You might also like
- Chuong 3 - IO SignalsDocument21 pagesChuong 3 - IO SignalsTiến Đăng NguyễnNo ratings yet
- Backup Robots ABBDocument10 pagesBackup Robots ABBNguyen Van TrangNo ratings yet
- Chuong 1 Learning of BasicsDocument58 pagesChuong 1 Learning of BasicsTriều Nguyễn NgọcNo ratings yet
- Chuong 8 - Smart ComponentDocument20 pagesChuong 8 - Smart ComponentTiến Đăng NguyễnNo ratings yet
- Gia Cong Robot NXDocument16 pagesGia Cong Robot NXLe HuynhNo ratings yet
- ROBOT1Document26 pagesROBOT1Trần Lê Nguyên HãnNo ratings yet
- Giới thiệu về phần mềm mô phỏng ROBOTDocument25 pagesGiới thiệu về phần mềm mô phỏng ROBOTtruongtrongnhan.hauiNo ratings yet
- Sach LabVIEW - Bai 1 Gioi Thieu LabVIEWDocument14 pagesSach LabVIEW - Bai 1 Gioi Thieu LabVIEWNguyen Ba HaiNo ratings yet
- RobotDocument26 pagesRobotvietsinhcdtNo ratings yet
- DemoDocument14 pagesDemoTrọng QuảngNo ratings yet
- Báo Cáo Thực Hành Kỹ Thuật RobotDocument16 pagesBáo Cáo Thực Hành Kỹ Thuật Robotminhtrong1596No ratings yet
- Tieu Luan Robot Khop NoiDocument33 pagesTieu Luan Robot Khop NoiLý Chính ĐạoNo ratings yet
- AMA Nachi Robot Manual-VNDocument20 pagesAMA Nachi Robot Manual-VNduynx292No ratings yet
- BÁO CÁO THỰC HÀNH KỸ THUẬT ROBOTDocument16 pagesBÁO CÁO THỰC HÀNH KỸ THUẬT ROBOTtaolathudzdayNo ratings yet
- báo cáo sửa ngày LẦN 1Document24 pagesbáo cáo sửa ngày LẦN 1pqhung.dhcd15a2hnNo ratings yet
- Robot GapVaoThungDocument10 pagesRobot GapVaoThungtri2892002No ratings yet
- Thuc HanhDocument29 pagesThuc HanhĐông Ngô ThanhNo ratings yet
- Robot Đ ÁnDocument17 pagesRobot Đ ÁnGLong NguyễnNo ratings yet
- Android Chapter03 Life CycleDocument48 pagesAndroid Chapter03 Life CycleCam NhungNo ratings yet
- Giao Trình LogoDocument106 pagesGiao Trình Logotranngocthanh26092001No ratings yet
- TUTORIAL COSIMIR-đã chuyển đổiDocument57 pagesTUTORIAL COSIMIR-đã chuyển đổiphamilan0% (2)
- Đ Án ĐKTĐDocument14 pagesĐ Án ĐKTĐĐỗ HuyNo ratings yet
- All TN RobotDocument85 pagesAll TN Robotphamnhathao95No ratings yet
- Final ReportDocument89 pagesFinal ReportPhú NguyễnNo ratings yet
- GIAO TRINH AUTOCAD 2004 (Mo Dia Chat)Document83 pagesGIAO TRINH AUTOCAD 2004 (Mo Dia Chat)Haianh ChauNo ratings yet
- ĐHCN.Giáo trình thực hành điều khiển công nghiệp - Võ Duy Linh, 31 TrangDocument31 pagesĐHCN.Giáo trình thực hành điều khiển công nghiệp - Võ Duy Linh, 31 TrangLe TruongNo ratings yet
- Huong Dan Xay Dung ComponentDocument41 pagesHuong Dan Xay Dung ComponentCậu ÚtNo ratings yet
