You might also like
- Dynamic Analysisof Thin Glassunder Ball Drop Impactwith New MetricsDocument9 pagesDynamic Analysisof Thin Glassunder Ball Drop Impactwith New MetricsRichard OchotorenaNo ratings yet
- Inkjet Printing-Process and Its ApplicationsDocument13 pagesInkjet Printing-Process and Its ApplicationsShohel AhmedNo ratings yet
- Analysis of Contact Stresses in Spur Gears by Finite Element MethodDocument8 pagesAnalysis of Contact Stresses in Spur Gears by Finite Element MethodgarciarodrigoNo ratings yet
- FatigueFailureAnalysisofCrankshafts AreviewDocument15 pagesFatigueFailureAnalysisofCrankshafts Areviewtugas beresNo ratings yet
- Standard 1536Document8 pagesStandard 1536Jesus LopezNo ratings yet
- Self Assembled Monolayer ThesisDocument5 pagesSelf Assembled Monolayer ThesisCustomPapersOnlineCanada100% (2)
- Factorial Analysis of Variables Affecting Bone Stress Adjacent To The Orthodontic Anchorage Mini-Implant With Finite Element AnalysisDocument8 pagesFactorial Analysis of Variables Affecting Bone Stress Adjacent To The Orthodontic Anchorage Mini-Implant With Finite Element AnalysisYeraldin EspañaNo ratings yet
- Sariman 2019 IOP Conf. Ser. Earth Environ. Sci. 343 012165Document7 pagesSariman 2019 IOP Conf. Ser. Earth Environ. Sci. 343 012165WR ciptoNo ratings yet
- SenthilnatDocument12 pagesSenthilnatm2010008No ratings yet
- Influência Do Tipo de Rosca No Torque de Remoção Dos Mini-Implantes - HongDocument8 pagesInfluência Do Tipo de Rosca No Torque de Remoção Dos Mini-Implantes - HongUrsula Pantigozo MoránNo ratings yet
- Experimental Investigation On Dynamic Response ofDocument12 pagesExperimental Investigation On Dynamic Response ofsenthilNo ratings yet
- Punurai Et Al (2019) Stochastic Optimization PDFDocument19 pagesPunurai Et Al (2019) Stochastic Optimization PDFwonsiriNo ratings yet
- Mansur 2016 IOP Conf. Ser. Mater. Sci. Eng. 105 012033Document10 pagesMansur 2016 IOP Conf. Ser. Mater. Sci. Eng. 105 012033Fahmi MatarangNo ratings yet
- Quantity Assessment of Plastic Deformation Energy Under ImpactDocument9 pagesQuantity Assessment of Plastic Deformation Energy Under ImpactAndres Felipe CaballeroNo ratings yet
- 2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFDocument7 pages2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFzebrazerozeroNo ratings yet
- Research On Bird Strike Simulation of Composite Leading EdgeDocument6 pagesResearch On Bird Strike Simulation of Composite Leading EdgeSharan KharthikNo ratings yet
- Bat Detection and Shutdown System For Utility-Scale Wind Turbines-2017Document98 pagesBat Detection and Shutdown System For Utility-Scale Wind Turbines-2017MarthaNo ratings yet
- A I in Renewable EnergyDocument12 pagesA I in Renewable Energybobabeari989No ratings yet
- Oprişan 2016 IOP Conf. Ser.: Mater. Sci. Eng. 147 012058Document10 pagesOprişan 2016 IOP Conf. Ser.: Mater. Sci. Eng. 147 012058Kyle N SamarooNo ratings yet
- Effect of Crack On Bending Process For S55c CarbonDocument17 pagesEffect of Crack On Bending Process For S55c CarbonGustavo BalderramasNo ratings yet
- Design and Fabrication of Fatigue Test Rig For Composite Leaf SpringDocument12 pagesDesign and Fabrication of Fatigue Test Rig For Composite Leaf SpringIJRASETPublicationsNo ratings yet
- Paper IIDocument44 pagesPaper IIThejaswiniNo ratings yet
- A Multiscale Modeling Approach To Crack Initiation in Aluminum PolycrystalsDocument8 pagesA Multiscale Modeling Approach To Crack Initiation in Aluminum Polycrystals1584706055No ratings yet
