You might also like
- Microstepping Motor Controller With Dual Dac: General Description Package OutlineDocument11 pagesMicrostepping Motor Controller With Dual Dac: General Description Package Outlinesimon27cNo ratings yet
- e1750312-ae8c-45db-a900-3c6654649b75Document1 pagee1750312-ae8c-45db-a900-3c6654649b75Ujjwal HiredesaiNo ratings yet
- R4 Res1 R11 Res1 D1 10Mh L1: Netlabel19 13.8 V Netlabel15 12 VDocument1 pageR4 Res1 R11 Res1 D1 10Mh L1: Netlabel19 13.8 V Netlabel15 12 VHicham BoutoucheNo ratings yet
- +3 V, Dual, Serial Input 12-/10-Bit Dacs: Ma/Dac Ma Typical Power ShutdownDocument12 pages+3 V, Dual, Serial Input 12-/10-Bit Dacs: Ma/Dac Ma Typical Power ShutdownCarlos TibussiNo ratings yet
- 6LB176 PDFDocument22 pages6LB176 PDFWill ?No ratings yet
- Temperature Controlled FanDocument1 pageTemperature Controlled FanThe Trading FreakNo ratings yet
- Schematic - New 12V Battery Charger Circuit! - 2023-10-26Document1 pageSchematic - New 12V Battery Charger Circuit! - 2023-10-26stellampuka5No ratings yet
- P130-628VX V6.0 - Circuit DiagramDocument13 pagesP130-628VX V6.0 - Circuit DiagramAndres Alegria80% (15)
- Schematic FS2-Camera FS2Document1 pageSchematic FS2-Camera FS2anon_289738722No ratings yet
- TRẦN ĐẮC PHỤNG.MẠCH ĐIỆNDocument2 pagesTRẦN ĐẮC PHỤNG.MẠCH ĐIỆNxuanlocNo ratings yet
- Digital Tilt Sensor SCH PDFDocument2 pagesDigital Tilt Sensor SCH PDFRafael Pereira AzevedoNo ratings yet
- R1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0Document1 pageR1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0joxNo ratings yet
- Arduino TempDocument1 pageArduino TempSebastian LopezNo ratings yet
- Arduino Primo Core v02 SchematicsDocument4 pagesArduino Primo Core v02 SchematicsSamudera Al HakamNo ratings yet
- Monkmakesduino Arduino Compatible Board SchematicDocument1 pageMonkmakesduino Arduino Compatible Board SchematicWagner Gómez100% (1)
- Schematic PrintsDocument1 pageSchematic Printsthong lyNo ratings yet
- Esquematico Sensor ArduinoDocument1 pageEsquematico Sensor Arduinoag5096347No ratings yet
- SwitchDocument1 pageSwitchEmmanuel AvegnonNo ratings yet
- KDI49QT542LNT Main Board P75-628VX V6.0 Circuit DiagramDocument13 pagesKDI49QT542LNT Main Board P75-628VX V6.0 Circuit DiagramAndres AlegriaNo ratings yet
- Schematic 0G 00005677 Mod Dimmer 5A 1L PDFDocument1 pageSchematic 0G 00005677 Mod Dimmer 5A 1L PDFvictor maurizioNo ratings yet
- Module Description DM15-A-6U 2.01Document7 pagesModule Description DM15-A-6U 2.01felipebdNo ratings yet
- Step Down Converter V I: 1k R1 10k R2 204-10UYC/S530-A3 Led1Document1 pageStep Down Converter V I: 1k R1 10k R2 204-10UYC/S530-A3 Led1Gaetano CaccavalloNo ratings yet
- TesteDocument1 pageTesteDAMIAN MAURICIO ROBLES TORRESNo ratings yet
- Mach Bao Ve Chap TaiDocument1 pageMach Bao Ve Chap Taidinh vinh nguyenNo ratings yet
- Emc-Wiring BTS7960Document1 pageEmc-Wiring BTS7960Arja'un TeaNo ratings yet
- Emc Wiring Bts7960Document1 pageEmc Wiring Bts7960Fran 15042002No ratings yet
- Smoke-Alarm - FanDocument1 pageSmoke-Alarm - FanramsvsjbNo ratings yet
- Schematic TransmitterDocument1 pageSchematic TransmitterMario Leonel Torres MartinezNo ratings yet
- Schematic Ardu Oscilloscope 2022-01-21 Kes1kt9bmpDocument1 pageSchematic Ardu Oscilloscope 2022-01-21 Kes1kt9bmpinsincos administrativoNo ratings yet
- Tlc372 Lincmos Dual Differential ComparatorsDocument22 pagesTlc372 Lincmos Dual Differential Comparatorsbaxther2010No ratings yet
- TLC 372Document28 pagesTLC 372petruNo ratings yet
