You might also like
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- CT Testing Kit Tettex t2767-FcDocument8 pagesCT Testing Kit Tettex t2767-Fcdhanasekaran19731945No ratings yet
- A2 38+thermal+modellingDocument57 pagesA2 38+thermal+modellingblem_0075No ratings yet
- Fault Analysis On LVDocument15 pagesFault Analysis On LVVENKATESAN RNo ratings yet
- EEE373 Text Book Prof DR Emin TacerDocument136 pagesEEE373 Text Book Prof DR Emin TacerTareq SelaaNo ratings yet
- CT and PTDocument3 pagesCT and PTrk_mbdNo ratings yet
- CL-NG-6460-002-030 Checklist For Metal Enclosed Bus Duct Rev00Document3 pagesCL-NG-6460-002-030 Checklist For Metal Enclosed Bus Duct Rev00Santhosh Kumar VinayagamNo ratings yet
- Electric Power CablesDocument6 pagesElectric Power CablesVENKATESAN RNo ratings yet
- Failures of Pedestal-Type (Pin and Cap) InsulatorsDocument2 pagesFailures of Pedestal-Type (Pin and Cap) InsulatorsJosé SánchezNo ratings yet
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaNo ratings yet
- Power Quality TechniquesDocument9 pagesPower Quality TechniquesS Bharadwaj ReddyNo ratings yet
- Application Guide For TRV For High-Voltage Circuit Breakers PDFDocument39 pagesApplication Guide For TRV For High-Voltage Circuit Breakers PDFsorry2qazNo ratings yet
- IXYS Igbt - Rectifiermodules PDFDocument32 pagesIXYS Igbt - Rectifiermodules PDFchidambaram kasiNo ratings yet
- 1 FailureDocument80 pages1 FailureSunil SinghNo ratings yet
- Space VectorDocument5 pagesSpace VectorSatya Kumar NgvNo ratings yet
- 04 Fault CalculationsDocument31 pages04 Fault CalculationsRatheesh KumarNo ratings yet
- Trafo Spec PDFDocument56 pagesTrafo Spec PDFMohammad Fadhil KoesputraNo ratings yet
- (Susol MCCB) Catalog en 202107Document376 pages(Susol MCCB) Catalog en 202107paryonoNo ratings yet
- Capacitors: Schematic Symbols +Document5 pagesCapacitors: Schematic Symbols +lam9021No ratings yet
- Grain Oriented Electrical Steels: M-2, M-3, M-3X Lite Carlite Goes M-2, M-3, M-4, M-5, M-6 Mill-Anneal GoesDocument47 pagesGrain Oriented Electrical Steels: M-2, M-3, M-3X Lite Carlite Goes M-2, M-3, M-4, M-5, M-6 Mill-Anneal GoesLucio PereiraNo ratings yet
- 1MRS756966 General CT Dimensioning Guide - ENbDocument26 pages1MRS756966 General CT Dimensioning Guide - ENbsivaguruk2No ratings yet
- Synchronous Machine Parameter Measurement: Poles F NDocument9 pagesSynchronous Machine Parameter Measurement: Poles F NRitesh BhattNo ratings yet
- 3 Phase Delta SystemDocument2 pages3 Phase Delta SystemcbalavivekanandanNo ratings yet
- Selecting CT ClassDocument4 pagesSelecting CT ClassdskymaximusNo ratings yet
- NRS 048 Robert Koch11-02Document8 pagesNRS 048 Robert Koch11-02Adrian MorenoNo ratings yet
- Current TransformersDocument7 pagesCurrent Transformersmn_sundaraamNo ratings yet
- HT Switchgear RequirementsDocument22 pagesHT Switchgear Requirementskankw879No ratings yet
- Site Test Report Ng-Sa Name of Substation: Al-Tawdihiyah 132/33KV SubstationDocument7 pagesSite Test Report Ng-Sa Name of Substation: Al-Tawdihiyah 132/33KV SubstationSyed Abbas100% (1)
- 01 Generators - P33 Data Sheet-2 PDFDocument4 pages01 Generators - P33 Data Sheet-2 PDFAnonymous Jcr1ES8QYuNo ratings yet
