You might also like
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomeNo ratings yet
- Ame 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMDocument7 pagesAme 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMCeline Kate BentayaoNo ratings yet
- Speed Control of DC Motor by Armature Resistance ControlDocument8 pagesSpeed Control of DC Motor by Armature Resistance ControlKosigar ChelladoraiNo ratings yet
- Speed Control of DC Shunt MotorDocument7 pagesSpeed Control of DC Shunt MotorAakash0% (1)
- Speed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlDocument8 pagesSpeed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlAkshit VSNo ratings yet
- EET 421 POWER ELECTRONIC DRIVESDocument48 pagesEET 421 POWER ELECTRONIC DRIVESaswardi8756No ratings yet
- DC Motor Speed Control Lab ExperimentsDocument124 pagesDC Motor Speed Control Lab ExperimentspurushothNo ratings yet
- DC & AC Drives: Speed Control MethodsDocument12 pagesDC & AC Drives: Speed Control MethodsPKNo ratings yet
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Original Exp 1 2Document8 pagesOriginal Exp 1 2Kushal SharmaNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- RBT Lab Manuval 11E608 CEDocument106 pagesRBT Lab Manuval 11E608 CEnandhakumarmeNo ratings yet
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Document8 pagesAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolNo ratings yet
- DC Motor DrivesDocument39 pagesDC Motor DrivesAnuar Nuafzan100% (1)
- EECT Experiment 8 Report (Manika Jain 2K19-EE-151)Document5 pagesEECT Experiment 8 Report (Manika Jain 2K19-EE-151)2K19/EE/151 MANIKA JAINNo ratings yet
- Speed Control Methods of DC MotorDocument6 pagesSpeed Control Methods of DC MotorMohd Izzat Abd GhaniNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- Suraj GahalyanDocument6 pagesSuraj GahalyanSuraj GahalyanNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- DC Series Motor Speed ControlDocument38 pagesDC Series Motor Speed Controllakha ramNo ratings yet
- Eee206 DC Motor p1bDocument3 pagesEee206 DC Motor p1bAhad AhadNo ratings yet
- Direct Current Motor: UNIT-9Document19 pagesDirect Current Motor: UNIT-9Keshav RathiNo ratings yet
- Speed Control and Starting of A DC MotorDocument56 pagesSpeed Control and Starting of A DC MotorCarlos Arias LuyandoNo ratings yet
- Speed Control of DC MotorDocument15 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- DC Drives PDFDocument90 pagesDC Drives PDFkeerthi50% (2)
- DC Motors: Characteristics, Control, ApplicationsDocument16 pagesDC Motors: Characteristics, Control, ApplicationsBelayet RonyNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- Lab 3 - DC Motor Speed Control (MANUAL)Document6 pagesLab 3 - DC Motor Speed Control (MANUAL)kimiNo ratings yet
- DC Shunt Motor Speed Control by Field & Armature MethodsDocument4 pagesDC Shunt Motor Speed Control by Field & Armature MethodsVaibhavNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- DC Ep 6Document8 pagesDC Ep 6Barham Omer HamadNo ratings yet
- Speed Control of DC Shunt MotorDocument2 pagesSpeed Control of DC Shunt Motoraditya aryaNo ratings yet
- Expt No 4Document6 pagesExpt No 4abheetpethe.scoe.entcNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Lecture DC MachinesDocument40 pagesLecture DC MachinesgeslincarlombetahNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- ALTERNATOR PARTII Edit2023Document15 pagesALTERNATOR PARTII Edit2023Kevin MaramagNo ratings yet
- Electrical Machines Lab 1 Electrical MacDocument153 pagesElectrical Machines Lab 1 Electrical MacOladimeji OluwaseunNo ratings yet
- DC Motor Drives (Compatibility Mode)Document63 pagesDC Motor Drives (Compatibility Mode)Anuar NuafzanNo ratings yet
- Machine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicDocument14 pagesMachine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicKartheepan KaNo ratings yet
- Servo MOTORDocument5 pagesServo MOTORLal Chand PooniaNo ratings yet
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniNo ratings yet
- Manual Ee IVDocument56 pagesManual Ee IVAkhilesh Kumar MishraNo ratings yet
- Experiment No. 3 Transfer Function of Two Phase A. C. Servo MotorDocument3 pagesExperiment No. 3 Transfer Function of Two Phase A. C. Servo MotorSHIVAM KUMAR SINGHWALNo ratings yet
- Scalar Control of Ac DrivesDocument38 pagesScalar Control of Ac Drivessureshy-ee213No ratings yet
- Ec-I Lab MannualDocument30 pagesEc-I Lab Mannualsmaran247017No ratings yet