- Controlling A MOSFET With Arduino PWMDocument1 pageControlling A MOSFET With Arduino PWMHUK DurraniNo ratings yet
- Schematic - 3.7 Volt Battery Level Indicator Circuit - 2022-12-17Document1 pageSchematic - 3.7 Volt Battery Level Indicator Circuit - 2022-12-17stellampuka5No ratings yet
- Arduino Keypad SCHDocument1 pageArduino Keypad SCHthong lyNo ratings yet
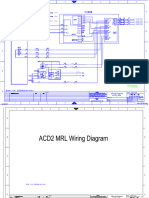
- Otis - Gen2 - Acd2 MRL Xaa2131alDocument72 pagesOtis - Gen2 - Acd2 MRL Xaa2131almusikainaNo ratings yet
- Rs-422 Splitter Circuit DiagramDocument1 pageRs-422 Splitter Circuit DiagramNisar AhmedNo ratings yet
- RS-422 Splitter PDFDocument1 pageRS-422 Splitter PDFNisar AhmedNo ratings yet
- Display 2821BSDocument1 pageDisplay 2821BSOsvaldo Jose Antonio DeloguNo ratings yet
- TLC555CPDocument20 pagesTLC555CPmadindeheadNo ratings yet
- PDF Created With Fineprint Pdffactory Pro Trial VersionDocument1 pagePDF Created With Fineprint Pdffactory Pro Trial VersionAndyNo ratings yet
- PDF Created With Fineprint Pdffactory Pro Trial VersionDocument1 pagePDF Created With Fineprint Pdffactory Pro Trial VersionJusetf ArteagaNo ratings yet
- bd8389fv M eDocument21 pagesbd8389fv M eNicrostNo ratings yet
- BMW ADS Interface Schematics Rev1Document1 pageBMW ADS Interface Schematics Rev1bloodbathNo ratings yet
- Video Door Phone Doorbell Entry System Dx4781mid 8 Apartments Audiovideo Intercom Kit Eight 7 Inch L - NID0016345Document12 pagesVideo Door Phone Doorbell Entry System Dx4781mid 8 Apartments Audiovideo Intercom Kit Eight 7 Inch L - NID0016345nikos kafaloukosNo ratings yet
- D D D D D D D D D D: DescriptionDocument25 pagesD D D D D D D D D D: DescriptionSofywka SofaNo ratings yet
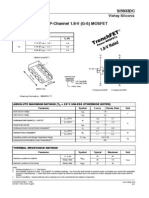
- Si5933DC Dual P-Channel 1.8-V (G-S) MOSFET: Vishay SiliconixDocument5 pagesSi5933DC Dual P-Channel 1.8-V (G-S) MOSFET: Vishay SiliconixfroufouNo ratings yet
- HEF4013B: 1. General DescriptionDocument16 pagesHEF4013B: 1. General DescriptionAlex ZXNo ratings yet
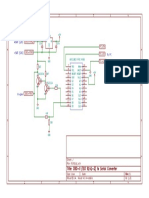
- ISO9141 To Serial SchematicDocument1 pageISO9141 To Serial SchematicAnderson Lopes100% (1)
- Dual - 220V Sensing PDFDocument1 pageDual - 220V Sensing PDFvykhzkztNo ratings yet
- Sacyr Ecebol Oruro 02-1-224144 Packer: FinalDocument130 pagesSacyr Ecebol Oruro 02-1-224144 Packer: FinalProgramadores & PlanificadoresNo ratings yet
- Dac & AdcDocument17 pagesDac & AdcHasiburNo ratings yet
- Dual Stepper Motor Driver: General Description Package OutlineDocument9 pagesDual Stepper Motor Driver: General Description Package OutlinesilictronicNo ratings yet
- Dual Stepper Motor Driver: General Description Package OutlineDocument10 pagesDual Stepper Motor Driver: General Description Package OutlineassimilatNo ratings yet
- PLL-VFO Ver 7.2: Title: Designed by JA2NKD 2019.12.02 1/1 InchDocument6 pagesPLL-VFO Ver 7.2: Title: Designed by JA2NKD 2019.12.02 1/1 InchZdenko Nagy100% (1)
- Surprising HangoDocument1 pageSurprising HangoAlex RuizNo ratings yet
- Electronic Symbols - 3 رموز العناصر الألكترونيةDocument17 pagesElectronic Symbols - 3 رموز العناصر الألكترونيةAli DjemNo ratings yet
- D D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDocument22 pagesD D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDedii KurniawanNo ratings yet
- Reflection Paper 1Document5 pagesReflection Paper 1Juliean Torres AkiatanNo ratings yet
- Ewellery Ndustry: Presentation OnDocument26 pagesEwellery Ndustry: Presentation Onharishgnr0% (1)
