You might also like
- 2020 National Building Code of Canada Seismic Hazard MapsDocument12 pages2020 National Building Code of Canada Seismic Hazard Mapselidstone@hotmail.comNo ratings yet
- Marine Electrics Made Simple or How to Keep the Batteries ChargedFrom EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNo ratings yet
- Project Report On Microbrewery & Imfl DistillationDocument10 pagesProject Report On Microbrewery & Imfl DistillationEIRI Board of Consultants and PublishersNo ratings yet
- Generator SynchronisationDocument12 pagesGenerator SynchronisationTapas Chaudhuri100% (1)
- Electric - Propulsion Imtech DieselElSys Rev05Document10 pagesElectric - Propulsion Imtech DieselElSys Rev05moiseian100% (1)
- Full Paper P-031Document9 pagesFull Paper P-031SUBRATA BISWASNo ratings yet
- Dynamic Braking Resistor CalculationDocument10 pagesDynamic Braking Resistor CalculationMuugii AmgaaNo ratings yet
- Case Study of Indirect Inguinal Hernia (R)Document71 pagesCase Study of Indirect Inguinal Hernia (R)Mary Grace Mas100% (1)
- Motor Reacceleration To Improve Process UptimeDocument8 pagesMotor Reacceleration To Improve Process UptimeramaiitrNo ratings yet
- OPTP-FOURGEN Information System Company ProfileDocument19 pagesOPTP-FOURGEN Information System Company ProfileAsim QadeerNo ratings yet
- AC Drives Reliance ElectricDocument12 pagesAC Drives Reliance ElectricnmvikramNo ratings yet
- Types of MotorsDocument12 pagesTypes of MotorsMatin Inamdar100% (1)
- Motor Reacceleration To Improve Process UptimeDocument8 pagesMotor Reacceleration To Improve Process UptimebobbyNo ratings yet
- An Improved Approach For Connecting VSD and Electric Motors PDFDocument8 pagesAn Improved Approach For Connecting VSD and Electric Motors PDFalbertofgvNo ratings yet
- CTAN 291 Dynamic BrakingDocument10 pagesCTAN 291 Dynamic BrakingpieroquirozNo ratings yet
- Converting Existing Synchronous Generators Into Synchronous CondensersDocument2 pagesConverting Existing Synchronous Generators Into Synchronous CondensersPradeep RajasekeranNo ratings yet
- The Advantages and Hazards of DC MotorsDocument6 pagesThe Advantages and Hazards of DC MotorsGalco IndustrialNo ratings yet
- White Paper VSD Nidec - Single Drive Running Multiple MotorsDocument13 pagesWhite Paper VSD Nidec - Single Drive Running Multiple MotorsRizky SondakhNo ratings yet
- AASHTO T 321 Determining The Fatigue Life of Asphalt Mixture Using Flexural Bending BeamDocument11 pagesAASHTO T 321 Determining The Fatigue Life of Asphalt Mixture Using Flexural Bending BeamĐức Trung TrầnNo ratings yet
- Negative Sequence RelayDocument7 pagesNegative Sequence RelayJamile_P_NNo ratings yet
- Drive Selection of Rolling MillsDocument4 pagesDrive Selection of Rolling MillsCihan OzturkNo ratings yet
- Belt Drive LH: Projectionsmeth.1 ISO5456-2Document1 pageBelt Drive LH: Projectionsmeth.1 ISO5456-2Traian SerbanNo ratings yet
- DBR CalculatorDocument69 pagesDBR CalculatorSURJIT SINGHNo ratings yet
- AN0144 Line Reactors and Isolation TransformersDocument4 pagesAN0144 Line Reactors and Isolation TransformerstvnexusNo ratings yet
- Differences Between Shunt and Series DC Motors On Drilling RigsDocument8 pagesDifferences Between Shunt and Series DC Motors On Drilling RigsSohail ANo ratings yet
- Why and How Braking Resistors Are Used: Broken Down Into Simpler PiecesDocument7 pagesWhy and How Braking Resistors Are Used: Broken Down Into Simpler PiecesGanesh KumarNo ratings yet
- 3-Power Factor Correction of Induction Motors - Electrical Installation GuideDocument4 pages3-Power Factor Correction of Induction Motors - Electrical Installation GuideFaisal WaseemNo ratings yet
- What Is Dynamic BrakingDocument10 pagesWhat Is Dynamic BrakinghiteshNo ratings yet
- Heising Et Al-2011-Optimised Energy-Efficient Drive System For Ship PropulsionDocument4 pagesHeising Et Al-2011-Optimised Energy-Efficient Drive System For Ship PropulsionEleftherios DeNo ratings yet
- Diesel Electric Systems For Offshore Vessels: Introduction and SummaryDocument9 pagesDiesel Electric Systems For Offshore Vessels: Introduction and Summaryjoaofelipe.msNo ratings yet
- Subject: Using Emergency Power With DSD Elevator DrivesDocument4 pagesSubject: Using Emergency Power With DSD Elevator DrivesmehariiNo ratings yet
- Modeling and Analysis of Shared/Common DC Bus Operation of AC Drives (Part I)Document6 pagesModeling and Analysis of Shared/Common DC Bus Operation of AC Drives (Part I)Pham LongNo ratings yet
- Unit 7electric TractionDocument35 pagesUnit 7electric TractionVinod KohliNo ratings yet
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- DCDrive CharacteristicsDocument3 pagesDCDrive CharacteristicsyondamineNo ratings yet