- Zero Sequence DiagramDocument2 pagesZero Sequence DiagramVerukv007No ratings yet
- Transient Suppression Devices and PrinciplesDocument8 pagesTransient Suppression Devices and Principleskunalbhavsar1No ratings yet
- Current PulsationDocument12 pagesCurrent Pulsationtopazamp123No ratings yet
- Transformers ConnectionsDocument6 pagesTransformers Connectionsgeorgel1980No ratings yet
- Class07 Using Transmission LinesDocument24 pagesClass07 Using Transmission LinesVikram Raj SinghNo ratings yet
- On Modelling Iron Core NonlinearitiesDocument9 pagesOn Modelling Iron Core Nonlinearitiesjdjjarami100% (1)
- Earthing & Equi Potential BondingDocument27 pagesEarthing & Equi Potential BondingSDE BSS KollamNo ratings yet
- IEC 61850 For Power System Communication: Christoph Brunner, Member, IEEEDocument6 pagesIEC 61850 For Power System Communication: Christoph Brunner, Member, IEEEcastilho22No ratings yet
- Battery RoomDocument7 pagesBattery RoomIswadi Bin ZulkarnainNo ratings yet
- A2.24 Thermal PerformancesID55VER20Document15 pagesA2.24 Thermal PerformancesID55VER20Fajar Adi PrabowoNo ratings yet
- Power Quality Improvement by Using STATCOM Control PDFDocument11 pagesPower Quality Improvement by Using STATCOM Control PDFيوسف خضر النسورNo ratings yet
- Busbar Specification: Technical Specifications Voltage DropDocument1 pageBusbar Specification: Technical Specifications Voltage DropKanlaya ChungjutikulNo ratings yet
- A Comparative Study of IEC 76 and ANSI C57.12 On TransformersDocument9 pagesA Comparative Study of IEC 76 and ANSI C57.12 On TransformersprasannamohandasNo ratings yet
- GIS Vs AIS SubstationDocument2 pagesGIS Vs AIS SubstationVENKATESAN RNo ratings yet
- Equipment Damage Curves ConductorsDocument8 pagesEquipment Damage Curves ConductorsBrenda Naranjo MorenoNo ratings yet
- Power InverterDocument11 pagesPower Inverterriz2010No ratings yet
- Modeling of Three-Winding Transformers PDFDocument20 pagesModeling of Three-Winding Transformers PDFGhislainNo ratings yet
- CTC Continuous Transposed Cable 2017 2 PDFDocument5 pagesCTC Continuous Transposed Cable 2017 2 PDFNishikanta MallickNo ratings yet
- TechRef Overhead Line Models PDFDocument29 pagesTechRef Overhead Line Models PDFRafat ThongNo ratings yet
- 80-85 Standards Relevant To Transformers - P. RamachandranDocument6 pages80-85 Standards Relevant To Transformers - P. RamachandranAnderson Jair Velandia PiraquiveNo ratings yet
- Symmetrical and Unsymmetrical Fault Currents of A Wind Power PlantDocument10 pagesSymmetrical and Unsymmetrical Fault Currents of A Wind Power PlantsquarehandsomeNo ratings yet
- Power and RMS Values of Fourier SeriesDocument9 pagesPower and RMS Values of Fourier Seriesahmetebeninami75% (4)
- M.g.say ch01Document5 pagesM.g.say ch01prabhjot singh150% (2)
- Sympathetic Inrush Current PhenomenonDocument8 pagesSympathetic Inrush Current PhenomenonEleazar Sierra EspinozaNo ratings yet
- Electrical Power Transformer. Theory, ProtectionDocument109 pagesElectrical Power Transformer. Theory, ProtectionAdeel ZafarNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- COA LAb File-ShubhiDocument28 pagesCOA LAb File-ShubhiKrishan Kant ShuklaNo ratings yet