- Experimental Investigation of Interference Fit Connection of Mechanical ComponentsDocument6 pagesExperimental Investigation of Interference Fit Connection of Mechanical ComponentsOusq HamNo ratings yet
- Fatihhi Januddi, Muhamad Noor Harun, Ardiyansyah Syahrom, Adnan Bakri, M. F. M. AlkbirDocument11 pagesFatihhi Januddi, Muhamad Noor Harun, Ardiyansyah Syahrom, Adnan Bakri, M. F. M. AlkbirDicky Pratama PutraNo ratings yet
- Water Purification and Disinfection by Using Solar Energy: Towards Green Energy ChallengeDocument9 pagesWater Purification and Disinfection by Using Solar Energy: Towards Green Energy ChallengeMadelaineNo ratings yet
- Esec 235640005Document19 pagesEsec 235640005Alex HernandezNo ratings yet
- Experimental and Numerical Analysis of Pinned Composites For Stacking Sequence EffectDocument16 pagesExperimental and Numerical Analysis of Pinned Composites For Stacking Sequence EffectFARUK ELALDINo ratings yet
- 3 Point BendingDocument10 pages3 Point BendingHuy D NguyenNo ratings yet
- Fadiga PilotoDocument11 pagesFadiga PilotoAllancardi dos Santos SiqueiraNo ratings yet
- Fabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmDocument3 pagesFabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmMrinmayee ThakurNo ratings yet
- Pag21 - ImapctoDocument44 pagesPag21 - ImapctodanielNo ratings yet
- Adaptive Capability Assessment of A Process in Cable Manufacturing: A Case StudyDocument9 pagesAdaptive Capability Assessment of A Process in Cable Manufacturing: A Case StudySyed HasanNo ratings yet
- Fyp1 Progress ReportDocument46 pagesFyp1 Progress ReportZhelius ZapplinNo ratings yet
- Indonesian Journal of Science & TechnologyDocument10 pagesIndonesian Journal of Science & Technologyfakihilham2705No ratings yet
- Mechanical and Biological StabilityDocument20 pagesMechanical and Biological StabilityDental Del NorteNo ratings yet
- Quantum Machine LearningDocument34 pagesQuantum Machine LearningBeatriz IzquierdoNo ratings yet
- Friction and Dry Sliding Wear Behavior of Red MudDocument13 pagesFriction and Dry Sliding Wear Behavior of Red Mudhazem.ahmed01No ratings yet
- Experimental Studies On Effect of Stiffener Configuration On Compressive Strength of Stiffened PanelsDocument10 pagesExperimental Studies On Effect of Stiffener Configuration On Compressive Strength of Stiffened PanelsTJPRC PublicationsNo ratings yet
- Dental Force Measurement Using Peizoelectric SensorsDocument6 pagesDental Force Measurement Using Peizoelectric SensorsIJRASETPublicationsNo ratings yet
- Abbas 2018 IOP Conf. Ser.3A Mater. Sci. Eng. 454 012025Document11 pagesAbbas 2018 IOP Conf. Ser.3A Mater. Sci. Eng. 454 012025ksysbaysyagNo ratings yet
- Simulation-1251112-Attached File-82356777Document10 pagesSimulation-1251112-Attached File-82356777alfredolfosterNo ratings yet
- Delamination of Buckling of BeamDocument13 pagesDelamination of Buckling of BeamHIMANSHU KUMARNo ratings yet
- A - Nahm27,+z+709 2327 2 EDDocument9 pagesA - Nahm27,+z+709 2327 2 EDAndi AdityaNo ratings yet
- MeasurementDocument34 pagesMeasurementAlijean VenturaNo ratings yet
- Leatracher RivewDocument11 pagesLeatracher Rivewabuki bekriNo ratings yet
- Network Projects Research: Chuan LiuDocument17 pagesNetwork Projects Research: Chuan LiuBhuvaneshwariNo ratings yet
- Journal of King Saud University - ScienceDocument18 pagesJournal of King Saud University - ScienceMhd Refsi Oktafian 1607116138No ratings yet
- International Journal of Impact Engineering: Yong Peng, Jikuang Yang, Caroline Deck, Remy WillingerDocument9 pagesInternational Journal of Impact Engineering: Yong Peng, Jikuang Yang, Caroline Deck, Remy WillingerEnd_06No ratings yet
