Professional Documents
Culture Documents
Lek13 Rekurzija
Uploaded by
まりなのちkiflaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Lek13 Rekurzija
Uploaded by
まりなのちkiflaCopyright:
Available Formats
13.
Rekurzija i složenost algoritama
13.1 Rekurzija u programiranju
U programiranju rekurzija nastaje kada funkcija poziva samu sebe direktno ili indirektno. Indirektna
rekurzija nastaje kada jedna funkcija poziva drugu funkciju, iz koje se ponovo poziva pozivna
funkcija.
U matematici se često proračun neke funkcije f(n) definira pomoću rekurzije. Koristi se pravilo:
1. postavi f(0) "temeljni slučaj"
2. računaj f(n) pomoću f(k) za k < n "pravilo rekurzije"
Primjerice, rekurzivno se može izračunati n! (n-faktorijela), jer vrijedi
za n=0: 0! = 1; (temeljno rekurzije)
za n>0: n! = n * (n-1)! (rekurzivno pravilo)
pa se sve vrijednosti mogu izračunatu pomoću gornjeg rekurzivnog pravila:
1! = 1 * 0! = 1
2! = 2 * 1! = 2
3! = 3 * 2! = 6 ... itd.
Ovo razmatranje zaključujemo rekurzivnom definicijom funkcije za proračun n!:
int factorial(int n)
{
if (n == 0)
return 1;
else
return factorial(n-1) * n;
}
Rekurzija je korisna u mnogim slučajevima, posebno kada je njome prirodno definiran problem.
13.2 Matematička indukcija
Rekurzivni način obrade problema često se koristi pri dokazivanju teorema pomoću matematičke
indukcije. Matematička indukcija se koristi kod problema čije se stanje S(n) može opisati cijelim
brojem n, a definira se na sljedeći način
Da bi dokazali da vrijedi zakonitost S(n):
1. dokaži zakonitost trivijalnog slučaja S(0)
2. zatim dokaži da vrijedi S(n), ako se pretpostavi da vrijedi S(n-1).
Primjer: dokazat ćemo da se suma od n prirodnih brojeva može računati prema izrazu:
1 + 2 + 3 + … + n = n (n +1) / 2
Dokaz:
1. Trivijalni slučaj za n = 1, ( 1(1+1)/2)=1 OK!)
2. Pretpostavimo da vrijedi za 1 + … +( n -1),
pa ispitajmo da li vrijedi za 1 + … +( n -1) + n ?
1 + … +( n -1) + n = (n -1)( n -1+1) / 2 + n = n (n +1) / 2 OK!
13. Rekurzija i složenost algoritama 1
13.3 Zauzeće izvršnog stoga kod poziva rekurzivnih funkcija
U programu fact-stog.cpp realizirana je funkcija factorial koristeći simulaciju izvršnog stoga. Program
ispisuje stanje na stogu u svakom koraku rekurzije. Cilj je vidjeti kako rekurzivne funkcije koriste
izvršni stog.
//Program: fakt-stog.c
// Proračun n!. Vrijednost od n mora biti unutar intervala [0,13]
#include <iostream>
#include <vector>
using namespace std;
vector<int> S; // simulator izvrsnog stoga
int Reg; // registar u kojeg se upisuje rezultat funkcija
void printstog()
{
cout <<"Stog: ";
for(int i=0; i<S.size(); i++)
cout << S[i] <<" ";
cout << endl;
}
void push(int n) {S.push_back(n); printstog(); }
int & top(int n=0) {return S[S.size()-1+n];}
void pop() {S.pop_back(); printstog();}
void factorial()
{
int n = top(); // n je lokalna varijabla
if (n == 0)
Reg = 1; // rezultat za n==1
else {
push(n-1); // poziv za arg =n -1
factorial();
pop();
Reg = n * Reg; // vraca rezultat na stog
}
}
int main()
{
int n, result;
cout << "Unesite broj unutar intervala [0,13]\n";
cin >> n;
if((n < 0) || (n > 13)) {
cout << "Otipkali ste nedozvoljenu vrijednost\n" ;
return 1;
}
push(n);
factorial();
result = Reg;
pop();
cout << "Vrijednost "<< n << "! iznosi: " << result << endl;
return 0;
}
13. Rekurzija i složenost algoritama 2
Primjer izlaza za slučaj proračuna 4!:
Unesite broj unutar intervala [0,13]
4
Stog: 4
Stog: 4 3
Stog: 4 3 2
Stog: 4 3 2 1
Stog: 4 3 2 1 0
Stog: 4 3 2 1
Stog: 4 3 2
Stog: 4 3
Stog: 4
Stog:
Vrijednost 4! iznosi: 24
Kod funkcija koje imaju veliki broj rekurzivnih poziva može doći do značajnog ispunjenja izvršnog
stoga. Kod MSDOS operativnog sustava može se maksimalno koristiti 64Kb za stog, pa treba biti
oprezan pri korištenju rekurzivnih funkcija. Kod WIN32 sustava za stog je predviđeno koristiti do
1Mb memorije.
13.4 Usporedba rekurzivnih i iterativnih programa
Za usporedbu rekurzivnih i iterativnih programskih rješenja dati ćemo primjer potprograma za
proračun sume prirodnih brojeva 1,2,..n:
Rekurzivni algoritam za sumu n brojeva je:
1. trivijalni slučaj: ako je n==1 suma(n) je jednaka 1
2. za ostale vrijednosti od n, suma(n) = suma(n-1)+n
rekurzivni proračun sume 1,2,..n iterativni proračun sume 1,2,..n
unsigned suma( unsigned n) unsigned suma(unsigned n)
{ {
if (n == 1) unsigned sum=0;
return 1; while (n > 0) {
else sum += n;
return suma(n – 1) + n; n-—;
} }
return sum;
}
U obje funkcije u svakom se koraku vrši jedno logičko ispitivanje, jedno zbrajanje i jedno oduzimanje.
U rekurzivnoj funkciji se još gubi vrijeme i memorijski prostor za privremeni smještaj argumenata
funkcije.
Usporedbom ova dva primjera vidljivo je da iterativni programi daje brži proračun i manje zauzimaju
memoriju. To je čest slučaj.
Ipak, preporučuje se korištenje rekurzivnih funkcija u onim slučajevima kada to prirodno odgovara
prirodi problema. Tako u analizi programskih metoda se često spominje metoda "podijeli pa vladaj".
Bit će obrađena u sljedećem članku. Kod nje će biti korištena rekurzija kao prirodni put rješenja
problema.
13. Rekurzija i složenost algoritama 3
13.5 Metoda - podijeli pa vladaj (Divide and Conquer)
Opći princip metode ja da se problem podijeli u više manjih problema.
Primjer: Približan proračun drugog korijena broja n
Metoda: odredi vrijednost x za kojeg je (n – x2) približno jednako nuli.
