You might also like
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- GP PaperDocument2 pagesGP Paperpankajchauhaan02No ratings yet
- Notes Polar Coords 2Document16 pagesNotes Polar Coords 2gina tenquistNo ratings yet
- Working:: Ib Mathematics SL TOPIC: Vectors Vector Algebra 1Document17 pagesWorking:: Ib Mathematics SL TOPIC: Vectors Vector Algebra 1Ma XóNo ratings yet
- Sajc 2019 BT2 P1Document5 pagesSajc 2019 BT2 P1matcha iscreamNo ratings yet
- CAED KJHA 2d TransformationDocument114 pagesCAED KJHA 2d TransformationAnu SinghNo ratings yet
- 1) GivenDocument11 pages1) Givenibrahim fadelNo ratings yet
- CAD GM KJHA 2d TransformationDocument91 pagesCAD GM KJHA 2d TransformationAnu SinghNo ratings yet
- Straight Lines Class 12Document76 pagesStraight Lines Class 12technical swaroopNo ratings yet
- MS Qe 2004 Paper 1Document5 pagesMS Qe 2004 Paper 1api-25887606No ratings yet
- CP2 - Paper 2Document3 pagesCP2 - Paper 2prashasti0410No ratings yet
- C X X KX DX X X: Answer All QuestionsDocument2 pagesC X X KX DX X X: Answer All QuestionsMuhammad Redzuan SaidiNo ratings yet
- Lecture 9: Matrix Operations For OpenglDocument71 pagesLecture 9: Matrix Operations For Openglfrank musaNo ratings yet
- Vectors - Lessons - Part ADocument14 pagesVectors - Lessons - Part AAnthony Benson100% (1)
- Final Revision For GR-10 Ay 21-22Document24 pagesFinal Revision For GR-10 Ay 21-22Sarthak АlurkarNo ratings yet
- HOMEWORK #02 - Principal Angle-Unit Circle-Definition of Sine and Cosine On Unit CircleDocument4 pagesHOMEWORK #02 - Principal Angle-Unit Circle-Definition of Sine and Cosine On Unit CirclemonsieurlapaditeNo ratings yet
- Unit - III 2D-TransformationDocument48 pagesUnit - III 2D-Transformationpankajchandre30No ratings yet
- Form 4 59 Matrices and TransformationDocument23 pagesForm 4 59 Matrices and Transformationiminathi ndlovuNo ratings yet
- Unit 2 - Part 1Document74 pagesUnit 2 - Part 1A1FA MSKNo ratings yet
- Circle JEE Advanced DTS - 5Document1 pageCircle JEE Advanced DTS - 5IMMIDISETTI MOHAN RAONo ratings yet
- Tutorial 4 2016-2017Document2 pagesTutorial 4 2016-2017John FlavianNo ratings yet
- RG CW 14Document7 pagesRG CW 14Roy VeseyNo ratings yet
- LA-22-unt3-Classwork ProblemDocument3 pagesLA-22-unt3-Classwork ProblemPranathi PraveenNo ratings yet
- 2019 JC1 H2 Math Rev D - Graphs and Transformations - SolutionsDocument10 pages2019 JC1 H2 Math Rev D - Graphs and Transformations - SolutionscalderteoNo ratings yet
- Exercise 2Document4 pagesExercise 2braziserver0987No ratings yet
- Wakissha Mock 1 2016Document3 pagesWakissha Mock 1 2016Kwomu JosephNo ratings yet
- It Is Given That The Line: y Ax BXC DX Xe A B D eDocument5 pagesIt Is Given That The Line: y Ax BXC DX Xe A B D eChan RicNo ratings yet
- CGR U3T2 3 Presentation10Document18 pagesCGR U3T2 3 Presentation10Kaiwalya MatreNo ratings yet
- QCProblems PDFDocument164 pagesQCProblems PDFDAVIDNo ratings yet
- (Total 6 Marks) : IB Questionbank Mathematics Higher Level 3rd Edition 1Document146 pages(Total 6 Marks) : IB Questionbank Mathematics Higher Level 3rd Edition 1Keya SanghviNo ratings yet
- HCI H2 2021 Prelim P2 QNDocument6 pagesHCI H2 2021 Prelim P2 QNCheesy ONENo ratings yet
- Spatial Descriptions and Transformation: (Chapter 2)Document59 pagesSpatial Descriptions and Transformation: (Chapter 2)Tooba Sami ArifeenNo ratings yet