- Colibri - DEMSU P01 PDFDocument15 pagesColibri - DEMSU P01 PDFRahul Solanki100% (4)
- Questionnaire: ON Measures For Employee Welfare in HCL InfosystemsDocument3 pagesQuestionnaire: ON Measures For Employee Welfare in HCL Infosystemsseelam manoj sai kumarNo ratings yet
- Ucbackup Faq - Commvault: GeneralDocument8 pagesUcbackup Faq - Commvault: GeneralhherNo ratings yet
- AN610 - Using 24lc21Document9 pagesAN610 - Using 24lc21aurelioewane2022No ratings yet
- NCR Minimum WageDocument2 pagesNCR Minimum WageJohnBataraNo ratings yet
- Perpetual InjunctionsDocument28 pagesPerpetual InjunctionsShubh MahalwarNo ratings yet
- TATA Power - DDL:ConfidentialDocument15 pagesTATA Power - DDL:ConfidentialkarunakaranNo ratings yet
- DFUN Battery Monitoring Solution Project Reference 2022 V5.0Document50 pagesDFUN Battery Monitoring Solution Project Reference 2022 V5.0A Leon RNo ratings yet
- DevelopmentPermission Handbook T&CPDocument43 pagesDevelopmentPermission Handbook T&CPShanmukha KattaNo ratings yet
- RFM How To Automatically Segment Customers Using Purchase Data and A Few Lines of PythonDocument8 pagesRFM How To Automatically Segment Customers Using Purchase Data and A Few Lines of PythonSteven MoietNo ratings yet
- Brazilian Mineral Bottled WaterDocument11 pagesBrazilian Mineral Bottled WaterEdison OchiengNo ratings yet
- Woodward GCP30 Configuration 37278 - BDocument174 pagesWoodward GCP30 Configuration 37278 - BDave Potter100% (1)
- CE5215-Theory and Applications of Cement CompositesDocument10 pagesCE5215-Theory and Applications of Cement CompositesSivaramakrishnaNalluriNo ratings yet
- A Study On Effective Training Programmes in Auto Mobile IndustryDocument7 pagesA Study On Effective Training Programmes in Auto Mobile IndustrySAURABH SINGHNo ratings yet
- Brush Seal Application As Replacement of Labyrinth SealsDocument15 pagesBrush Seal Application As Replacement of Labyrinth SealsGeorge J AlukkalNo ratings yet
- 01 RFI Technical Form BiodataDocument8 pages01 RFI Technical Form BiodataRafiq RizkiNo ratings yet
- Alphacenter Utilities: Installation GuideDocument24 pagesAlphacenter Utilities: Installation GuideJeffersoOnn JulcamanyanNo ratings yet
- Tecplot 360 2013 Scripting ManualDocument306 pagesTecplot 360 2013 Scripting ManualThomas KinseyNo ratings yet
- 16 Easy Steps To Start PCB Circuit DesignDocument10 pages16 Easy Steps To Start PCB Circuit DesignjackNo ratings yet
- DTMF Controlled Robot Without Microcontroller (Aranju Peter)Document10 pagesDTMF Controlled Robot Without Microcontroller (Aranju Peter)adebayo gabrielNo ratings yet
- Chapter 11 Walter Nicholson Microcenomic TheoryDocument15 pagesChapter 11 Walter Nicholson Microcenomic TheoryUmair QaziNo ratings yet
- Self-Instructional Manual (SIM) For Self-Directed Learning (SDL)Document28 pagesSelf-Instructional Manual (SIM) For Self-Directed Learning (SDL)Monique Dianne Dela VegaNo ratings yet
- 7373 16038 1 PBDocument11 pages7373 16038 1 PBkedairekarl UNHASNo ratings yet
- Opel GT Wiring DiagramDocument30 pagesOpel GT Wiring DiagramMassimiliano MarchiNo ratings yet
- CNS Manual Vol III Version 2.0Document54 pagesCNS Manual Vol III Version 2.0rono9796No ratings yet
- SyllabusDocument9 pagesSyllabusrr_rroyal550No ratings yet
- Management Interface For SFP+: Published SFF-8472 Rev 12.4Document43 pagesManagement Interface For SFP+: Published SFF-8472 Rev 12.4Антон ЛузгинNo ratings yet
- Ting Vs Heirs of Lirio - Case DigestDocument2 pagesTing Vs Heirs of Lirio - Case DigestJalieca Lumbria GadongNo ratings yet