1) Temeljne pretpostavke:
Točno rješenje se nalazi unutar intervala [d,g]. Primjerice, sigurno je da se rješenje nalazi u
intervalu [0,n] ako je n>1, odnosno u intervalu [0,1] ako je n<1. Interval može biti i uži ako
smo sigurni da obuhvaća točno rješenje.
Uobičajeno se uzima da je vrijednost od x u sredini intervala, tj.
x=(d+g)/2.
Vrijednost x je blizu točnog rješenja ako je širina intervala manja od neke po volji odabrane
vrijednosti epsilon (npr.0,000001) , tj. ako je je g-d < epsilon.
Ako je širina intervala veća od epsilon, do rješenje dolazimo koristeći rekurziju preme
sljedećem pravilu:
2) Pravilo rekurzije:
Ako je n < x2 rješenje tražimo u intervalu [d, x], u suprotnom tražimo u intervalu [x, g].
#include <iostream>
#include <cmath>
#include <cstdlib>
using namespace std;
#define EPSILON 0.000001
double sqrt_rek(double n, double d, double g)
{
double x;
x = (d + g)/ 2.0;
if (g - d < EPSILON)
return x;
else if (n < x*x )
return sqrt_rek(n, d, x);
else
return sqrt_rek(n, x, g);
}
double SquareRoot(double n)
{
double g, d=0.0;
if(n < 0) n= -n; // samo za poitivne vrijednosti
// početne granice d=0.0, g=n ili 1 ako je n<1
if(n>1) g=n;
else g=1.0;
return sqrt_rek(n, d, g);
}
13. Rekurzija i složenost algoritama 4
int main( int argc, char *argv[])
{
int i;
double n;
for (i = 1; i < argc; i++)
{
n = atof(argv[i]);
cout <<"Drugi korijen od " << n <<" = " << SquareRoot(n)
<< " (treba biti: "<< sqrt(n) << ")\n";
}
return 0;
}
Nakon poziva programa:
c:>korijen 5 7.6 3.14
Dobije se ispis:
Drugi korijen od 5 = 2.236068 (treba biti 2.236068)
Drugi korijen od 7.6 = 2.756810 (treba biti 2.756810)
Drugi korijen od 3.14 = 1.772004 (treba biti 1.772005)
13.6 Binarno pretraživanje niza
Zadan je niz cijelih brojeva a[n] kojem su elemenati sortirani od manje prema većoj vrijednosti,
tj.
a[i-1] < a[i], za i=1,..n-1
Želimo odrediti da li se u ovom nizu nalazi element vrijednosti x. U tu svrhu koristit ćemo funkciju
binSearch koja daje indeks i, elementa a[i], kojem je vrijednost jednaka traženoj vrijednosti x.
Ako vrijednost od x nije jednaka ni jednom elementu niza funkcija binSearch vraća negativnu
vrijednost -1. Također, uzet ćemo da se može ispitati i samo dio niza, od nekog donjeg indeksa d do
gornjeg indeksa g.
Funkcija binSearch, dakle, mora imati argumente: niz koji se pretražuje, traženu vrijednost x, te
donju i gornju granicu indeksa niza unutar koje se vrši traženje zadane vrijednosti.
int binSearch( int a[],int x, int d, int g);
Problem definiramo rekurzivno na sljedeći način:
1. Temeljne pretpostavke:
Ako u nizu a[i] postoji element jednak traženoj vrijednosti x, njegov indeks je iz intervala
[d,g], gdje mora biti istinito g >= d. Trivijalni slučaj je za d=0, g=n-1, koji obuhvaća cijeli
niz.
Razmatramo element niza indeksa i = (g+d)/2. (dijelimo niz na dva podniza)
Ako je a[i]==x, pronađen je traženi element niza i funkcija vraća indeks i.
2. Pravilo rekurzije:
Ako je a[i] <x rješenje tražimo u intervalu [i+1, g], inače je u intervalu [d, i-1].
int binSearch( int a[],int x, int d, int g)
{
int i;
if (d > g) return –1;
i = (d + g)/ 2;
if (a[i] == x)
return i;
13. Rekurzija i složenost algoritama 5
if (a[i] < x)
return binSearch( a, x, i + 1, g);
else
return binSearch( a, x, d, i - 1);
}
Ilustrirajmo proces traženja vrijednosti x=23 u nizu od 14 elemenata
0 1 2 3 4 5 6 7 8 9 10 11 12 13
1 2 3 5 6 8 9 12 23 26 27 31 34 42
d i g
1 2 3 5 6 8 9 12 23 26 27 31 34 42
d i g
1 2 3 5 6 8 9 12 23 26 27 31 34 42
d i g
1.korak: d=0, g=13, i=6, a[6]<23
2.korak: d=i+1=7,g=14, i=10, a[10]>23
3.korak: d=7, g=i-1=9, i=8, a[8]==23
13.7 Iteracija kao specijalni slučaj rekurzije
Razmotrimo funkciju petlja() unutar koje se izvršava do-while pelja:
void petlja()
{ do
iskaz
while (e);
}
Ova funkcija je semantički jednaka sljedećoj rekurzivnoj funkciji:
void petlja()
{
iskaz
if (e) petlja();
}
Rekurzivni poziv se vrši na kraju (ili na repu) tijela funkcije, stoga se ovaj tip rekurzije naziva "tail"
rekurzija ili "rekurzija na repu". Neki optimizirajući kompajleri mogu prepoznati ovakav oblik
rekurzivne funkcije i transformirati rekurzivno tijelo funkcije u oblik do-while petlje ili se koristi
naredba bezuvjetnog skoka oblika:
void petlja()
{
start: iskaz
if (e) goto start;
}
Na ovaj se način dobija efikasnija funkcija, jer se ne gubi vrijeme i prostor na stogu potreban za poziv
funkcije.
Kod većine rekurzivnih funkcija ova se transformacije ne može provesti. Primjerice funkcija za
proračun n faktorijela:
int factorial(int n)
13. Rekurzija i složenost algoritama 6
{
if(n==0) return 1;
else return n * factorial(n-1);
}
nije "tail" rekurzivna, jer se u izrazu n * factorial(n-1) najprije vrši poziv funkcije factorial,
a zatim naredba množenja.
