You might also like
- Linear AlgebraDocument92 pagesLinear AlgebraArturo Moisés Chávez RodríguezNo ratings yet
- ECE451#6Document24 pagesECE451#6Noha IbrahimNo ratings yet
- FEM Chapter 10Document62 pagesFEM Chapter 10Nävèéñ TëjâNo ratings yet
- Construction of Phase Portraits: I. Analytical Method II. The Method of Isoclines III. Delta MethodDocument51 pagesConstruction of Phase Portraits: I. Analytical Method II. The Method of Isoclines III. Delta Methodvenkat rajNo ratings yet
- 12 FemDocument84 pages12 FemLohit BattuNo ratings yet
- 91lecture3 SSModelDocument49 pages91lecture3 SSModelzoom meetingNo ratings yet
- EC400 Lecture NotesDocument43 pagesEC400 Lecture Notesscribdqwerty19No ratings yet
- Lecture-11-ESO208 - Aug 19 - 2022Document28 pagesLecture-11-ESO208 - Aug 19 - 2022Imad ShaikhNo ratings yet
- 3: Divide and Conquer: Fourier Transform: PolynomialDocument8 pages3: Divide and Conquer: Fourier Transform: PolynomialIrmak ErkolNo ratings yet
- 3: Divide and Conquer: Fourier Transform: PolynomialDocument8 pages3: Divide and Conquer: Fourier Transform: PolynomialCajun SefNo ratings yet
- Quadratic Functions and Their Graphs: Basic MathematicsDocument37 pagesQuadratic Functions and Their Graphs: Basic Mathematicssmk ypkNo ratings yet
- 0 Geophysics-Vector - Operators - SDocument26 pages0 Geophysics-Vector - Operators - S鄭啟宏No ratings yet
- Ms3 Quadratic BookDocument29 pagesMs3 Quadratic BookZaman AnikNo ratings yet
- CurveDocument15 pagesCurveMohammed AlsirajNo ratings yet
- AGE 212: Mathematics Iii: Luanar 2014/2015 Academic Year Lecturer: Wellam KamthunziDocument139 pagesAGE 212: Mathematics Iii: Luanar 2014/2015 Academic Year Lecturer: Wellam KamthunziDonald NgalawaNo ratings yet
- Formula - Engg Maths 1 PDFDocument7 pagesFormula - Engg Maths 1 PDFDhananjayNo ratings yet
- Jones and Couchman 3unit Book 2Document321 pagesJones and Couchman 3unit Book 2Nithon ArufiNo ratings yet
- Higher Order Triangular ElementsDocument54 pagesHigher Order Triangular ElementsLucas MarquesNo ratings yet
- Higher Order FEM Gopi KrishnaDocument98 pagesHigher Order FEM Gopi KrishnaraviNo ratings yet
- Eigenvalues and Eigenvectors Vector Spaces Linear Transformations Matrix DiagonalizationDocument17 pagesEigenvalues and Eigenvectors Vector Spaces Linear Transformations Matrix DiagonalizationphrNo ratings yet
- Nonlinear Dynamics and Chaos - Mit 2002Document72 pagesNonlinear Dynamics and Chaos - Mit 2002Alejandro Hernández MartínezNo ratings yet
- MA5158 Unit I Section 5Document29 pagesMA5158 Unit I Section 5SanjayNo ratings yet
- Prob RV Opt BasicsDocument35 pagesProb RV Opt BasicsjfdweijNo ratings yet
- Finite Element Methods Unit 2Document84 pagesFinite Element Methods Unit 2piravi66No ratings yet
- Chapter 4 - 2 - Dimensional Geometric TransformationsDocument31 pagesChapter 4 - 2 - Dimensional Geometric TransformationsTanveer Ahmed HakroNo ratings yet
- Lecture 03Document93 pagesLecture 03Atiq rifatNo ratings yet
- State Space Canonical Forms ExplainedDocument49 pagesState Space Canonical Forms ExplainedAhmed JamalNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Me310 5 Regression PDFDocument15 pagesMe310 5 Regression PDFiqbalNo ratings yet
- MMY416 4-Noded-Elements - Plane Solids - English - 2020Document96 pagesMMY416 4-Noded-Elements - Plane Solids - English - 2020Pavlos YioukkasNo ratings yet
- Ch6 Presn PDFDocument24 pagesCh6 Presn PDFAlee LópezNo ratings yet
- Lesson 6PS Equation of The Tangent and Normal 3.11.22Document20 pagesLesson 6PS Equation of The Tangent and Normal 3.11.22badriyaNo ratings yet
- ME2 Class Test 1 Sample & Solns0Document6 pagesME2 Class Test 1 Sample & Solns0kakaNo ratings yet