- Grammar 111Document33 pagesGrammar 111Suntithvibol Sem100% (1)
- LAB 7 - Getting Started With Google BigQueryDocument10 pagesLAB 7 - Getting Started With Google BigQueryRama VNo ratings yet
- Cells Bio-120-Exercise-4Document7 pagesCells Bio-120-Exercise-4Paolo TenorioNo ratings yet
- USN 18CS654: B. E. Degree (Autonomous) Sixth Semester End Examination (SEE)Document2 pagesUSN 18CS654: B. E. Degree (Autonomous) Sixth Semester End Examination (SEE)Sarmi HarshaNo ratings yet
- Mac On FigDocument449 pagesMac On Figvuk_vucko_vukovicNo ratings yet
- Modern Age Waste Water ProblemsDocument364 pagesModern Age Waste Water Problemsromaehab201912No ratings yet
- Sri Chaitanya: KEY SheetDocument13 pagesSri Chaitanya: KEY SheetMODALAVALASA SRIHARSHANo ratings yet
- UNIT1-Demand Management in Supply Chain Demand Planning and ForecastingDocument20 pagesUNIT1-Demand Management in Supply Chain Demand Planning and Forecastingshenbha50% (2)
- Alarm ListDocument4 pagesAlarm ListMirela Perenda ŠabićNo ratings yet
- Chapter 8Document7 pagesChapter 8Maiane JunqueiraNo ratings yet
- SMS SRH-2D SedimentTransportDocument19 pagesSMS SRH-2D SedimentTransportthendyNo ratings yet
- DPP 01 Periodic Table JH Sir-3576 PDFDocument5 pagesDPP 01 Periodic Table JH Sir-3576 PDFChessNo ratings yet
- Purified Water Specification From European Pharmacopoeia Edition 8Document3 pagesPurified Water Specification From European Pharmacopoeia Edition 8puut100% (1)
- Power Off Reset Reason BackupDocument5 pagesPower Off Reset Reason Backupmohamed ahmedNo ratings yet
- Net Work Survey VehicleDocument26 pagesNet Work Survey VehiclegurvinderkumarNo ratings yet
- Abbott 2021 ApJL 915 L5Document24 pagesAbbott 2021 ApJL 915 L5Manju SanthakumariNo ratings yet
- Devlopment and Analysis of Natural Banana Fiber CompositeDocument3 pagesDevlopment and Analysis of Natural Banana Fiber CompositeEditor IJRITCCNo ratings yet
- The Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignDocument6 pagesThe Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignmewarulesNo ratings yet
- Lab ReportDocument5 pagesLab Reportivan glenn baldomerostNo ratings yet
- BMG Idle CatlogueDocument20 pagesBMG Idle Catloguechintan mistryNo ratings yet
- Condensation and BoilingDocument14 pagesCondensation and BoilingCrislyn Akilit Bayawa100% (1)
- IntegersDocument20 pagesIntegersMahobeNo ratings yet
- Simple MachinesDocument25 pagesSimple MachinesMay ArispeNo ratings yet
- Unit 1Document29 pagesUnit 1Biswajit MishraNo ratings yet
- Caie As Computer Science 9618 Theory v3Document20 pagesCaie As Computer Science 9618 Theory v3James HoangNo ratings yet
- Flue Gas Analysis in IndustryDocument150 pagesFlue Gas Analysis in Industryblack_knight728No ratings yet
- 1 - Classful Ip AddressingDocument6 pages1 - Classful Ip AddressingBiruk Tesfaye Legesse100% (1)
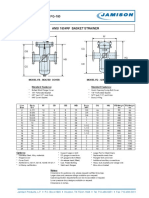
- FB-150 FQ-150 Basket StrainerDocument1 pageFB-150 FQ-150 Basket Strainerklich77No ratings yet
- Kou2003 PDFDocument6 pagesKou2003 PDFGe EffgenNo ratings yet