Funkciju binSearch, opisanu u prethodnom članku, može se lako transformirati u "tail" rekurzivnu
funkciju:
int binSearch( int a[],int x, int d, int g)
{
int i;
if (d > g) return –1;
i = (d + g)/ 2;
if (a[i] == x) return i;
if (a[i] < x) d=i+1;
else g=i-1
return binSearch( a, x, d, g);
}
Dalje se može provesti transformacija u iterativnu funkciju:
int binSearch( int a[],int x, int d, int g)
{
int i;
start: if (d > g) return –1;
i = (d + g)/ 2;
if (a[i] == x) return i;
if (a[i] < x) d=i+1;
else g=i-1
goto start;
}
Konačno možemo napisati iterativno tijelo funkcije u obliku while petlje:
int binSearch( int a[],int x, int d, int g)
{
int i;
while (d <= g)
{
i = (d + g)/2;
if (a[i] == x) return i;
if (a[i] < x) d=i+1;
else g=i-1;
}
return –1;
}
Ova se iterativna verzija funkcije može pojednostaviti za slučaj kada pretražujemo cijeli niz. Tada kao
argument funkcije nije potrebna donja granica indeksa jer je ona jednaka nuli. Umjesto gornje granice
indeksa kao argument koristit će se vrijednost broja elemenata niza (n).
int binSearch( int a[],int x, int n)
{
int i, d=0, g=n-1;
while (d <= g)
{
i = (d + g)/2;
if (a[i] == x) return i;
if (a[i] < x) d=i+1;
else g=i-1;
}
13. Rekurzija i složenost algoritama 7
return –1;
}
U standarnoj biblioteci implementirana je polimorfna funkcija bsearch() i deklarirana je na sljedeći
način:
void *bsearch( const void *px, const void *niz,
size_t n, size_t el_size,
int (*pCmpFun)(const void *, const void *) );
Prvi parametar funkcije je pokazivač na objekt kojeg tražimo, Drugi parametar je pokazivač na prvi
element niz od n elemenata koji zauzimaju el_size bajta. Zadni parametar je pokazivač na usporednu
funkciju koja je ista kao kod qsort funkcije. bsearch() vraća pokazivač na traženi element ili NULL
ako niz ne sadrži taj objekt.
Napisat ćemo tu funkciju pod imenom binsearch() i testirati u programu binsearch.c.
/* Program: binsearch.cpp */
#include <iostream>
#include <stdlib.h>
#include <string.h>
using namespace std;
typedef char *string;
void * binsearch( const void *px, const void *niz, size_t n,
size_t el_size, int (*pCmpFun)(const void *, const void *) )
{
int i, d=0, g=n-1;
int cmp;
char * adr;
while (d <= g)
{
i = (d + g)/2;
adr = (char *)niz + i*el_size;
cmp = (*pCmpFun)((void *)adr, (void *)px);
if (cmp == 0)
return (void *) adr;
if (cmp < 0)
d=i+1;
else
g=i-1;
}
return NULL;
}
int UsporediStringove( const void *pstr1, const void *pstr2 )
{
return strcmp( *(string*) pstr1, *(string*)pstr2 );
}
int main( void )
{
string txt[] = {"Ante", "Ivo", "Marko", "Jure", "Bozo"};
int numstrings = sizeof(txt)/sizeof(txt[0]);
string key="Ivo";
int i, idx;
string * pstr;
13. Rekurzija i složenost algoritama 8
for(i = 0; i < numstrings; i++ )
cout << txt[i] << " " ;
// sortiraj niz stringova leksikografski
// koristi funkciju qsort i strcmp za leksikografsku usporednu
qsort((void *)txt, numstrings, sizeof(char*), UsporediStringove);
cout << "\nNakon sortiranja:\n";
for(i = 0; i < numstrings; i++ )
cout << txt[i] << " " ;
// pronadji string key
pstr =(string*) binsearch(&key, txt,
numstrings, sizeof(char*), UsporediStringove);
if(pstr != NULL)
cout << "\nPronadjen string " << *pstr
<< " na adresi" <<pstr << endl;
else
cout << "\nNije pronadjen string " << key << endl;
return 0 ;
}
Dobije se ispis:
Ante Ivo Marko Jure Bozo
Nakon sortiranja:
Ante Bozo Ivo Jure Marko
Pronadjen string Ivo na adresi 0022FF48
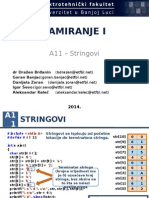
Kule Hanoia
Obradit ćemo problem, koji bez sumnje predstavlja najpoznatiji rekurzivni problem u kompjuterskoj
literaturi. Radi se o inteligentoj igrici koja se naziva Kule Hanoia. Problem je predstavljen na slici.
A B C
Postoje tri štapa označena s A,B i C. Na prvom štapu su nataknuti cilindrični diskovi promjenljive
veličine, koji imaju rupu u sredini. Zadatak je premjestiti sve diskove s štapa A na štap B u redosljedu
kako se nalaze na štapu A.
Pri prebacivanju diskova treba poštovati sljedeće pravila:
1. Odjednom se smije pomicati samo jedan disk.
2. Ne smije se stavljati veći disk povrh manjeg diska.
3. Može se koristiti štap C za privremeni smještaj diskova, ali uz poštovanje prethodna dva
pravila.
13. Rekurzija i složenost algoritama 9
U čemu je ovaj problem rekurzivan? Pokušajmo definirati temeljni slučaj i pravilo rekurzije.
Temeljni slučaj - Koji je najednostavniji slučaj kojeg svatko može riješiti. Ako kula sadrži samo
jedan disk, tada je rješenje jednostavno: prebaci se taj disk na ciljni štap B.
Rekurzivno pravilo - Ako kula sadrži N diskova, pomicanje diskova se može izvesti u tri koraka
1. Pomaknuti gornjih N-1 disk na pomoćni štap C.
2. Preostali donji disk s štapa A pomaknuti na ciljni štap B.
3. Zatim kulu od N-1 diska s pomoćnog štapa C treba prebaciti na ciljni štap B.
Kako napisati funkciju koji izvršava gornje pravilo. Nazvat ćemo je pomakni_kulu, a argumente
koji će nam biti potrebni su: broj diskova koje treba pomaknuti, ime početnog štapa , ime ciljnog
štapa, ime pomoćnog štapa.
void pomakni_kulu(int n, char A, char B, char C);
Također će nam biti potrebna funkcija kojom će se na prikladan način označiti prebacivanje
jednog diska. Nju možemo odmah definirati:
void pomakni_disk(char sa_kule, char na_kulu)
{
cout << sa_kule << " -> " << na_kulu << endl;
}
Korištenjem ove funkcije i pravila rekurzije, funkcija MoveTower se može napisati na sljedeći
način:
void pomakni_kulu(int n, char A, char B, char C)
{
if (n == 1) { // temeljni slučaj
pomakni_disk(A, B);
}
else {
pomakni_kulu (n - 1, A, C, B); // 1. pravilo
pomakni_disk (A, B); // 2. pravilo
pomakni_kulu (n - 1, C, B, A); // 3. pravilo
}
}
Ili još jednostavnije:
void pomakni_kulu(int n, char A, char B, char C)
{
if (n > 0)
{
pomakni_kulu (n - 1, A, C, B);
pomakni_disk (A, B);
pomakni_kulu (n - 1, C, B, A);
}
}
jer za slučaj kada je n=1 pomakni_kulu(0, ....) ne izvršava ništa pa se u tom slučaju izvršava
funkcija pomakni_disk(A,B), što je pravilo temeljnog slučaja.