- Experiment No.2: Operation of D.C Motors, Running and ReversingDocument10 pagesExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNo ratings yet
- Steady-State Analysis of DC MotorsDocument24 pagesSteady-State Analysis of DC MotorsUsama RaoNo ratings yet
- Determination of Transformer Parameters from Open Circuit TestDocument7 pagesDetermination of Transformer Parameters from Open Circuit TestSur ShriNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- DC Motor Characteristics InvestigationDocument7 pagesDC Motor Characteristics InvestigationAhmar KhanNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Nuclear & Particle PhysicsDocument37 pagesNuclear & Particle PhysicsVishal TanwarNo ratings yet
- Hiranandani Foundation School, Powai Std. X Subject: Geography (H.C.G. Paper 2) Semester II Worksheet - 1Document2 pagesHiranandani Foundation School, Powai Std. X Subject: Geography (H.C.G. Paper 2) Semester II Worksheet - 1richman77No ratings yet
- TSD - GHG Mitigation Measures For Combustion TurbinesDocument30 pagesTSD - GHG Mitigation Measures For Combustion TurbinesMuhammad Redzwan Bin IsmailNo ratings yet
- Connections and Composition of LV, MV, HV Capacitor BanksDocument7 pagesConnections and Composition of LV, MV, HV Capacitor BanksAbdul Mohid SheikhNo ratings yet
- Jt8D Maintenance Advisory Notice: NO. MAN-JT8D-1-06 TYPE: On-Wing ATA: 72-50-00Document25 pagesJt8D Maintenance Advisory Notice: NO. MAN-JT8D-1-06 TYPE: On-Wing ATA: 72-50-00amir ghaznaviNo ratings yet
- Solar Powered Intelligent Car Cabin Ventilation System - OkDocument16 pagesSolar Powered Intelligent Car Cabin Ventilation System - Okkrushna NikamNo ratings yet
- Trouble Codes Toyota CorollaDocument2 pagesTrouble Codes Toyota CorollaAdrian Fernandez0% (1)
- En CatalogoDocument394 pagesEn Catalogowycka wiciokasNo ratings yet
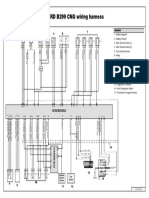
- M Ford B299 VPVehicle w-8 enDocument1 pageM Ford B299 VPVehicle w-8 enOmar Enrique ContrerasNo ratings yet
- Work order management reportsDocument122 pagesWork order management reportsaron james empigNo ratings yet
- Service Manual: Tigercat T240B Track LoaderDocument126 pagesService Manual: Tigercat T240B Track Loadertystar_21No ratings yet
- What A Russian Invasion Would Mean For Energy MarketsDocument4 pagesWhat A Russian Invasion Would Mean For Energy MarketsGeovani Hernández MartínezNo ratings yet
- Marine Pump Instruction ManualDocument4 pagesMarine Pump Instruction ManualSvetoslav Stoimenov100% (1)
- 1 - REV Method Statement For Generator SetDocument13 pages1 - REV Method Statement For Generator SetAyda JohariNo ratings yet
- VFD Maintenance Tips: Restarting Your Electrical Equipment After A Long ShutdownDocument3 pagesVFD Maintenance Tips: Restarting Your Electrical Equipment After A Long Shutdownashumishra007No ratings yet
- Ni02 (PP254)Document303 pagesNi02 (PP254)desetekNo ratings yet
- Rs Elizabeth Purwokerto Ahu 1 Dm2 0407bDocument6 pagesRs Elizabeth Purwokerto Ahu 1 Dm2 0407bMuhamad RivalNo ratings yet
- Tentative Costing - 132kV - 1KMDocument4 pagesTentative Costing - 132kV - 1KManuragtiwari762No ratings yet
- SH210-6/SH210LC-6: Service ManualDocument68 pagesSH210-6/SH210LC-6: Service ManualFris Ainur100% (2)
- Development - Subsea Achitecture - Project 2023 V01Document153 pagesDevelopment - Subsea Achitecture - Project 2023 V01LUCAS ANDRES MIRANDA PINTONo ratings yet
- Esquema Eletrico Geral Pc200-8Document3 pagesEsquema Eletrico Geral Pc200-8Egon HenriqueNo ratings yet
- Installation and Operation Instruction: Flowcon Green 15-40 MM (1/2"-1 1/2")Document2 pagesInstallation and Operation Instruction: Flowcon Green 15-40 MM (1/2"-1 1/2")Gabriel Arriagada UsachNo ratings yet
- GES 21 SpecDocument7 pagesGES 21 SpecBrillyanNo ratings yet
- Decision 262 PM PDP8 _ En224Document3 pagesDecision 262 PM PDP8 _ En224maitran.bizNo ratings yet
- HD Válvulas On-OffDocument1 pageHD Válvulas On-Offcristian W. saravia vegaNo ratings yet
- Sun Shading DevicesDocument4 pagesSun Shading DevicesjabezNo ratings yet
- High Voltage - WikipediaDocument47 pagesHigh Voltage - WikipediaDamilare Daniel OlaniyiNo ratings yet
- TD029 MD6540C DS400102Document1,409 pagesTD029 MD6540C DS400102Martin Polar Rodriguez100% (1)
- Management of Energy Usage in A Supermarket Refrigeration SystemsDocument8 pagesManagement of Energy Usage in A Supermarket Refrigeration SystemsDraganNo ratings yet
- Bfji SummaryDocument1 pageBfji Summarysaffririzal4237No ratings yet