You might also like
- The Lightworker's HandbookDocument58 pagesThe Lightworker's HandbookEvgeniq Marcenkova100% (9)
- Visual Perception Lab PDFDocument12 pagesVisual Perception Lab PDFJulie TylerNo ratings yet
- Fuzzy Reduced Order Observer-Controller Design For Biomechanical Sit-to-Stand MovementDocument6 pagesFuzzy Reduced Order Observer-Controller Design For Biomechanical Sit-to-Stand Movementnadia.imranNo ratings yet
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerDocument6 pages2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATNo ratings yet
- A Wearable Robotic Arm With High Force-Reflection CapabilityDocument6 pagesA Wearable Robotic Arm With High Force-Reflection CapabilityVishal BorateNo ratings yet
- Novel Postural Control Algorithm For Control of Multifunctional Myoelectric Prosthetic HandsDocument18 pagesNovel Postural Control Algorithm For Control of Multifunctional Myoelectric Prosthetic HandsJuan sebastian lopez escobarNo ratings yet
- Applied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationDocument16 pagesApplied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationKAREN DAYANA TRUJILLO BARRIOSNo ratings yet
- Control of Leg Movements Driven by Electrically Stimulated MusclesDocument7 pagesControl of Leg Movements Driven by Electrically Stimulated MusclesBounty JhaNo ratings yet
- JP - 13Upper-Limb Powered Exoskeleton DesignDocument10 pagesJP - 13Upper-Limb Powered Exoskeleton DesignCostinel BogheanuNo ratings yet
- Body-Assisted Arm Movement Control For Human-Like Object ManipulationDocument3 pagesBody-Assisted Arm Movement Control For Human-Like Object ManipulationKadir CumaliNo ratings yet
- Used HydraulicDocument6 pagesUsed HydraulicIz CareyNo ratings yet
- Decoding Arm Movements by Myoeletric Signals and Artificial Neural NetworksDocument6 pagesDecoding Arm Movements by Myoeletric Signals and Artificial Neural NetworksAnurag SharmaNo ratings yet
- Myoelectric Control Strategies For Rehabilitation RobotsDocument17 pagesMyoelectric Control Strategies For Rehabilitation Robotsmb.farooqui02No ratings yet
- Active Impedance Control of A Lower Limb Exoskeleton To Assist Sit-to-Stand MovementDocument7 pagesActive Impedance Control of A Lower Limb Exoskeleton To Assist Sit-to-Stand MovementAkim KbNo ratings yet
- 3-D Anatomically Based Dynamic Modeling of The Human Knee To Include Tibio-Femoral and Patello-Femoral JointsDocument10 pages3-D Anatomically Based Dynamic Modeling of The Human Knee To Include Tibio-Femoral and Patello-Femoral JointsAki NikNo ratings yet
- Mechatronics: Giho Jang, Chulwoo Lee, Hoyul Lee, Youngjin ChoiDocument8 pagesMechatronics: Giho Jang, Chulwoo Lee, Hoyul Lee, Youngjin ChoiebrahimpanNo ratings yet
- Algorithm For The Arm of Humanoid RobotDocument5 pagesAlgorithm For The Arm of Humanoid RobotFarah yazidNo ratings yet
- Journal of Biomechanics: Seyyed Arash Haghpanah, Farzam Farahmand, Hassan ZohoorDocument9 pagesJournal of Biomechanics: Seyyed Arash Haghpanah, Farzam Farahmand, Hassan ZohoorCamila HenaoNo ratings yet
- Accepted Manuscript: Lelai Zhou Yibin Li Shaoping BaiDocument32 pagesAccepted Manuscript: Lelai Zhou Yibin Li Shaoping BaiZehra ÇİFCİBAŞINo ratings yet
- 10 1 1 16 1900 PDFDocument15 pages10 1 1 16 1900 PDFJisha KuruvillaNo ratings yet
- A Global Human Walking Model With Real-Time Kinematic PersonificationDocument21 pagesA Global Human Walking Model With Real-Time Kinematic PersonificationYoke AdlanNo ratings yet
- Design of Shape Memory Alloy-Based and Tendon-DrivDocument6 pagesDesign of Shape Memory Alloy-Based and Tendon-DrivFranck LeonelNo ratings yet
- Experiments and Kinematics Analysis of A Hand RehaDocument8 pagesExperiments and Kinematics Analysis of A Hand RehaEbenezer MarteyNo ratings yet