Za testiranje funkcije pomakni_kulu() , koristit ćemo program hanoi.c:
/* Program: hanoi.c */
#include <iostream>
using namespace std;
void pomakni_kulu(int n, char A, char B, char C);
13. Rekurzija i složenost algoritama 10
void pomakni_disk(char sa_kule, char na_kulu)
int main()
{
int n = 3; /* npr. za slučaj 3 diska*/
pomakni_kulu(n, 'A','B','C');
return 0;
}
Nakon izvršenja ovog programa dobije se izvještaj o pomaku diskova oblika:
A -> B
A -> C
B -> C
A -> B
C -> A
C -> B
A -> B
U ovom primjeru je očito da se pomoću rekurzije dobije fascinantno jednostavno rješenje problema, i
teško da postoji neka druga metoda kojom bi se ovaj problem riješio na jednako efikasan način.
13.8 Složenost algoritama
Kvalitetan je onaj algoritam kojim se postiže efikasno korištenje memorijskog prostora M i
prihvatljivo vrijeme obrade T.
Pri analizi složenosti algoritama uvodi se mjera "dimenzije problema", primjerice kada se obrađuju
nizovi, onda dimenziju problema predstavlja duljina niza n, a kada su u pitanju kvadratne matrice,
onda je dimenzija matrice istovremeno i dimenzija problema. Ako je n dimenzija problema, onda nas
interesiraju funkcije M(n) i T(n).
Veličina T(n) se često naziva vremenska složenost algoritma (engl. time complexity), dok je M(n)
prostorna složenost. Veličini T(n) se pridaje znatno više značaja nego veličini M(n), pa se pod
skraćenim pojmom "složenost" (eng. complexity) obično podrazumijeva vremenska složenost. Razlog
tome je iskustvo u razvoju algoritama, koje je pokazalo da je zauzeće memorije znatno manji problem
od postizanja prihvatljivog vremena obrade.
"Veliki-O" notacija
Analizirajmo sada segmemt programa u kojem treba sumirati elemente kvadratne matrice, dimenzije
n. Također, označimo broj ponavljanja naredbi (pri tome se podrazumjeva da su signifikantne one
naredbe u kojima se vrši zbrajanje).
NAREDBE PROGRAMA BROJ PONAVLJANJA
-------------------------------------------
S 0 ; ........
for(i=0; i<n; i++) { ........n
for(j=0; j<n; j++){ ........n*n
S S + M[i][j] ........n*n
--------------------------------------------
Ako se uzme da prosječno vrijeme izvršenja jedne naredbe iznosi t0, dobije se ukupno vrijeme
izvršenja algoritma iznosi:
T(n) = (2n² + n)*t0
Veličina T(n) je posebno važna za velike vrijednosti od n. U to slučaju, možemo zaključiti da je:
13. Rekurzija i složenost algoritama 11
T(n) konst * n²
Ovaj se zaključak u računarskoj znanosti piše u obliku tzv. "veliki-O" notacije:
T(n) = O(n²)
i kaže se da je T(n) "veliki O od n²". Funkcija f(n) = n² predstavlja red složenosti algoritma. Uočite da
vrijednost konstantnog faktora ne određuje složenost algoritma već samo faktor koji ovisi o veličini
problema.
Definicija: Složenost algoritma u "veliki-O" notaciji definira se na sljedeći način:
T(n) = O ( f(n) ), (čita se: T je veliki-O od f)
ako postoje pozitivne konstante C i n0, takove da je 0 T(n) C * f(n), za sve vrijednosti n n0.
U prethodnom je primjeru funkcija složenosti određena razmatrajući broj operacija u kojima se vrši
zbrajanje. To ne treba uzeti kao pravilo, već za pojedini problem treba sagledati koje su operacije
dominantne po zauzeću procesorskog vremena. Primjerice, kod metoda pretraživanja niza to će biti
naredbe usporedbe i pridjele vrijednosti.
Klasifikacija algoritama prema redu funkcije složenosti za najpoznatije klase algoritama prikazana je u
sljedećoj tablici:
Tip algoritma f(n)
Konstantan const.
Logaritamski log2n
Linearan n
Linearno-logaritamski nlog2n
Kvadratni n2
Stupanjski nk (k>2)
Eksponencijalni kn (k>1)
Faktorijelni n!
Ova je tablica uređena po kriteriju rastuće složenosti algoritama. Pri izradi algoritama cilj je nalaženje
rješenja koje je manjeg reda složenosti, a posebno je značajan rezultat kada se nađe (najčešće
približno) polinomsko ili logaritamsko rješenje nekog od eksponencijalnih problema. U nastavku bit
će dan kratak opis svake od navedenih klasa algoritama.
KONSTANTNI ALGORITMI
Konstantni algoritmi su klasa algoritama kod kojih je vrijeme rada približno konstantno i ne ovisi od
veličine problema. Primjerice, program koji računa kvadratni korijen realnog broja do rezultata po
pravilu dolazi poslije približno istog vremena rada bez obzira kolika je veličina broja koji je uzet za
ulazni podatak.
LOGARITAMSKI ALGORITMI
Kod logaritamskog algoritma vrijeme rada programa proporcionalno je (najčešće binarnom) logaritmu
veličine problema. Imajući u vidu sporost porasta logaritamske funkcije vidi se da se ovdje radi o
najefikasnijim i stoga najpopularnijim algoritmima. Tipičan predstavnik logaritamskih algoritama je
binarno pretraživanje sortiranog niza prikazano u prethodnom odjeljku. Opća koncepcija
logaritamskih algoritama je sljedeća:
13. Rekurzija i složenost algoritama 12
1. Obaviti postupak kojom se veličina problema prepolovi.
2. Nastaviti razlaganje problema dok se ne dođe do veličine 1.
3. Obaviti završnu obradu s problemom jedinične veličine.
Ukupan broj razlaganja k dobije se iz uvjeta:
n / 2k = 1 .
odnosno k=log2n. Kako je po pretpostavci broj operacija koji se obavlja pri svakom razlaganju
približno isti, to je i vrijeme rada približno proporcionalno broju razlaganja, odnosno binarnom
logaritmu od n.
LINEARNI ALGORITMI
Linearni algoritmi se javljaju u svim slučajevima gdje je obradom obuhvaćeno n istovjetnih podataka i
gdje udvostručenje količine radnji ima za posljedicu udvostručenje vremena obrade. Opći oblik
linearnog algoritma može se prikazati u vidu jedne for petlje:
for (i=0; i < n; i++)
{obrada koja traje vrijeme t}
Zanemarujući vrijeme opsluživanja for petlje, u ovom slučaju funkcija složenosti je T(n)=nt, pa je
T(n) = O(n).
