You might also like
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- What can be said about the controllability and observability conditions if the transfer function has poleDocument6 pagesWhat can be said about the controllability and observability conditions if the transfer function has poleMengistu BirukeNo ratings yet
- Control Engineering Compressed WatermarkDocument71 pagesControl Engineering Compressed WatermarkBasava RajNo ratings yet
- FeedCon (Unit 1) PDFDocument17 pagesFeedCon (Unit 1) PDFAbby MacallaNo ratings yet
- Ec3351 Control SystemsDocument18 pagesEc3351 Control SystemsParanthaman GNo ratings yet
- Cpe 315 Feedback Control System LessonsDocument28 pagesCpe 315 Feedback Control System Lessonskeny amigableNo ratings yet
- Report SeminarDocument23 pagesReport SeminarpradnyaekadNo ratings yet
- FME 326 Module 1Document9 pagesFME 326 Module 1Jesse Jon FerolinoNo ratings yet
- Prelim-MODULE 2Document14 pagesPrelim-MODULE 2Celimen, John Renz C.No ratings yet
- Feedback Control System: Output - Desired OutputDocument13 pagesFeedback Control System: Output - Desired OutputApril BalceNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Control Systems - LECTURE NOTESDocument132 pagesControl Systems - LECTURE NOTESgutha manikantaNo ratings yet
- Control Systems Engineering 5 (1) - 2Document1 pageControl Systems Engineering 5 (1) - 2ANo ratings yet
- Control Systems Engineering 5Document5 pagesControl Systems Engineering 5ANo ratings yet
- LabExercise 9 - Dynamic Systems SimulationDocument16 pagesLabExercise 9 - Dynamic Systems SimulationQueenie Rose PercilNo ratings yet
- Feedback and Control Systems: Engr. Joey P. Sarmiento, PECEDocument160 pagesFeedback and Control Systems: Engr. Joey P. Sarmiento, PECERAINIER RamosNo ratings yet
- ECE 414 Module1 RamosAira 2021Document7 pagesECE 414 Module1 RamosAira 202113.allenmark.31No ratings yet
- Marlin Ch13Document44 pagesMarlin Ch13Ashwin Kumar SabatNo ratings yet
- Control System Engineering (15A02303) : Lecture Note B.TechDocument126 pagesControl System Engineering (15A02303) : Lecture Note B.TechNAZMUS SAKIBNo ratings yet
- Principles of Automatic ControlDocument26 pagesPrinciples of Automatic ControlMesut OzilNo ratings yet
- Unit 1: Control System Module: 1.0 Intended Learning OutcomesDocument7 pagesUnit 1: Control System Module: 1.0 Intended Learning OutcomesNeans PlanterasNo ratings yet
- Control Engineering & Instrumentation Assignment # 01 Submitted By: Syed Hamza Zulfiqar Reg # 620/BSME/f16 (B)Document12 pagesControl Engineering & Instrumentation Assignment # 01 Submitted By: Syed Hamza Zulfiqar Reg # 620/BSME/f16 (B)Hamza zulfiqarNo ratings yet
- Control Systems Engineering: January 2010Document22 pagesControl Systems Engineering: January 2010Kanugolu Bala Ananth SaiNo ratings yet
- Control System 1Document29 pagesControl System 1Gabriel GalizaNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- LESSON1 IntroToControlSystemDocument10 pagesLESSON1 IntroToControlSystemalexancog456No ratings yet
- BIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSDocument15 pagesBIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSNoor AhmedNo ratings yet
- Watt's Speed Governor ForDocument18 pagesWatt's Speed Governor ForMuhammad Tayyab YousafzaiNo ratings yet