- CST 304 - Computer Graphics: 2D TransformationsDocument34 pagesCST 304 - Computer Graphics: 2D TransformationsMalu VavuNo ratings yet
- Year 12 Term 2 Assessment 2007 - EXTENSION II: Question 2 (B) Continued On Next PageDocument3 pagesYear 12 Term 2 Assessment 2007 - EXTENSION II: Question 2 (B) Continued On Next Pagenoah smithNo ratings yet
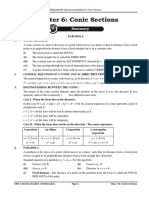
- Conic Section - SummaryDocument16 pagesConic Section - Summarymehakgarg2k5No ratings yet
- MQP Ans 02Document9 pagesMQP Ans 02agrawalvidhesh0No ratings yet
- Booklet FINAL PARABOLA PDFDocument49 pagesBooklet FINAL PARABOLA PDFDhruv ModiNo ratings yet
- 5 TransformationsDocument66 pages5 TransformationsPratik MalviyaNo ratings yet
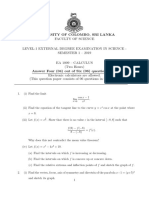
- EA 1009 - 2019 Past PaperDocument4 pagesEA 1009 - 2019 Past Paperdamith galagedaraNo ratings yet
- Co-Ordinate Geometry: 2 Change of AxesDocument22 pagesCo-Ordinate Geometry: 2 Change of AxesPrantoNo ratings yet
- Ptu B.tech 1 Math2 2015Document2 pagesPtu B.tech 1 Math2 2015AmanNo ratings yet
- PM FM 5Document2 pagesPM FM 5biloma6323No ratings yet
- 06 TransformationDocument56 pages06 TransformationMuntasir FahimNo ratings yet
- 2D Transformations: Computer GraphicsDocument25 pages2D Transformations: Computer Graphicssmile067No ratings yet
- Std. 10th Board Question Paper Maths Part II - Mar 2023 - 6411b0300cdeeDocument4 pagesStd. 10th Board Question Paper Maths Part II - Mar 2023 - 6411b0300cdeeSwapnilNo ratings yet
- 3 TransformationsDocument33 pages3 TransformationsSakshi NailwalNo ratings yet
- Section12 8notesDocument18 pagesSection12 8noteskprk414No ratings yet
- Grade: A2 August 20, 2021 Time: 45 Min. Differentiation (P3) Class - TestDocument2 pagesGrade: A2 August 20, 2021 Time: 45 Min. Differentiation (P3) Class - TestUttam PathakNo ratings yet
- Comb W Book-2Parab Ellip HypDocument18 pagesComb W Book-2Parab Ellip Hypuser 12No ratings yet
- Model-A MathsDocument32 pagesModel-A Mathskarthikaanand680No ratings yet
- Chapter 4 - 2 - Dimensional Geometric TransformationsDocument31 pagesChapter 4 - 2 - Dimensional Geometric TransformationsTanveer Ahmed HakroNo ratings yet
- Worksheet Chapter 4Document15 pagesWorksheet Chapter 4Mitul HariyaniNo ratings yet
- 2018 SAJC H2 Prelim P1 + SolutionDocument20 pages2018 SAJC H2 Prelim P1 + Solutiontoh tim lamNo ratings yet
- Mid Sem Papaer - RoboticsDocument2 pagesMid Sem Papaer - RoboticsshubhamNo ratings yet
- Attempt All The Questions in Given Order. (3) Attempt All Parts of Each Question at One PlaceDocument2 pagesAttempt All The Questions in Given Order. (3) Attempt All Parts of Each Question at One PlaceVaisnavi VNo ratings yet
- G11 Add Maths P2Document18 pagesG11 Add Maths P2Trevor G. SamarooNo ratings yet
- Analytical GeometryDocument3 pagesAnalytical Geometrypeterkenga77No ratings yet
- Cssa - NSW Cssa - NSW Cssa - NSW: 4 Unit MathematicsDocument4 pagesCssa - NSW Cssa - NSW Cssa - NSW: 4 Unit MathematicsDharniNo ratings yet
- Polynomials For Class 10Document15 pagesPolynomials For Class 10Swachhand Shashi100% (1)
- 2018 JC2 H2 Maths SA2 Hwa Chong InstitutionDocument44 pages2018 JC2 H2 Maths SA2 Hwa Chong InstitutionZtolenstarNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkFrom EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkRating: 5 out of 5 stars5/5 (1)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)