U slučajevima kada nije moguće deterministički odrediti vrijeme izvršavanja sadržaja petlje može se
umjesto vremena rada T(n) statistički odrediti srednji broj naredbi I(n) koje program obavlja. Tada se
podrazumijeva da je T(n)=t1*I(n), t1=vrijeme izvršavanja prosječne naredbe = konst.
Budući da vrijedi
T(n) = O( f(n) ) , I(n) = O( f(n) ),
slijedi da se traženi red funkcije složenosti f(n) može podjednako odrediti kako iz T(n), tako i iz I(n).
Primjerice, izračunavanje maksimalne komponente niza bi imalo sljedeću analizu broja naredbi:
Naredbe PROGRAMA BROJ PONAVLJANJA
----------------------------------------------------
max a[0] 1
for(i=1; i<n; i++) (n-1)
if (a[i] > max) (n-1)
max = a[i] (n-1)p (0<=p<=1)
----------------------------------------------------
Ovdje p označava vjerojatnost da dođe do ispunjenja uvjeta a[i]> max ( p ne ovisi od n).
Sumirajući broj ponavljanja pojedinih naredbi dobijamo da je ukupan broj izvršenih naredbi
I(n) = 1 + (n-1)(3+p) = (3+p) n - 1 - p.
U ovom izrazu dominantan je samo prvi član polinoma, pa je f(n) = n, odnosno T(n) = O(n).
LINEARNO-LOGARITAMSKI ALGORITMI
Linearno-logaritamski algoritmi, složenosti O(n log n) ), spadaju u klasu veoma efikasnih algoritama
jer im složenost, za veliki n, raste sporije kvadratne funkcije. Primjer za ovakav algoritam je
Quicksort, koji će biti detaljno opisan kasnije. Bitna osobina ovih algoritama je sljedeća
(1) Obaviti pojedinačnu obradu kojom se veličina problema prepolovi.
(2) Unutar svake polovine sekvencijalno obraditi sve postojeće podatke.
(3) Nastaviti razlaganje problema dok se ne dođe do veličine 1.
13. Rekurzija i složenost algoritama 13
Slično kao i kod logaritamskih algoritama i ovdje je ukupan broj polovljenja log2n, ali kako se pri
svakom polovljenju sekvencijalno obrade svi podaci, to je ukupan broj elementarnih obrada jednak
nlog2n, i to predstavlja rezultantni red funkcije složenosti.
KVADRATNI ALGORITMI
Kvadratni algoritmi, složenosti O(n2), najčešće se dobijaju kada se koriste dvije for petlje jedna
unutar druge. Primjer je dat na početku ovog poglavlja.
STUPANJSKI ALGORITMI
Stupanjski algoritmi se mogu dobiti poopćenjem kvadratnih algoritama, za algoritam s k umetnutih
for petlji složenost je O(nk).
EKSPONENCIJALNI ALGORITAMSKI
Eksponencijalni algoritmi O(kn) spadaju u kategoriju problema za koje se suvremena računala ne
mogu koristiti, izuzev u slučajevima kada su dimenzije takvog problema veoma male. Jedan od
takovih primjera je algoritam koji rekurzivno rješava igru "Kule Hanoia", opisan u prethodnom
poglavlju.
FAKTORIJELNI ALGORITMI
Kao primjer faktorijelnih algoritama najčešće se uzima problem trgovačkog putnika. Problem je
formuliran na sljedeće način: zadano je n+1 točaka u prostoru i poznata je udaljenost između svake
dvije točke j i k. Polazeći od jedne točke potrebno je formirati putanju kojom se obilaze sve točke i
vraća opet u polaznu točku tako da je ukupni prijeđeni put minimalan.
Trivijalni algoritam za rješavanje ovog problema mogao bi se temeljiti na uspoređivanju duljina svih
mogućih putanja. Broj mogućih putanja iznosi n!. Polazeći iz početne točke postoji n putanja do n
preostalih točaka. Kada odaberemo jednu od njih i dođemo u prvu točku onda nam preostaje n-1
moguća putanja do druge točke, n-2 putanja do treće točke, itd., n+1-k putanja do k-te točke, i na kraju
samo jedna putanja do n-te točke i natrag u polaznu točku. Naravno da postoje efikasnije varijante
algoritma za rješavanje navedenog problema, ali u opisanom slučaju sa jednostavnim nabrajanjem i
uspoređivanjem duljina n! različitih zatvorenih putanja dolazimo do algoritma čije je složenost O[n!].
13.9 Sortiranje
Sortiranje je postupak kojim se neka kolekcija elemenata uređuje tako da se elementi poredaju po
nekom kriteriju. Kod numeričkih nizova red elemenata se obično uređuje od manjeg prema većim
elementima, kod nizova stringova red se određuje prema leksikografskom rasporedu. Kod kolekcija
kojoj elementi strukture imaju više članova obično se odabire jedan član strukture kao ključni element
sortiranja.
Sortiranje je važno u analizi algoritama, jer su analizom različitih metoda sortiranja postavljeni neki
od temeljnih kompjuterskih algoritama.
Za analizu metoda sortiranja postavit ćemo sljedeći problem: Odredite algoritam u kojem je:
Ulaz: Niz A[0..n-1] od n elemenata.
Izlaz: Niz A sa elementima poredanim tako da je
A[0] <= A[1] <= A[2] <= ... <= A[n-2] <= A[n-1].
13. Rekurzija i složenost algoritama 14
Selekcijsko sortiranje
Započet ćemo s vjerojatno najjednostavnijom metodom koju ćemo nazvati selekcijsko sortiranje. Ideja
algoritma je:
1. Pronađi najmanji element i njegov indeks k.
2. Taj element postavi na početno mjesto u nizu (A[0]), a element koji je dotad postojao na
indeksu 0 postavi na indeks k.
3. Zatim treba pronaći najmanji element počevši od indeksa 1. Kada ga pronađemo
zamjenjujemo ga s elementom indeksa 1.
4. Postupak ponavljamo za sve indekse (2.. n-2).
Primjerice za sortirati niz od 6 elemenata: 6 4 1 5 3 2 , treba izvšiti sljedeće operacije:
6 4 1 5 3 2 -> min od A[0..5] zamijeni sa A[0]
1 4 6 5 3 2 -> min od A[1..5] zamijeni sa A[1]
1 2 6 5 3 4 -> min od A[2..5] zamijeni sa A[2]
1 2 3 5 6 4 -> min od A[3..5] zamijeni sa A[3]
1 2 3 4 6 5 -> min od A[4..5] zamijeni sa A[4]
1 2 3 4 5 6 -> niz je sortiran
Ovaj postupak opisujemo pseudo kodom:
for (i = 0; i < n-1; i++)
{
imin = indeks najmanjeg elementa u A[i..n-1];
Zamijeni A[i] sa A[imin];
}
Uočite da petlja izvršava dok je i < n-1, a ne za i < n, jer ako A[0..n-2] sadrži n-1 najmanjih
elemenata, tada posljednji element mora biti najveći, i on se nalazi na ispravnom položaju , tj. A[n-1].