- The Control of A Lower Limb Exoskeleton For Gait Rehabilitation: A Hybrid Active Force Control ApproachDocument8 pagesThe Control of A Lower Limb Exoskeleton For Gait Rehabilitation: A Hybrid Active Force Control ApproachMian AsimNo ratings yet
- A Wavelet-Based Method To Predict Muscle Forces From Surface Electromyography Signals in WeightliftingDocument11 pagesA Wavelet-Based Method To Predict Muscle Forces From Surface Electromyography Signals in WeightliftingRommel AndresNo ratings yet
- Comparative Study of Three Human Muscle Models: Rasha MassoudDocument4 pagesComparative Study of Three Human Muscle Models: Rasha MassoudÓscar Juan Fernández BellónNo ratings yet
- Modeling, Simulation and Control of Prosthetic Hand Using SimmechanicsDocument7 pagesModeling, Simulation and Control of Prosthetic Hand Using SimmechanicsJose Luis SarmientoNo ratings yet
- A Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelDocument11 pagesA Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelMannanHarshaNo ratings yet
- Zadravc Planar Arm Trajectory OptimizationDocument13 pagesZadravc Planar Arm Trajectory OptimizationSeddik KhemaissiaNo ratings yet
- Classification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmDocument4 pagesClassification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmMushfiqur Rahman JimNo ratings yet
- Electromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyDocument5 pagesElectromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyPhan Nguyễn Quy NhơnNo ratings yet
- Kinematic Motion Analysis of The Human Arm During A Manipulation TaskDocument7 pagesKinematic Motion Analysis of The Human Arm During A Manipulation TaskPedro RoyuelaNavarroNo ratings yet
- Design of A 7 Degree-of-Freedom Upper-Limb Powered ExoskeletonDocument6 pagesDesign of A 7 Degree-of-Freedom Upper-Limb Powered Exoskeletonfaizar_2No ratings yet
- 2004 NEOSYS-Sistema EspecialistaAuxilioDecisaoNeonatologiaDocument10 pages2004 NEOSYS-Sistema EspecialistaAuxilioDecisaoNeonatologiaademargcjuniorNo ratings yet
- Assessing Assumptions in Kinematic Hand Models: A Review: June 2012Document9 pagesAssessing Assumptions in Kinematic Hand Models: A Review: June 2012ranitaNo ratings yet
- Targeted Muscle Reinnervation For Real-Time Myoelectric Control of Multifunction Artificial ArmsDocument10 pagesTargeted Muscle Reinnervation For Real-Time Myoelectric Control of Multifunction Artificial ArmsSahana RangarajanNo ratings yet
- Novel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionDocument22 pagesNovel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionAlemeNo ratings yet
- AI Asgmnt5Document3 pagesAI Asgmnt5Ahmad Razin JasmiNo ratings yet
- Power Grasping of A Prosthetic Hand Based Upon Virtual Spring-Damper HypothesisDocument8 pagesPower Grasping of A Prosthetic Hand Based Upon Virtual Spring-Damper Hypothesismarchicue2016No ratings yet
- MainDocument6 pagesMainDenis MosconiNo ratings yet
- A Novel Method For Elbow Joint Continuous Prediction Using EMG and Musculoskeletal ModelDocument6 pagesA Novel Method For Elbow Joint Continuous Prediction Using EMG and Musculoskeletal ModelWalid A. SayssoukNo ratings yet
- Muscle Force Distribution For Adaptive Control of A Humanoid Robot Arm With Redundant Bi-Articular and Mono-Articular Muscle MechanismDocument11 pagesMuscle Force Distribution For Adaptive Control of A Humanoid Robot Arm With Redundant Bi-Articular and Mono-Articular Muscle MechanismpaperopenaccessNo ratings yet
- Application of Nonlinear Model Predictive Controller For Fes-Assisted Standing Up in ParaplegiaDocument4 pagesApplication of Nonlinear Model Predictive Controller For Fes-Assisted Standing Up in Paraplegiarufaida2No ratings yet
- ACT Mechanism ToMDocument12 pagesACT Mechanism ToMMuhammad Zain NawwarNo ratings yet
- Human Gait Analysed by An Artificial Neural Network ModelDocument4 pagesHuman Gait Analysed by An Artificial Neural Network Modelstroci4047No ratings yet