- Control Systems Engineering: January 2010Document22 pagesControl Systems Engineering: January 2010khacsau2904No ratings yet
- FeedbackDocument43 pagesFeedbackJanmarc CorpuzNo ratings yet
- Free Study Materials & Career Guidance for Engineers, Doctors & MoreDocument124 pagesFree Study Materials & Career Guidance for Engineers, Doctors & MoreaduveyNo ratings yet
- Dept. of EEE, Prime UniversityDocument16 pagesDept. of EEE, Prime UniversityMD Rakib SHordorNo ratings yet
- Introduction PDFDocument7 pagesIntroduction PDFSandeep B RNo ratings yet
- Lecture Notes NewDocument76 pagesLecture Notes NewBethany LerewanuNo ratings yet
- Chapter 1: Introduction: Subject: Control PrinciplesDocument5 pagesChapter 1: Introduction: Subject: Control PrinciplesRonaldo KmeNo ratings yet
- EE131 Comprehensive Exam 2nd Sem 2019-2020 - BaronDocument11 pagesEE131 Comprehensive Exam 2nd Sem 2019-2020 - BaronRosendo J. BaronNo ratings yet
- CST 04Document95 pagesCST 04Sourav ChoubeyNo ratings yet
- Sampling in Closed Loop Control Systems: 6.1 Digital Control and Optimal Signal ReconstructionDocument24 pagesSampling in Closed Loop Control Systems: 6.1 Digital Control and Optimal Signal ReconstructionAyad M Al-AwsiNo ratings yet
- Thermostat Theory of Project ControlDocument10 pagesThermostat Theory of Project ControlJulius Chavene0% (1)
- 01-Introduction To Control SystemsDocument14 pages01-Introduction To Control SystemsAhmed JouleNo ratings yet
- Figure 1 Process Under ControlDocument9 pagesFigure 1 Process Under ControlKajalNo ratings yet
- Control Theory Notes PDFDocument212 pagesControl Theory Notes PDFAmrik SinghNo ratings yet
- Chapter 1 IntroductionDocument68 pagesChapter 1 IntroductionNtiyisoColbertNo ratings yet
- Control Systems NotesDocument74 pagesControl Systems NotesNirjal RanipaNo ratings yet
- Chap 1Document22 pagesChap 1Marianah MasrieNo ratings yet
- Control System Engineering - IDocument212 pagesControl System Engineering - IAjit Kumar Kisku100% (1)
- Ipc PPT 7thDocument25 pagesIpc PPT 7thChemical engrNo ratings yet
- Control Systems CH1Document12 pagesControl Systems CH1kkefeingeNo ratings yet
- Mechatronics Assignment - 1Document6 pagesMechatronics Assignment - 1SARTHAK JAINNo ratings yet
- ME4120 Assessment 1Document3 pagesME4120 Assessment 1Janlyn OrnosNo ratings yet
- Swami Karunamoorthy - Control Systems (Modeling, Analysis and Design) - Cognella (2020)Document192 pagesSwami Karunamoorthy - Control Systems (Modeling, Analysis and Design) - Cognella (2020)Gulrez M100% (1)
- 11 Conclusions: ConclusionDocument1 page11 Conclusions: Conclusiondai83No ratings yet
- Control Systems Typed NotesDocument129 pagesControl Systems Typed Notesta003744No ratings yet
- 3 - Open and Closed Loop SystemDocument15 pages3 - Open and Closed Loop SystemKenzie WalipiNo ratings yet
- Topic 1. Introduction To Control Systems DesignDocument14 pagesTopic 1. Introduction To Control Systems DesignxREDCivicCometxNo ratings yet
- AR - Module-1 Q & A (SEE)Document8 pagesAR - Module-1 Q & A (SEE)Simply AkashNo ratings yet
- Wireless Sensor Network Security A Critical Literature ReviewDocument4 pagesWireless Sensor Network Security A Critical Literature Reviewea6xrjc4No ratings yet
- UMN EE 1301 Sample Problems and Solutions for Quiz 1Document14 pagesUMN EE 1301 Sample Problems and Solutions for Quiz 1ganxx019No ratings yet