Indeks najmanjeg elementa u A[i..n-1] pronalazimo sa:
imin = i;
for (j = i+1; j < n; j++)
if (A[j] < A[min]) imin=j;
A zamjenu vrijednosti vršimo funkcijom swap();
/* Zamjena vrijednosti dva int */
void swap(int &a, int &b)
{
int t = a;
a = b;
b = t;
}
Sada možemo napisati funkciju za selekcijsko sortiranje niza A koji ima n elemenata:
void selectionSort(int *A, int n)
{
int i, j;
int imin; /* indeks najmanjeg elementa u A[i..n-1] */
for (i = 0; i < n-1; i++)
{
/* Odredi najmanji element u A[i..n-1]. */
imin = i; /* pretpostavi da je to A[i] */
for (j = i+1; j < n; j++)
if (A[j] < A[imin]) /* ako je A[j] najmanji */
imin = j; /* zapamti njgov indeks */
/* Sada je A[imin] najmanji element od A[i..n-1], */
/* njega zamjenjujemo sa A[i]. */
13. Rekurzija i složenost algoritama 15
swap(A[i], A[imin]);
}
}
Analiza selekcijskog sortiranja
Uzet ćemo da se svaka naredba izvršava neko konstantno vrijeme. Svaka iteracija vanjske petlje
(indeks i) traje konstantno vrijeme t1 plus vrijeme izvršenja unutarnje petlje (indeks j). Svaka iteracija
u unutarnjoj petlji traje konstantno vrijeme t2 .
Broj iteracija unutarnje petlje ovisi u kojoj se iteraciji nalazi vanjska petlja:
Broj operacija u
i
unutarnjoj petlji
0 n-1
1 n-2
2 n-3
... ...
n-2 1
Ukupno vrijeme je:
T(n) = [t1 + (n-1) t2] + [t1 + (n-2) t2] + [t1 + (n-3) t2] + ... + [t1 + (1) t2]
odnosno, grupirajući članove u oblik t1 ( …) + (...) t2 dobije se
T(n) = (n-1) t1 + [ (n-1) + (n-2) + (n-3) + ... + 1 ] t2
Izraz u uglatim zagradama predstavlja sumu aritmetičkog niza
1 + 2 + 3 + ... + (n-1) = (n-1)n/2 = (n2-n)/2,
pa je ukupno vrijeme jednako:
T(n) = (n-1) t1 + [(n2-n)/2] t2 = - t1 + t1 n - t2 n/2 + t2 n2/2
Vidimo da dominira član sa n2 , pa je složenost selekcijskog sortiranja jednaka O(n2)
Sortiranje umetanjem
Algoritam sortiranja umetanjem (eng. insertion sort), se zasniva na postupku koji je sličan načinu kako
se slažu igraće karte. Ideju demonstrirajmo nizom od n=6 brojeva. Algoritam se vrši u u n-1 korak. U
svakom koraku se umeće i-ti element u dio niza koji mu prethodi (A[0..i-1]), tako taj niz bude sortiran.
6 4 1 5 3 2 -> ako je A[1]< A[0], umetni A[1] u A[0..0]
4 6 1 5 3 2 -> ako je A[2]< A[1], umetni A[2] u A[0..1]
1 4 6 5 3 2 -> ako je A[3]< A[2], umetni A[3] u A[0..2]
1 4 5 6 3 2 -> ako je A[4]< A[3], umetni A[4] u A[0..3]
1 3 4 5 6 2 -> ako je A[5]< A[4], umetni A[5] u A[0..4]
1 2 3 4 5 6 -> niz je sortiran
Algoritam se može zapisati pseudokodom:
for (i = 1; i < n; i++)
{
el = A[i];
analiziraj elemente A[0 .. i-1]
počevši od indeksa j=i-1, do indeka j=0
ako je el < A[j], pomakni element A[j] na mjesto A[j+1]
13. Rekurzija i složenost algoritama 16
inače prekini
zatim umetni el na mjesto A[j+1]
}
pa dobijemo funkciju:
void insertionSort(int *A, int n)
{
int i, j;
int el;
for (i = 1; i < n; i++)
{
el = A[i];
for(j = i-1; j >= 0; j--)
{
if(el < A[j])
A[j+1] = A[j];
else
break;
}
A[j+1] = el;
}
}
Analza složenosti sortiranja umetanjem
Pokazat ćemo da je sortiranje umetanjem primjer algoritma u kojem prosječno vrijeme izvršenja nije
puno kraće od vremena izvršenja koje se postiže u najgorem slučaju.
Najgori slučaj
Vanjska petla se izvršava u n-1 iteracija, što daje O(n) iteracija. U unutarnjoj petlji se vrši od 0 do
i<n iteracija, u najgorem slučaju vrši se također O(n) iteracija. To znači da u najgorem slučaju imamo
O(n) O(n) operaciaj, dakle složenost je O(n2).
Najbolji slučaj
U najboljem slučaju u unutarnjoj pelji se vrši 0 iteracija. To nastupa kada je niz sortiran. Tada je
složenost O(n). Može se uzeti da to vrijedi i kada je niz "većim dijelom sortiran" jer se tada rijetko
izvršava unutarnje petlja.
Prosječni slučaj
Uzmemo li da se u prosječnom slučaju vrši n/2 iteracija u unutarnjoj petlji, to također daje složenost
unutarnje petlje O(n), paje ukupna složenost: O(n2).
Quicksort
Quicksort je rekurzivna metoda sortiranja kojom se u prosječnom slučaju postiže O(n log2 n), što je
znatno bolje od O(n2) (koji nastaje samo u najgorem slučaju). Često se koristi u praksi. Temelji se na
tehnici podijeli pa vadaj.
Neka je problem sortirati dio niza A[p..r]. (U početnom pozivu mi ćemo sortirati A[0..n-1], ali sada
ćemo problem postaviti za podniz A[p..r]) . Koristi se algoritam:
13. Rekurzija i složenost algoritama 17
1. PODIJELI. Izaberi jedan element iz niza A[p..r] i zapamti njegovu vrijednost. Taj element
ćemo nazavati pivot. Nakon toga podijeli A[p..r] u dva podniza A[p..q] i A[q+1..r] koji imaju
slijedeća svojstva:
1. Svaki element A[p..q] je manji ili jednak pivotu .
2. Svaki element A[q+1..r] je veći ili jednak pivotu.
3. Niti jedan podniz ne sadrži sve elemente (odnosno ne smije biti prazan).
2. VLADAJ. Rekurzivno sortiraj oba podniza A[p..q] i A[q+1..r], i problem će biti riješen kada
oba podniza budu imala manje od 2 elementa.