- Mathematics GR 12 Learner Support - Inverse FunctionsDocument9 pagesMathematics GR 12 Learner Support - Inverse Functionsdonz69914No ratings yet
- $RKTDCZODocument23 pages$RKTDCZOXhoniNo ratings yet
- Chapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsDocument6 pagesChapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsSider HsiaoNo ratings yet
- A Brief Survey of Differential Geometry: Adrian Down August 29, 2006Document5 pagesA Brief Survey of Differential Geometry: Adrian Down August 29, 2006NeenaKhanNo ratings yet
- Unit4 TJDocument39 pagesUnit4 TJMohammed ImranNo ratings yet
- Constant Strain Triangular Element: Three Corner NodesDocument15 pagesConstant Strain Triangular Element: Three Corner NodesLAKKANABOINA LAKSHMANARAONo ratings yet
- Systems of Linear Equations and MatricesDocument65 pagesSystems of Linear Equations and MatriceskimiNo ratings yet
- Engineering Mathematics MaterialDocument7 pagesEngineering Mathematics MaterialRajkumarNo ratings yet
- 2 Spatial Autocorrelation (Moran I Dan Scatter Moran)Document38 pages2 Spatial Autocorrelation (Moran I Dan Scatter Moran)Lulu Anata SanurNo ratings yet
- Lec 18 Linear Regression 02122022 010556pmDocument21 pagesLec 18 Linear Regression 02122022 010556pmsadia sagheerNo ratings yet
- Eciv 720 A Advanced Structural Mechanics and Analysis: Isoparametric CSTDocument84 pagesEciv 720 A Advanced Structural Mechanics and Analysis: Isoparametric CSTPacha Khan KhogyaniNo ratings yet
- Shear and StretchDocument4 pagesShear and StretchHayaat Sehgal0% (1)
- Regression InterpolationDocument34 pagesRegression InterpolationFuzzy KNo ratings yet
- 1 - Linear Systems, MatricesDocument73 pages1 - Linear Systems, MatricesPha LêNo ratings yet
- Principal MinorsDocument4 pagesPrincipal Minorsringsred100% (1)
- GMSH Curved PreprintDocument24 pagesGMSH Curved PreprintidanfriNo ratings yet
- Lecture-13 - ESO208 - Aug 31 - 2022Document28 pagesLecture-13 - ESO208 - Aug 31 - 2022Imad ShaikhNo ratings yet
- Graphs, Linear Equations, and FunctionsDocument46 pagesGraphs, Linear Equations, and FunctionsAmit BhararaNo ratings yet
- Mat FungsiDocument36 pagesMat FungsimazayaNo ratings yet
- 4-Noded Rectangular Element Finite Element FormulationDocument27 pages4-Noded Rectangular Element Finite Element FormulationMathiew EstephoNo ratings yet
- Computations in Mechanical Engineering: Systems of Linear EquationsDocument36 pagesComputations in Mechanical Engineering: Systems of Linear EquationsTulong ZhuNo ratings yet
- Lecture 7 State Space Canonical FormsDocument50 pagesLecture 7 State Space Canonical Formsساره بسام نذير قاسمNo ratings yet
- Relations and Functions (Mathematics) : Relation Domain Abscissae Range OrdinatesDocument4 pagesRelations and Functions (Mathematics) : Relation Domain Abscissae Range Ordinatesarnab_rc_007No ratings yet
- 3 - 3 An Useful Overview Of: Definitions Operations SAS/IML Matrix CommandsDocument37 pages3 - 3 An Useful Overview Of: Definitions Operations SAS/IML Matrix Commandsgebreslassie gereziherNo ratings yet
- MECH4450 Introduction To Finite Element MethodsDocument17 pagesMECH4450 Introduction To Finite Element MethodsAnimesh Kumar JhaNo ratings yet
- MATLAB Linear AlgebraDocument39 pagesMATLAB Linear AlgebraRaine OrtegaNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Innovative Kinematics and Control To Improve Robot SpatialDocument6 pagesInnovative Kinematics and Control To Improve Robot SpatialEmir NumanovicNo ratings yet
- Core Maths Syllabus ShsDocument66 pagesCore Maths Syllabus ShsEmmanuel Boakye50% (2)
- Kangaroo of Mathematics 2009 Level Benjamin (Grades 5. and 6.) Austria - 23.3.2009Document4 pagesKangaroo of Mathematics 2009 Level Benjamin (Grades 5. and 6.) Austria - 23.3.2009Nurul Irdina Syazwina0% (1)