- Design of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemDocument11 pagesDesign of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemNors NoorNo ratings yet
- S Poel Stra 2000Document13 pagesS Poel Stra 2000macNo ratings yet
- Flash e Hogan (1985) PDFDocument16 pagesFlash e Hogan (1985) PDFDunga PessoaNo ratings yet
- Cocontraccion en Miembro ResidualDocument9 pagesCocontraccion en Miembro ResidualKarolina Quintana HermosillaNo ratings yet
- Learning Dynamics of Reaching: Reza Shadmehr, Opher Donchin, Eun-Jung Hwang, Sarah E. Hemminger, and Ashwini K. RaoDocument32 pagesLearning Dynamics of Reaching: Reza Shadmehr, Opher Donchin, Eun-Jung Hwang, Sarah E. Hemminger, and Ashwini K. RaoAmul PandyaNo ratings yet
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDocument4 pagesUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruNo ratings yet
- Ex Mental Bran Research: Spatial Control of Arm MovementsDocument5 pagesEx Mental Bran Research: Spatial Control of Arm MovementsJohn FiveNo ratings yet
- Application of EMG Signals For ControlliDocument6 pagesApplication of EMG Signals For Controlliashwin321501No ratings yet
- Human Sit-to-Stand Transfer Modeling For Optimal Control of Assistive RobotsDocument7 pagesHuman Sit-to-Stand Transfer Modeling For Optimal Control of Assistive Robotsnadia.imranNo ratings yet
- Impedance Characteristic of The Human Arm During Passive MovementsDocument7 pagesImpedance Characteristic of The Human Arm During Passive MovementsIAES IJAINo ratings yet
- Jucs 17 03 0349 0376 BaldassarriDocument28 pagesJucs 17 03 0349 0376 BaldassarriGaurav UpaNo ratings yet
- Maurel Et Al. - 2002 - A Biomechanical Musculoskeletal Model of Human Upper Limb For Dynamic SimulationDocument16 pagesMaurel Et Al. - 2002 - A Biomechanical Musculoskeletal Model of Human Upper Limb For Dynamic SimulationkoushikbakshiNo ratings yet
- Modelling, Design, and Construction of A Wrist Rehabilitation ExoskeletonDocument9 pagesModelling, Design, and Construction of A Wrist Rehabilitation Exoskeletonjuan sebastian avila diazNo ratings yet
- Dynamic Model of Anthropomorphic Robotics Finger MechanismsDocument5 pagesDynamic Model of Anthropomorphic Robotics Finger MechanismsKelsey RyanNo ratings yet
- (128-137) A.Salam Al-AmmriDocument10 pages(128-137) A.Salam Al-Ammribahaa03No ratings yet
- Musculo-Skeletal Modelling of The ShoulderDocument41 pagesMusculo-Skeletal Modelling of The ShoulderJohn BruzzoNo ratings yet
- Enhanced Double Exponential Reaching Law Based Sliding Mode Controller For Induction Motor DrivesDocument6 pagesEnhanced Double Exponential Reaching Law Based Sliding Mode Controller For Induction Motor DrivesAditi KarvekarNo ratings yet
- Distributed Generator in Grid-Connected Mode Using Improved Exponential Sliding Mode ControlDocument6 pagesDistributed Generator in Grid-Connected Mode Using Improved Exponential Sliding Mode ControlAditi KarvekarNo ratings yet
- Design of Bi-Power Reaching Law Sliding Mode Controller Based On Exponential ObserverDocument5 pagesDesign of Bi-Power Reaching Law Sliding Mode Controller Based On Exponential ObserverAditi KarvekarNo ratings yet
- Sliding Mode Control of The Optoelectronic Stabilized Platform Based On The Exponential Approach LawDocument4 pagesSliding Mode Control of The Optoelectronic Stabilized Platform Based On The Exponential Approach LawAditi KarvekarNo ratings yet
- The Exponential Reaching Law Sliding Mode Control of Magnetic Levitation SystemDocument4 pagesThe Exponential Reaching Law Sliding Mode Control of Magnetic Levitation SystemAditi KarvekarNo ratings yet
- A New Exponential Reaching Law of Sliding Mode Control To Improve Performance of Permanent Magnet Synchronous MotorDocument4 pagesA New Exponential Reaching Law of Sliding Mode Control To Improve Performance of Permanent Magnet Synchronous MotorAditi KarvekarNo ratings yet