Uvjet da nijedan podniz ne bude prazan je potreban jer kada bi to bilo ispunjeno, tada bi rekuzivni
problem bio isti kao originalni problem, pa bi nastala bekonačna rekurzija.
Pokažimo sada kako podijeliti podnizove da budu ispunjeni postavljeni uvjeti. Podjela se vrši
funkcijom
int partition(int *A, int p, int r)
koja vraća indeks q (gdje je izvršena podjela na podnizove).
Podjela se vrši pomoću dva indeksa (i, j) i pivota koji se odabire kao element A[p], prema pravilu:
i pomičemo od početka prema kraju niza, dok ne nađemo element A[i] koji je veći ili jednak
pivotu
j pomičemo od kraja prema početku niza, dok ne nađemo element A[j] koji je manji ili jednak
pivotu
zatim zamjenjujemo vrijednosti A[i] i A[j], kako bi svaki svaki element A[p..i] bio manji ili
jednak pivotu, a svaki element A[j..r] veći ili jednak pivotu.
Ovaj se proces nastavlja dok se ne dobije da je i > j. Tada je podjela završena, a j označava
indeks koji vraća funkcija partition. Ovaj uvjet ujedno osigurava da nijedan podniz neće biti
prazan.
Ovaj postupak je ilustriran na nizu A[4..13]. Označeni su indeksi (i,j), a potamnjeni elementi
pokazuju koje elemente zamjenjujemo. Linija podjela je prikazana u slučaju kada i postane veći od
j.
13. Rekurzija i složenost algoritama 18
/* Podijeli A[p..r] u podnizove A[p..q] and A[q+1..r],
* gdje je p <= q < r, i
* svaki element A[p..q] <= od elementa A[q+1..r].
* Početno se izabire A[p] kao pivot
* Vraća vrijednost od q koja označava podjelu.
/*
int partition(int *A, int p, int r)
{
int pivot = A[p]; /* izbor pivot-a */
int i = p - 1; /* index lijeve strane A[p..r] */
int j = r + 1; /* index lijeve strane A[p..r] */
while (1) {
/* Nadji sljedeći manji indeks j za koji je A[j] <= pivot. */
while (A[--j] > pivot)
{}
13. Rekurzija i složenost algoritama 19
/* Nadji sljedeći veći indeks i za koji je A[i] >= pivot. */
while (A[++i] < pivot)
{}
/* Ako je i >= j, raspored je OK. */
/* inače, zamijeni A[i] sa A[j] i nastavi. */
if (i < j)
swap(A[i], A[j]);
else
return j;
}
}
Pomoću ove funkcije se sada iskazuje kompletni quicksort algoritam:
/* Sortira niz A[p..r] - quicksort algoritmom
* Podijeli A[p..r] u podnizove A[p..q] i A[q+1..r],
* p <= q < r, i
* svaki element A[p..q] je <= od elementa A[q+1..r].
* Zatim rekurzivno sortiraj A[p..q] i A[q+1..r].
/*
void quicksort(int *A, int p, int r)
{
if (p < r) /* završava kada podniz ima manje od 2 elementa */
{
int q = partition(A, p, r); /* q je pivot */
quicksort(A, p, q); /* rekurzivno sortiraj A[p..q] */
quicksort(A, q+1, r); /* recurzivno sortiraj A[q+1..r]*/
}
}
Analiza složenosti quicksort algoritma
Prvo uočimo da je vrijeme koje je potrebno za podjelu podnizova od n elemenata, proporcionalno
broju elemenata cn (konstanta c > 0), tj. složenost je O(n). Analizirajmo zatim broj mogućih
rekurzivnih poziva.
Najbolji slučaj
U najboljem slučaju nizovi se dijele na dvije jednake polovine. Pošto je tada ukupan broj razlaganja
jednak log2 n donije se da je složenost O(n)O(log2 n) = O(n log2 n).
Najgori slučaj
U najgorem slučaju podjela na podnizove se vrši tako da je u jednom podnizu uvijek samo jedan
element. To znači da bi tada imali n rekurzivnih poziva, pa bi ukupna složenost bila O(n) O(n)=
O(n2). Najgori slučaj nastupa kada je niz sortiran ili "skoro" sortiran.
Prosječni slučaj
Analiza prosječnog slučaja je dosta komplicirana. Ovdje je nećemo iznositi. Važan je zaključak da se
u prosječnom slučaju dobija složenost koja je bliska najboljem slučaju O(n log2 n).
Kako odabrati pivot element
U prethodnom algoritmu za pivota je odabran početni element A[p]. U praksi se pokazalo da je znatno
povoljnije odabir pivota vršiti po nekom slučajnom uzorku. Recimo, ako slučajno odaberemo index ix
i element A[ix] kao pivot, tada se smanjuje mogućnost da se dobije nepovoljna podjela kod skoro
sortiranih nizova. Cilj je dobiti podjelu koja je bolja od omjera n/3:2n/3. Na ovaj način se dobija
13. Rekurzija i složenost algoritama 20
vjerojatnostdobre podjele koja je veća od 30%. Sljedećim postupkom se još dobija bolja vrjerojatnost
dobre podjele (50%). Odaberu se tri indeksa po slučajnom uzorku, a zatim se iz niza izabere jedan od
ova tri elementa koji je najbliži srednjoj vrijednosti (median).
Dublje opravdanje ove metode ovdje neće biti dano. Pokazalo se, da uz primjenu takovog postupka,
quicksort predstavlja najbrži poznati način sortiranja nizova, pa je implementiran u standardnoj
biblioteci C jezika.