- 1) Centre of Gravity, Centre of Mass & CentroidDocument5 pages1) Centre of Gravity, Centre of Mass & CentroidAman deep singhNo ratings yet
- Udgam School For Children: Unit-12 Perimeter, Area and VolumeDocument2 pagesUdgam School For Children: Unit-12 Perimeter, Area and VolumeAnonymous 824Q0SG6iDNo ratings yet
- Math Lesson Plans for Grades 4-6Document14 pagesMath Lesson Plans for Grades 4-6Jay BolanoNo ratings yet
- Mathematics (Class-Vii) Major Test # 01: Section-ADocument4 pagesMathematics (Class-Vii) Major Test # 01: Section-ASandeep SomaiyaNo ratings yet
- Measurement - Workbook 8, Part 1: Worksheet ME8-1 Worksheet ME8-2 Worksheet ME8-3Document2 pagesMeasurement - Workbook 8, Part 1: Worksheet ME8-1 Worksheet ME8-2 Worksheet ME8-3JenonymouslyNo ratings yet
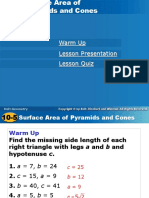
- Warm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometryDocument34 pagesWarm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometrymdmemaNo ratings yet
- SSC Model Test 2019 Higher Mathematics-01Document4 pagesSSC Model Test 2019 Higher Mathematics-01Sainder Pankaj DasNo ratings yet
- Abbotsleigh 2016 3U Trials SolutionsDocument28 pagesAbbotsleigh 2016 3U Trials SolutionsAdnan HameedNo ratings yet
- Nov 2003 P2Document12 pagesNov 2003 P2api-26543952No ratings yet
- 2018 Book InternationalPerspectivesOnTheDocument383 pages2018 Book InternationalPerspectivesOnTheLeidy Cristina CumbalNo ratings yet
- Waverley College Year 7 Mathematics End of Year Examination - Past PaperDocument16 pagesWaverley College Year 7 Mathematics End of Year Examination - Past PaperAstraX EducationNo ratings yet
- Perimeter Lesson Plan 3Document3 pagesPerimeter Lesson Plan 3api-427872820No ratings yet
- AssignmentDocument2 pagesAssignmentWirdawati WaladiNo ratings yet
- NDT Xl-Ut-05.1 Babbit QualityDocument7 pagesNDT Xl-Ut-05.1 Babbit QualityRon KentNo ratings yet
- 2005 Galois Contest Grade 10 Arithmetic Sequences and Tile Game ProblemsDocument3 pages2005 Galois Contest Grade 10 Arithmetic Sequences and Tile Game Problemsscribd-in-actionNo ratings yet
- Department of Education and Kinesiology Lesson Plan Format: Instructional ProceduresDocument2 pagesDepartment of Education and Kinesiology Lesson Plan Format: Instructional Proceduresapi-405435661No ratings yet
- A Picture Has A Height That IsDocument10 pagesA Picture Has A Height That IsDhea CapuyanNo ratings yet
- 10 Math Mensuration CircleDocument4 pages10 Math Mensuration CircleAjay AnandNo ratings yet
- 121 Knec Mathematics SyllabusDocument13 pages121 Knec Mathematics Syllabushyeju sonNo ratings yet
- G10-Math-Mock-2 Paper-Ii PDFDocument17 pagesG10-Math-Mock-2 Paper-Ii PDFgopimytNo ratings yet
- Year 9 Teacher Pack 3Document228 pagesYear 9 Teacher Pack 3Mohamed Fouad100% (12)
- Benjamin 2019 English Valmis v2Document8 pagesBenjamin 2019 English Valmis v2Mariam AtefNo ratings yet
- 6 THDocument38 pages6 THapi-625810741No ratings yet
- PowerPoint Area of A ParallelogramDocument9 pagesPowerPoint Area of A Parallelogramo00547890No ratings yet
- Mathematics: Solving Problems Involving Polynomials and Polynomial EquationsDocument24 pagesMathematics: Solving Problems Involving Polynomials and Polynomial EquationsMateo LladonesNo ratings yet
- Hydraulics Solution Sheet 3 - Forces On Submerged Surfaces: With Gravitational Acceleration GDocument7 pagesHydraulics Solution Sheet 3 - Forces On Submerged Surfaces: With Gravitational Acceleration GSilas Sailas EndjalaNo ratings yet
- 4mb/01r-Que-2023 Jun Edexcel PastpaperDocument24 pages4mb/01r-Que-2023 Jun Edexcel Pastpaperaugust.shwanNo ratings yet