You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- POP - UDI.005 - Assistência de Enfermagem Ao Paciente Submetido À Ressonância MagnéticaDocument4 pagesPOP - UDI.005 - Assistência de Enfermagem Ao Paciente Submetido À Ressonância MagnéticaPoliclinica Costa do DescobrimentoNo ratings yet
- Sted User ManualDocument91 pagesSted User ManualMuhammadAleemAsgharNo ratings yet
- Unit 3Document4 pagesUnit 3Nhi Nhi100% (2)
- INFORME Auditoria EN SISTEMAS DE GESTION CERTIFICABLESDocument39 pagesINFORME Auditoria EN SISTEMAS DE GESTION CERTIFICABLESsebastian olivares100% (1)
- SWP1198Document23 pagesSWP1198Xuân HoằngNo ratings yet
- Hoc Bong FulbrightDocument5 pagesHoc Bong FulbrightXuân HoằngNo ratings yet
- Bài Tập Thực Tập Tiện Đại Cương 1Document1 pageBài Tập Thực Tập Tiện Đại Cương 1Xuân HoằngNo ratings yet
- VV 0820 15Document6 pagesVV 0820 15Xuân HoằngNo ratings yet
- 1. Khái Niệm.: Mục LụcDocument26 pages1. Khái Niệm.: Mục LụcXuân HoằngNo ratings yet
- Kyõ Thuaät Baøo - Xoïc: Tröôøng Ñaïi Hoïc Baùch Khoa TP - HCM Khoa Cô Khí Ban Giaûng Daïy Thöïc HaønhDocument20 pagesKyõ Thuaät Baøo - Xoïc: Tröôøng Ñaïi Hoïc Baùch Khoa TP - HCM Khoa Cô Khí Ban Giaûng Daïy Thöïc HaønhXuân HoằngNo ratings yet
- Khoa Cô Khí Moân Hoïc Thöïc Taäp Cơ Khi Đại Cương Ban Gdth Baøi taäp NGUỘI Soá: Teân baøi taäp: Khoùa mieäng Thôøi gian thöïc hieän: tiếtDocument2 pagesKhoa Cô Khí Moân Hoïc Thöïc Taäp Cơ Khi Đại Cương Ban Gdth Baøi taäp NGUỘI Soá: Teân baøi taäp: Khoùa mieäng Thôøi gian thöïc hieän: tiếtXuân HoằngNo ratings yet
- 72 Part2 RobotDynamicsDocument30 pages72 Part2 RobotDynamicsXuân HoằngNo ratings yet
- 81 Part1 PathPlanningDocument35 pages81 Part1 PathPlanningXuân HoằngNo ratings yet
- 82 Part2 TrajectoryGenerationDocument52 pages82 Part2 TrajectoryGenerationXuân HoằngNo ratings yet
- 3 Spatial Description TransformationDocument77 pages3 Spatial Description TransformationXuân HoằngNo ratings yet
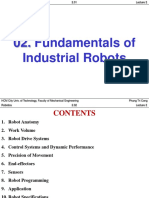
- 2 Fundamental Industrial RobotDocument83 pages2 Fundamental Industrial RobotXuân HoằngNo ratings yet
- Linear Control of ManipulatorsDocument55 pagesLinear Control of ManipulatorsXuân HoằngNo ratings yet
- 4 Forward KinematicsDocument53 pages4 Forward KinematicsXuân HoằngNo ratings yet
- 71 Part1 MotionDynamicsDocument30 pages71 Part1 MotionDynamicsXuân HoằngNo ratings yet
- Witches Loaves Analysis PrejudiceDocument2 pagesWitches Loaves Analysis PrejudiceNaveenGowdaBangloreNo ratings yet
- Comunicado Vacante Asistente Well Testing - JACDocument2 pagesComunicado Vacante Asistente Well Testing - JACJose Manuel Meriño MartinezNo ratings yet
- Hero Honda - M&a Lab - March 15, 2011Document24 pagesHero Honda - M&a Lab - March 15, 2011Tze HoeNo ratings yet
- Thème: Projet de Fin D'études Pour L'obtention Du Diplôme de MasterDocument44 pagesThème: Projet de Fin D'études Pour L'obtention Du Diplôme de MasterMostafa BettaharNo ratings yet
- U6 Electricidad ActividadesDocument19 pagesU6 Electricidad ActividadesjavicarpsNo ratings yet
- Alfred Rosenberg's MemoirsDocument119 pagesAlfred Rosenberg's MemoirsSir Robin of LoxleyNo ratings yet
- Cálculo Hidráulico de La Línea de AducciónDocument5 pagesCálculo Hidráulico de La Línea de AducciónAntonio Soto LeonNo ratings yet
- Combinar Correspondencia 2007 PDFDocument12 pagesCombinar Correspondencia 2007 PDFBoavitaBoyacáNo ratings yet
- Arduino Micro QuadcopterDocument5 pagesArduino Micro QuadcopterA Lo mejorNo ratings yet
- Electric Charges and Fields MCQ Class 12 Physics Chapter 1Document8 pagesElectric Charges and Fields MCQ Class 12 Physics Chapter 1suousNo ratings yet
- ENTREMÉS Navidad (Baja)Document68 pagesENTREMÉS Navidad (Baja)Cristina CostaNo ratings yet
- Biosphere Vector Control Bahan Kuliah OnlnineDocument21 pagesBiosphere Vector Control Bahan Kuliah OnlnineFikri AlghifariNo ratings yet
- Presentation of Godrej CompanyDocument15 pagesPresentation of Godrej CompanyRiya TopiwalaNo ratings yet
- Lecture 13 - Lumber GradingDocument20 pagesLecture 13 - Lumber GradingimanolkioNo ratings yet
- Workbook Certificacion ADSDocument23 pagesWorkbook Certificacion ADSJoseph Antonio Apaza GómezNo ratings yet
- Folleto Sistema Globalmente ArmonizadoDocument3 pagesFolleto Sistema Globalmente ArmonizadoLuisNo ratings yet
- Tipos y Metodos de Mezcla Asfaltica y EnsayosDocument17 pagesTipos y Metodos de Mezcla Asfaltica y EnsayosGuillermo Solis PedrazaNo ratings yet
- Catalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoDocument78 pagesCatalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoAlexis SanchezNo ratings yet
- Heliga Birgitta - UppenbarelsenDocument332 pagesHeliga Birgitta - UppenbarelsenPaulo FeliceNo ratings yet
- 1 Chapitre 4 Barrages-VoutesDocument10 pages1 Chapitre 4 Barrages-VoutesFatima zahra BerakheliNo ratings yet
- Assignment#1: Water Engineering CEE-307Document7 pagesAssignment#1: Water Engineering CEE-307Muhammad ShahzaibNo ratings yet
- Física SolucionarioDocument10 pagesFísica SolucionarioGhilmar Jhonnathan Canchari RivasNo ratings yet
- Hoja de Valoración SOTGDocument1 pageHoja de Valoración SOTGLaura MahugoNo ratings yet
- Cap 7 Osciloscopio y Generador de SenalesDocument19 pagesCap 7 Osciloscopio y Generador de SenalesbelenNo ratings yet
- R & D English GeneralBook 2009Document40 pagesR & D English GeneralBook 2009Suman Kakkirala100% (1)
- Lampara de Emergencia PDFDocument1 pageLampara de Emergencia PDFMarvin CuyunNo ratings yet