13. Rekurzija i složenost algoritama 21
You might also like
- Algoritmi I Strukture Podataka (FER)Document29 pagesAlgoritmi I Strukture Podataka (FER)Anamaria Donkov100% (2)
- Rekurzija Seminarski RadDocument10 pagesRekurzija Seminarski RadMladi UčoNo ratings yet
- Algoritmi I Strukture Podataka FERDocument29 pagesAlgoritmi I Strukture Podataka FERDamir2343No ratings yet
- Prvi Kolokvijum C++ OOP2Document37 pagesPrvi Kolokvijum C++ OOP2AleksandarNo ratings yet
- PMA RekurzijaDocument28 pagesPMA RekurzijaChipNo ratings yet
- Rekurzivne Funkcije, ModuliDocument39 pagesRekurzivne Funkcije, ModuliStipe PavelicNo ratings yet
- Algoritmi I Strukture PodatakaDocument266 pagesAlgoritmi I Strukture PodatakaIvanaŠokčevićNo ratings yet
- TP 2009 Popravni Ispit Sa RjesenjimaDocument22 pagesTP 2009 Popravni Ispit Sa RjesenjimaAleem SpahoNo ratings yet
- C 25-27Document3 pagesC 25-27ljubomir grubljesicNo ratings yet
- Algoritmi1920-09-UputeZa7VjezbuDocument6 pagesAlgoritmi1920-09-UputeZa7VjezbuStipe PavelicNo ratings yet
- Zadaci Iz Primijenje I Programiranja Računala (PPR)Document8 pagesZadaci Iz Primijenje I Programiranja Računala (PPR)ValentinaNo ratings yet
- Predavanja 12 - U 13. Sedm. - Iz IM1 - 2014 - 2015Document25 pagesPredavanja 12 - U 13. Sedm. - Iz IM1 - 2014 - 2015Amar FeragetNo ratings yet
- Mi 2013Document4 pagesMi 2013Miron LekoNo ratings yet
- Seminarski Rad C++ Ognjen KosticDocument41 pagesSeminarski Rad C++ Ognjen KosticOgnjen KosticNo ratings yet
- C Jezik - Funkcije - RekurzijaDocument24 pagesC Jezik - Funkcije - RekurzijaValentin FuntakNo ratings yet
- Reseni Zadaci OOP C++ 3Document3 pagesReseni Zadaci OOP C++ 3tvoj SamNo ratings yet
- Analiza Vremenske Kompleksnosti Algoritama - : Izvršavanja ProgramaDocument17 pagesAnaliza Vremenske Kompleksnosti Algoritama - : Izvršavanja ProgramaM SNo ratings yet
- Uradjeni Tutovi PDFDocument82 pagesUradjeni Tutovi PDFMustafa PašićNo ratings yet
- 01 RNDDocument13 pages01 RNDKambizNo ratings yet
- 01 RNDDocument17 pages01 RNDurosNo ratings yet
- RekurzijaDocument33 pagesRekurzijadjani marsan0% (1)
- Sverc - Metode OptimizacijeDocument3 pagesSverc - Metode OptimizacijeMarko ZadroNo ratings yet
- Rjesavanje Zadataka U Programskom Jeziky Python - Bojan DjuricDocument17 pagesRjesavanje Zadataka U Programskom Jeziky Python - Bojan Djuricarandjic06333No ratings yet
- Formula UključivanjaDocument5 pagesFormula Uključivanjalennon757No ratings yet
- C Jezik Zadaci Za Vjezbu PDFDocument79 pagesC Jezik Zadaci Za Vjezbu PDFmystery015No ratings yet
- 2011 12 3 RokDocument4 pages2011 12 3 Roklila240772No ratings yet
- 2020 LA LjADocument137 pages2020 LA LjAEdin ManjoNo ratings yet
- 9.predavanje-Pregled Elementarnih FunkcijaDocument36 pages9.predavanje-Pregled Elementarnih FunkcijaNejraa 'BaajricNo ratings yet
- 12 Operatori U C-UDocument23 pages12 Operatori U C-Ububy6591No ratings yet
- AISPokejeaDocument48 pagesAISPokejeaAdrijan MalinovićNo ratings yet
- Matematika 2.dio A)Document71 pagesMatematika 2.dio A)edoopanovicNo ratings yet
- Sta Su FunkcijeDocument9 pagesSta Su FunkcijeMihajlo LetićNo ratings yet
- GrupisanjeDocument6 pagesGrupisanjeSanja StojanovicNo ratings yet
- 2.4 If NaredbaDocument3 pages2.4 If Naredbaljubomir grubljesicNo ratings yet
- Ciklicni Algoritmi - PetljeDocument47 pagesCiklicni Algoritmi - PetljevanjatodoNo ratings yet
- C 19-21Document3 pagesC 19-21ljubomir grubljesicNo ratings yet
- 1.predavanje-NEODREĐENI INTEGRALDocument18 pages1.predavanje-NEODREĐENI INTEGRALakremijeNo ratings yet
- (TP 2021-22) I Parcijalni Ispit - Primjer 3Document2 pages(TP 2021-22) I Parcijalni Ispit - Primjer 3Sunčana Strana UliceNo ratings yet
- (TP 2021-22) I Parcijalni Ispit - Primjer 2Document2 pages(TP 2021-22) I Parcijalni Ispit - Primjer 2Sunčana Strana UliceNo ratings yet
- Reseni Zadaci OOP C++ 5Document2 pagesReseni Zadaci OOP C++ 5tvoj SamNo ratings yet
- ktss2017 BiltenDocument21 pagesktss2017 BiltenMEDINA SOKOLOVIC-ALAJMOVICNo ratings yet
- 7 - 4rekurzijeDocument14 pages7 - 4rekurzijeFristajlo FreestailoNo ratings yet
- Seminarski Rad Iz INTEGRALADocument15 pagesSeminarski Rad Iz INTEGRALACarterNo ratings yet
- Reseni Zadaci OOP C++ 1Document2 pagesReseni Zadaci OOP C++ 1tvoj SamNo ratings yet
- Skripta Za Prvi TestDocument19 pagesSkripta Za Prvi TestHamdija MujezinNo ratings yet
- Zadaci Za Vjezbu 1Document11 pagesZadaci Za Vjezbu 1anteddNo ratings yet
- Programiranje FortranDocument312 pagesProgramiranje FortrandrajabajaNo ratings yet
- Programiranje C StringoviDocument17 pagesProgramiranje C StringoviМилимир АксићNo ratings yet
- ASP Baza PitanjaDocument14 pagesASP Baza PitanjaMaja VrsaljkoNo ratings yet
- Kontroljni DPDocument13 pagesKontroljni DPjanaNo ratings yet
- 5 - 3dstogoviDocument22 pages5 - 3dstogoviFristajlo FreestailoNo ratings yet
- Numericke Metode-Seminarski Rad Monte Carlo Metoda FortranDocument20 pagesNumericke Metode-Seminarski Rad Monte Carlo Metoda FortranJoshua DavisNo ratings yet
- Uvod U Numeričku MatematikuDocument10 pagesUvod U Numeričku Matematikuzloncar3No ratings yet
- Matematika 2 SeminarskiDocument16 pagesMatematika 2 SeminarskiAmar HalimićNo ratings yet
- M1 1 Kol gr1Document2 pagesM1 1 Kol gr1まりなのちkiflaNo ratings yet
- 9 ZupanovicDocument4 pages9 ZupanovicまりなのちkiflaNo ratings yet
- M1 1 Zav 1 DioDocument2 pagesM1 1 Zav 1 DioまりなのちkiflaNo ratings yet
- Geo PonavljanjeDocument4 pagesGeo PonavljanjeまりなのちkiflaNo ratings yet
- Liberalizam 2Document2 pagesLiberalizam 2まりなのちkiflaNo ratings yet
- Revolucije U Europi Do 1848-9.Document1 pageRevolucije U Europi Do 1848-9.まりなのちkiflaNo ratings yet
- 2 Zadatak LOGIKADocument1 page2 Zadatak LOGIKAまりなのちkiflaNo ratings yet