- Improved Prediction of Wind Speed Using Machine Learning: Journal of Physics: Conference SeriesDocument6 pagesImproved Prediction of Wind Speed Using Machine Learning: Journal of Physics: Conference SeriesSAM K MATHEWNo ratings yet
- Evaluation of A Sensor For Low Interface Pressure ApplicationDocument8 pagesEvaluation of A Sensor For Low Interface Pressure ApplicationSaurabh ThakurNo ratings yet
- Occupational Safety and Health) in 2010 in The United States Showed That MortalityDocument12 pagesOccupational Safety and Health) in 2010 in The United States Showed That MortalityWulanNovrytaNo ratings yet
- Slope Stability Analyses at Agumbe Ghat Section NH-169ADocument10 pagesSlope Stability Analyses at Agumbe Ghat Section NH-169Ameghshyam maratheNo ratings yet
- Dynamic Failure Analysisof Ship Energy SystemsDocument11 pagesDynamic Failure Analysisof Ship Energy SystemsDAN CHAMZNo ratings yet
- Epitome December 2020Document15 pagesEpitome December 2020Dhinesh KalaimaranNo ratings yet
- AzdezDocument10 pagesAzdezEren KalayNo ratings yet
- Comparison of The Approximate and Exact Second Order Elastic Analysis Methods In, Seblework Hailu PDFDocument70 pagesComparison of The Approximate and Exact Second Order Elastic Analysis Methods In, Seblework Hailu PDFsirakNo ratings yet
- Analysis of Single Plate Friction Clutch Using Finite Element MethodDocument4 pagesAnalysis of Single Plate Friction Clutch Using Finite Element MethodIJASRETNo ratings yet
- AFinite Element Analysisof Automobile Leaf SpringDocument13 pagesAFinite Element Analysisof Automobile Leaf SpringTirth ShethNo ratings yet
- The Science of Superhydrophobicity: Enhancing Outdoor Electrical InsulatorsFrom EverandThe Science of Superhydrophobicity: Enhancing Outdoor Electrical InsulatorsNo ratings yet
- Lecture 1Document23 pagesLecture 1Eslam SamirNo ratings yet
- Geocell As A Promising Reinforcement Technique For Road Pavement: A State of The ArtDocument23 pagesGeocell As A Promising Reinforcement Technique For Road Pavement: A State of The ArtEslam SamirNo ratings yet
- All Sheets-Method3Document8 pagesAll Sheets-Method3Eslam SamirNo ratings yet
- Quantitative Extraction of Bitumen From Bituminous Paving MixturesDocument13 pagesQuantitative Extraction of Bitumen From Bituminous Paving MixturesEslam SamirNo ratings yet
- Identification of Elastic Response of Asphalt PaveDocument13 pagesIdentification of Elastic Response of Asphalt PaveEslam SamirNo ratings yet
- Akinshipe2021 Chapter TransformingQuantitySurveyingFDocument12 pagesAkinshipe2021 Chapter TransformingQuantitySurveyingFEslam SamirNo ratings yet
- CB 523-Method I - DR Elsayed - LectDocument31 pagesCB 523-Method I - DR Elsayed - LectEslam SamirNo ratings yet
- Article RachidDocument20 pagesArticle RachidEslam SamirNo ratings yet
- A Brief Overview of Damage Plastic Model and DamagDocument7 pagesA Brief Overview of Damage Plastic Model and DamagEslam SamirNo ratings yet
- Overtime Hours in Quantity Surveying Consultant Firms in MalaysiaDocument14 pagesOvertime Hours in Quantity Surveying Consultant Firms in MalaysiaEslam SamirNo ratings yet
- 2021-December 28 - (12th-Exam) - CB532Document1 page2021-December 28 - (12th-Exam) - CB532Eslam SamirNo ratings yet
- TS02B Evans Barbrook Et Al 11519 AbsDocument3 pagesTS02B Evans Barbrook Et Al 11519 AbsEslam SamirNo ratings yet
- ICTKE2011 Paper ID76 Tan Chin Keng Yeoh Kah ChingDocument7 pagesICTKE2011 Paper ID76 Tan Chin Keng Yeoh Kah ChingEslam SamirNo ratings yet
- CB532 - Sheet 3Document1 pageCB532 - Sheet 3Eslam SamirNo ratings yet