- NguyenQuangVinh LP&MPROBOTDocument47 pagesNguyenQuangVinh LP&MPROBOTCDT Quang VinhNo ratings yet
- 02 - IC3 Spark - Phan 2 - Tap 1 - Cac Ung Dung Chu Chot Ver. 2.1 JustifiedDocument82 pages02 - IC3 Spark - Phan 2 - Tap 1 - Cac Ung Dung Chu Chot Ver. 2.1 JustifiedNgọc LêNo ratings yet
- Huong Dan Su Dung Phan Mem Thiet Ke Duong OngDocument26 pagesHuong Dan Su Dung Phan Mem Thiet Ke Duong OngNguyễn Xuân NamNo ratings yet
- Đại Học Quốc Gia Hà Nội Trường Đại Học Công Nghệ: Tóm Tắt Đồ Án Tốt NghiệpDocument11 pagesĐại Học Quốc Gia Hà Nội Trường Đại Học Công Nghệ: Tóm Tắt Đồ Án Tốt NghiệpĐức DươngNo ratings yet
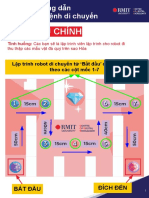
- Bài 1 - Khối Lệnh Di ChuyểnDocument13 pagesBài 1 - Khối Lệnh Di ChuyểnHuy AnhNo ratings yet
- Giao Trinh Autocad 2007 FullDocument111 pagesGiao Trinh Autocad 2007 FullNguyen Xuan Quynh TrangNo ratings yet
- Robot GapCoiDocument12 pagesRobot GapCoitri2892002No ratings yet
- Tuan 1-2 - Tim Hieu Phan Mem Và Chon SPDocument44 pagesTuan 1-2 - Tim Hieu Phan Mem Và Chon SPĐặng Thái DươngNo ratings yet
- Intouch 3Document33 pagesIntouch 3nguyentuanminh07No ratings yet
- MatlabDocument29 pagesMatlabLoc HoangNo ratings yet
- Huong Dan MapInfo Toan TapDocument301 pagesHuong Dan MapInfo Toan TapDuong NguyenNo ratings yet
- Báo Cáo Đồ Án Công Nghệ Phần MềmDocument455 pagesBáo Cáo Đồ Án Công Nghệ Phần MềmTrang TrangNo ratings yet
- Canh Tay RobotDocument29 pagesCanh Tay RobotNhân Hồ ThứcNo ratings yet
- Üng Dung Phän Mem: 0 G L G Dai Hoc Sao DoDocument10 pagesÜng Dung Phän Mem: 0 G L G Dai Hoc Sao DoQuyền Đoàn GiaNo ratings yet
- Tim Hieu Ve Canh Tay Robot Irb2400 AbbDocument38 pagesTim Hieu Ve Canh Tay Robot Irb2400 AbbNguyễn Ngọc TrungNo ratings yet
- Thiết Kế Máy Công Nghiệp PDFDocument160 pagesThiết Kế Máy Công Nghiệp PDFthangNo ratings yet
- tài liệu hướng dẫn lập trình C cho PIC bằng tiếng ViệtDocument40 pagestài liệu hướng dẫn lập trình C cho PIC bằng tiếng Việthathuc100% (29)
- Chapter 6 (Vietnamese)Document18 pagesChapter 6 (Vietnamese)Triều Nguyễn NgọcNo ratings yet
- Khóa luận TN -Document22 pagesKhóa luận TN -Triều Nguyễn NgọcNo ratings yet
- Suy Giam Tầng OzônDocument53 pagesSuy Giam Tầng OzônTriều Nguyễn NgọcNo ratings yet
- Giai Tich 2.docDocument3 pagesGiai Tich 2.docTriều Nguyễn NgọcNo ratings yet
- Transient Analyses - Integration MethodDocument2 pagesTransient Analyses - Integration MethodTriều Nguyễn NgọcNo ratings yet
- BTD-mba NewDocument39 pagesBTD-mba NewTriều Nguyễn NgọcNo ratings yet