- Unit 4 (C)Document19 pagesUnit 4 (C)dharmeshNo ratings yet
- Ten-Tec Model 1253 Regenerative Radio KitDocument3 pagesTen-Tec Model 1253 Regenerative Radio KitAteneuNo ratings yet
- Job Aplication LetterDocument4 pagesJob Aplication LetterFebiola PurnamasariNo ratings yet
- Q3876 Common Questions About ActiveX Controls in CitectSCADADocument5 pagesQ3876 Common Questions About ActiveX Controls in CitectSCADAdesrico20039088No ratings yet
- FCO560 Users Guide Issue 2aDocument63 pagesFCO560 Users Guide Issue 2aJames Mason100% (1)
- SM - Project Report - Group-11Document15 pagesSM - Project Report - Group-110463SanjanaNo ratings yet
- Diagrama y Manual de Servicio Genius - swn51 - 1000Document18 pagesDiagrama y Manual de Servicio Genius - swn51 - 1000Asmeri RuizNo ratings yet
- Ultramatch Pro Src2496: User ManualDocument16 pagesUltramatch Pro Src2496: User ManualLuka TrengovskiNo ratings yet
- Ip Half Yearly Exam 1 - 2022Document7 pagesIp Half Yearly Exam 1 - 2022Ayushmaan MaithaniNo ratings yet
- Harmonic Patterns: Guides To Profitable TradingDocument7 pagesHarmonic Patterns: Guides To Profitable TradingalokNo ratings yet
- Role of Print Media in AdvertisementDocument14 pagesRole of Print Media in AdvertisementMoond0070% (1)
- 55174A92 QS II Basic Model With ADSU (Diktron) User Manual ENDocument28 pages55174A92 QS II Basic Model With ADSU (Diktron) User Manual ENSorin MilicaNo ratings yet
- Myon Parent GuideDocument13 pagesMyon Parent Guideapi-527646442No ratings yet
- Lufthansa Technical Training Troubleshooting Fundamentals CourseDocument160 pagesLufthansa Technical Training Troubleshooting Fundamentals CourseBELISARIONo ratings yet
- Guidelines For Safety in E O T Cranes: IPSS: 2-02-007-18 (First Revision)Document4 pagesGuidelines For Safety in E O T Cranes: IPSS: 2-02-007-18 (First Revision)Mohammad Safdar SadatNo ratings yet
- Photoshop ElementsDocument341 pagesPhotoshop ElementskathaerinNo ratings yet
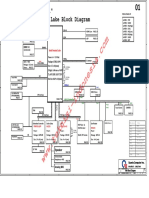
- Intel Gemini Lake Block Diagram EJ-11 ZHE 11"Document37 pagesIntel Gemini Lake Block Diagram EJ-11 ZHE 11"Tomy Aditya PratamaNo ratings yet
- BS en 12953-12-2003Document22 pagesBS en 12953-12-2003Tuấn ChuNo ratings yet
- Mycroft (Software)Document5 pagesMycroft (Software)sophia787No ratings yet
- Find the Best Travel Package with a Single ClickDocument101 pagesFind the Best Travel Package with a Single ClickPallavi PalluNo ratings yet
- B. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Document73 pagesB. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Sushant5inghrajputNo ratings yet
- CIE 121 Fluid Flow Using BEE and CEDocument2 pagesCIE 121 Fluid Flow Using BEE and CEfelixterence5No ratings yet
- RPT InventoryDocument74 pagesRPT InventoryISAM AHMEDNo ratings yet
- Eduwork: Free Class Web ProgrammingDocument53 pagesEduwork: Free Class Web ProgrammingAgnesNo ratings yet
- Networks Pre Connection Attacks PDFDocument15 pagesNetworks Pre Connection Attacks PDFaniket kasturiNo ratings yet
- 8051 Atmel DatasheetDocument12 pages8051 Atmel Datasheetpranav_c22100% (3)
- Test and MeasurementDocument23 pagesTest and Measurementcloudprintsph13No ratings yet
- MKT V-5esc Installation GuideDocument31 pagesMKT V-5esc Installation GuidePrudzNo ratings yet