE) For Engineers)Document3 pagesAssignment-1 (Partial Differential Equations (PDE) For Engineers)Shivam UpadhyayNo ratings yet
- Waves: Name - TeacherDocument47 pagesWaves: Name - TeachersaadNo ratings yet
- Mensuration Part - IVDocument8 pagesMensuration Part - IVDebjani MondalNo ratings yet
- 5D11-12 Simple Equations (2) - ConsolidatingDocument4 pages5D11-12 Simple Equations (2) - Consolidatingiam.averychengNo ratings yet
- Load-Stopping - User's GuideDocument4 pagesLoad-Stopping - User's GuideNguyễn Thị HườngNo ratings yet
- Introduction & Classification of Cams & Followers by Ramniwas Singh Lecture 03Document13 pagesIntroduction & Classification of Cams & Followers by Ramniwas Singh Lecture 03bharatNo ratings yet
- LED Light RepairingDocument11 pagesLED Light RepairingDeepanwita SarNo ratings yet
- VRF Atom Series 50Hz - Heat PumpDocument10 pagesVRF Atom Series 50Hz - Heat Pumpperfectair25No ratings yet
- R.E.M. Internship ReportDocument40 pagesR.E.M. Internship ReportHitesh SoniNo ratings yet
- Math 6 Unit 8 Volume of Solids and LiquidsDocument1 pageMath 6 Unit 8 Volume of Solids and LiquidsRobi AkmalNo ratings yet
- 1."A High-Power Quality Battery Charger For Light Electric Vehicle Using Switched Inductor PFC Converter,"Document6 pages1."A High-Power Quality Battery Charger For Light Electric Vehicle Using Switched Inductor PFC Converter,"ARAVINTH RAJNo ratings yet
- Casse Vide Ari 665001-2Document2 pagesCasse Vide Ari 665001-2Belgacem ArramiNo ratings yet
- Boomer E2 C - 30 - 9851 2451 01dDocument4 pagesBoomer E2 C - 30 - 9851 2451 01dPablo Luis Pérez PostigoNo ratings yet
- Integral Values For The Poettmann Method For Determining Static BHPDocument2 pagesIntegral Values For The Poettmann Method For Determining Static BHPWilder GanozaNo ratings yet
- MK4 S (With ONDA Technology) : Contactless Magnetostrictive Linear Position Transducer (Synchronous Serial Output)Document4 pagesMK4 S (With ONDA Technology) : Contactless Magnetostrictive Linear Position Transducer (Synchronous Serial Output)Gopal HegdeNo ratings yet
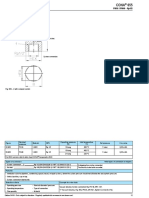
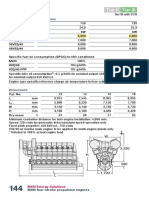
- Speed R/min Mep Bar KW KW 12V32/40 14V32/40 16V32/40 18V32/40 Specific Fuel Oil Consumption (SFOC) To ISO Conditions MCR V32/40 V32/40 FPPDocument1 pageSpeed R/min Mep Bar KW KW 12V32/40 14V32/40 16V32/40 18V32/40 Specific Fuel Oil Consumption (SFOC) To ISO Conditions MCR V32/40 V32/40 FPPghostt123No ratings yet
- Hardware Installation Manual PM240-2 2020Document98 pagesHardware Installation Manual PM240-2 2020Chung Nguyễn TuấnNo ratings yet
- Brosur Master SteelDocument4 pagesBrosur Master SteelAhmad Hafidz Bukhori IINo ratings yet
- BF Dry GCP S-13 PDFDocument2 pagesBF Dry GCP S-13 PDFgautamcool100% (1)
- GBM Schematic DigramDocument22 pagesGBM Schematic DigrampadmawarNo ratings yet