- SY - M - Tech - Power System - AY - 2023 - 24Document34 pagesSY - M - Tech - Power System - AY - 2023 - 24Aditi KarvekarNo ratings yet
- 1 s2.0 S1018363921000428 MainDocument7 pages1 s2.0 S1018363921000428 MainAditi KarvekarNo ratings yet
- FY MTech Power System 2023-24 Syllabus Scanned Copy With SignDocument63 pagesFY MTech Power System 2023-24 Syllabus Scanned Copy With SignAditi KarvekarNo ratings yet
- Anime Neon Vibes Marketing PlanDocument62 pagesAnime Neon Vibes Marketing PlanAL - HusainNo ratings yet
- Essentials Lab Resource Guide 12 22Document67 pagesEssentials Lab Resource Guide 12 22Aijeleth Shahar Gunay AwacayNo ratings yet
- K ServerDocument11 pagesK Serveraryatel26No ratings yet
- Principles of Christian Mental HealthDocument27 pagesPrinciples of Christian Mental HealthMaschil100% (2)
- Generator Breaker Equipped With Vacuum InterruptersDocument4 pagesGenerator Breaker Equipped With Vacuum InterruptersVenna Karthik ReddyNo ratings yet
- Nasib Ahmad Faqirzada Resume CVDocument4 pagesNasib Ahmad Faqirzada Resume CVNasib Ahmad FaqirzadaNo ratings yet
- The LEGO Adventure BookDocument194 pagesThe LEGO Adventure BookBenjamin De AlexandrisNo ratings yet
- The Long Term Family Survival Course v5Document323 pagesThe Long Term Family Survival Course v5António Manuel de MoraisNo ratings yet
- Cbi Hortonsphere Rev6 LoresDocument8 pagesCbi Hortonsphere Rev6 LoresJuan P RuizNo ratings yet
- Case Studies On Environmental Due Diligence English VersionDocument43 pagesCase Studies On Environmental Due Diligence English Versionsatarupa BandyopadhyayNo ratings yet
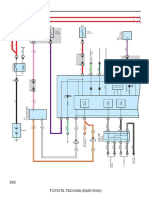
- Combination Meter: 262 Toyota Tacoma (Em01D0U)Document6 pagesCombination Meter: 262 Toyota Tacoma (Em01D0U)hamayunNo ratings yet
- Assessing The Feasibility of Achieving Functional Recovery Goals Through Seismic Retrofit of Existing Reinforced Concrete BuildingsEarthquake SpectraDocument29 pagesAssessing The Feasibility of Achieving Functional Recovery Goals Through Seismic Retrofit of Existing Reinforced Concrete BuildingsEarthquake SpectraRay CTNo ratings yet
- EditDocument64 pagesEditHagenimana ErnestNo ratings yet
- Intech Brachytherapy Shielding Materials Guide 2021-01Document3 pagesIntech Brachytherapy Shielding Materials Guide 2021-01Kevin DrummNo ratings yet
- XY Plotter V2.0 Laser Engraver Upgrade Pack User Guide MDraw Version 1.0Document41 pagesXY Plotter V2.0 Laser Engraver Upgrade Pack User Guide MDraw Version 1.0franklinNo ratings yet
- CHARCUTERIE and FORCEMEATDocument4 pagesCHARCUTERIE and FORCEMEATCheska PatduNo ratings yet
- Seds QuizDocument5 pagesSeds QuizKaruNo ratings yet
- UNIT 1-PHY 131 Chapter 2 - Introduction To VectorsDocument35 pagesUNIT 1-PHY 131 Chapter 2 - Introduction To VectorscharlieNo ratings yet
- A Bank Is A Financial Institution That Serves As A Financial IntermediaryDocument12 pagesA Bank Is A Financial Institution That Serves As A Financial IntermediaryShubhankar SoniNo ratings yet
- I. Preparation: Lesson 2 Concept of Ecosystem Intended Learning OutcomeDocument17 pagesI. Preparation: Lesson 2 Concept of Ecosystem Intended Learning OutcomeLeslie ObisoNo ratings yet
- 中國成語Document19 pages中國成語Nguyễn HiềnNo ratings yet
- 1597752113B.Tech Course StructureDocument2 pages1597752113B.Tech Course StructureMani DhamodharanNo ratings yet
- L4 - Structure of Metals - EMPDocument8 pagesL4 - Structure of Metals - EMPkopkash123No ratings yet
- SanyyoGroup - Stone Crusher Plant 200 TPHDocument7 pagesSanyyoGroup - Stone Crusher Plant 200 TPHBagas Somporn Supriadi PutraNo ratings yet
- Car Parking ReportDocument202 pagesCar Parking ReportIlmtalabNo ratings yet
- Horn AntennasDocument29 pagesHorn AntennasAbderrahmane BadisNo ratings yet
- CH 5 MatlabDocument77 pagesCH 5 MatlabAqib AliNo ratings yet
- Product Guide: FeaturesDocument24 pagesProduct Guide: FeaturesWesleyNo ratings yet