- Russia PaperDocument7 pagesRussia PaperEslam SamirNo ratings yet
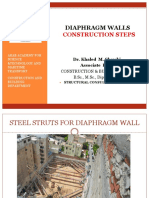
- Diaphragm WaalDocument33 pagesDiaphragm WaalEslam SamirNo ratings yet
- CB532 - Sheet 4Document1 pageCB532 - Sheet 4Eslam SamirNo ratings yet
- CRANESDocument23 pagesCRANESEslam SamirNo ratings yet
- Ccto Anamitra3Document13 pagesCcto Anamitra3Jhasaketan NayakNo ratings yet
- Amsbeck MT - Fliehkraftbremsen - EngDocument12 pagesAmsbeck MT - Fliehkraftbremsen - EngHenrique MarquesNo ratings yet
- Air Cooled Scroll Chiller Start-Up ReportDocument4 pagesAir Cooled Scroll Chiller Start-Up ReportAguzmuhhamadd Pecinthamusicksejathiand ThevikingspersibzNo ratings yet
- All India Integrated Test Series: JEE (Advanced) - 2022Document13 pagesAll India Integrated Test Series: JEE (Advanced) - 2022Tanay KakliyaNo ratings yet
- Triboelectric Series 1Document2 pagesTriboelectric Series 1Rajendra BisoiNo ratings yet
- Universe Qs Consol 2Document5 pagesUniverse Qs Consol 2Hrisheeta DasNo ratings yet
- Is 8383 (2000)Document9 pagesIs 8383 (2000)Ravichandran DNo ratings yet
- Analysis of Self Supporting Steel Chimney: MR - Praveen Kumar, DR - Ajay SwarupDocument7 pagesAnalysis of Self Supporting Steel Chimney: MR - Praveen Kumar, DR - Ajay SwarupGeorge Laurentiu IonicăNo ratings yet
- Engineering Mechanics 1 Practice ExamDocument4 pagesEngineering Mechanics 1 Practice ExamBatalla, Frencee Shine A.No ratings yet
- Karl's Study Guide For PhysicsDocument79 pagesKarl's Study Guide For PhysicsDeepika DevarajNo ratings yet
- Some Basic Concept of Chemistry - DPP 01 (Of Lec-02) - Arjuna NEET 2024Document3 pagesSome Basic Concept of Chemistry - DPP 01 (Of Lec-02) - Arjuna NEET 2024Wind Follower MusicNo ratings yet
- CHONG Alecs KT - PHD ThesisDocument369 pagesCHONG Alecs KT - PHD ThesisaktcNo ratings yet
- Ti Vestenamer Waste Rubber RecyclingDocument4 pagesTi Vestenamer Waste Rubber Recyclingshalinda Anup RitigahapolaNo ratings yet
- Sif Tig BrazingDocument1 pageSif Tig BrazingJeremy PhilipNo ratings yet
- 1A27 AerosolDocument2 pages1A27 AerosolsaddlemanNo ratings yet
- Belimo Room-And-Zone-Control CR24 Application Brochure En-GbDocument24 pagesBelimo Room-And-Zone-Control CR24 Application Brochure En-GbLaurentiu LapusescuNo ratings yet
- Sandwich Design and TheoryDocument46 pagesSandwich Design and Theoryramyasweety1100% (1)
- B1 Distrubutory DesignDocument17 pagesB1 Distrubutory DesignNeil AgshikarNo ratings yet
- MunzkyDocument11 pagesMunzkyMouhab HassanNo ratings yet
- Air-Entraining Admixtures For Concrete 11Document60 pagesAir-Entraining Admixtures For Concrete 11qaisalkurdyNo ratings yet
- SKF FA Question 2Document5 pagesSKF FA Question 2Nisha Lauren VishvanathNo ratings yet
- h06961 Accu PulseDocument1 pageh06961 Accu PulsekirankirkNo ratings yet
- (K. Alex Muller) Properties of Perovskites and Oth (BookFi)Document583 pages(K. Alex Muller) Properties of Perovskites and Oth (BookFi)ocean.deepblue765No ratings yet
- Sp-2 Class Xi Level IIIDocument105 pagesSp-2 Class Xi Level IIIDHOLA VRAJ RAMESHBHAINo ratings yet
- Paper1 2000Document13 pagesPaper1 2000Lawrence Lim Ah KowNo ratings yet
- Quiz RemedialDocument1 pageQuiz RemedialAnaveille B. CancioNo ratings yet
- MachineryFaultsDiagnosis Poster Redesign enDocument1 pageMachineryFaultsDiagnosis Poster Redesign enlucascpizzettiNo ratings yet
- Structure of The Earth and CompositionDocument12 pagesStructure of The Earth and CompositionFay Valerio AlabaNo ratings yet
- Mechanical Equipment: Norsok StandardDocument42 pagesMechanical Equipment: Norsok StandardGholamreza MahmoodiNo ratings yet