- (ABB) Braking A Drive SystemDocument2 pages(ABB) Braking A Drive Systemvnnvpsh1No ratings yet
- Why Not High Motor Power FactorDocument2 pagesWhy Not High Motor Power FactorRohan GuravNo ratings yet
- Surviving Voltage TransientsDocument3 pagesSurviving Voltage TransientsEeindustrialNo ratings yet
- Ansi MV Techtopics20 enDocument4 pagesAnsi MV Techtopics20 enmohamad5357No ratings yet
- Apnot 125Document4 pagesApnot 125wilson2142No ratings yet
- AC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDocument3 pagesAC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDedy AlfNo ratings yet
- Power Quality: M V S I o V F DDocument5 pagesPower Quality: M V S I o V F DHari Krishna.MNo ratings yet
- DYNAMIC BRAKING OF DC MOTOR 184 FinalDocument5 pagesDYNAMIC BRAKING OF DC MOTOR 184 FinalMuhammad QamarNo ratings yet
- A Very High Speed Switchedreluctance Startergenerator For AircraDocument7 pagesA Very High Speed Switchedreluctance Startergenerator For AircraAimmadNo ratings yet
- Lecture No 4Document37 pagesLecture No 4Walid salamaNo ratings yet
- Dinamic BrakeDocument18 pagesDinamic BrakeSam eagle goodNo ratings yet
- Electrical Generator: Smart Brains Institute of Engineering Design & ResearchDocument30 pagesElectrical Generator: Smart Brains Institute of Engineering Design & ResearchRajesh KannaNo ratings yet
- Replacing Motor-Generator Sets With Modern Static DC Drives: Trade PublicationDocument4 pagesReplacing Motor-Generator Sets With Modern Static DC Drives: Trade PublicationJibjab7No ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking MethodsRukkuArunNo ratings yet
- Hybrid SystemDocument8 pagesHybrid SystempriyadarshniNo ratings yet
- 5695 45 165 DC Motor Speed Control Using Magnetic AmplifierDocument8 pages5695 45 165 DC Motor Speed Control Using Magnetic AmplifierNexus GoddNo ratings yet
- AGN142 - B Pole Slipping and Reverse PowerDocument3 pagesAGN142 - B Pole Slipping and Reverse PowerLaiqNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Motor Short Circuit ControbutionDocument1 pageMotor Short Circuit ControbutionCayanan ArmanNo ratings yet
- Power Quality Improvement in Grid Connected Wind Energy SystemDocument11 pagesPower Quality Improvement in Grid Connected Wind Energy SystemRtkNo ratings yet
- Current Transformer, Potential Transformer, LTCT, Low Tension CT, Combined CTPT Unit, Metering Unit, Metering Cubicle, Resin Cast CT, Cast Resin CT, Cast Resin PT, RVT, Residual Voltatge TransformerDocument12 pagesCurrent Transformer, Potential Transformer, LTCT, Low Tension CT, Combined CTPT Unit, Metering Unit, Metering Cubicle, Resin Cast CT, Cast Resin CT, Cast Resin PT, RVT, Residual Voltatge TransformerSharafatNo ratings yet
- TR OductionDocument15 pagesTR OductionSid AslamNo ratings yet
- Amplifier ServoDocument3 pagesAmplifier ServoinputzNo ratings yet
- Graduation Project: Supervisor: Dr. Samer MayalehDocument48 pagesGraduation Project: Supervisor: Dr. Samer MayalehTien Pham vanNo ratings yet
- Reliability Considerations in Simple Paralleling ApplicationsDocument8 pagesReliability Considerations in Simple Paralleling Applications3efooNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Scott 480A Service Manual PDFDocument20 pagesScott 480A Service Manual PDFTraian SerbanNo ratings yet
- Scott 480A Owners Manual PDFDocument10 pagesScott 480A Owners Manual PDFTraian SerbanNo ratings yet
- Whitepaper EarthingDocument25 pagesWhitepaper EarthingTraian SerbanNo ratings yet
- Scott 460A Service Manual PDFDocument18 pagesScott 460A Service Manual PDFTraian SerbanNo ratings yet
- AN0355 Commander SK CTSoft BackupDocument11 pagesAN0355 Commander SK CTSoft BackupTraian SerbanNo ratings yet
- AN0321 Obtaining The Greater or Lesser of Two SignalsDocument5 pagesAN0321 Obtaining The Greater or Lesser of Two SignalsTraian SerbanNo ratings yet
- Imfinity 3-Phase Induction Motors: Ie2 High Efficiency & Ie3 Premium Efficiency and Ie4 Super Premium Efficiency MotorsDocument156 pagesImfinity 3-Phase Induction Motors: Ie2 High Efficiency & Ie3 Premium Efficiency and Ie4 Super Premium Efficiency MotorsTraian SerbanNo ratings yet
- Installation and Maintenance: Part Number: 4240 en - 2017.08 / CDocument28 pagesInstallation and Maintenance: Part Number: 4240 en - 2017.08 / CTraian SerbanNo ratings yet
- Nidec CPLS MotorsDocument68 pagesNidec CPLS MotorsTraian SerbanNo ratings yet
- Control Techniques F600Document24 pagesControl Techniques F600Traian SerbanNo ratings yet
- F600 Frame 3 To 11 Step by Step Guide Issue 3Document46 pagesF600 Frame 3 To 11 Step by Step Guide Issue 3Traian SerbanNo ratings yet
- Eplan Manual 03Document10 pagesEplan Manual 03Traian SerbanNo ratings yet
- Pump Drive F600 User Guide Issue 1Document463 pagesPump Drive F600 User Guide Issue 1Traian SerbanNo ratings yet
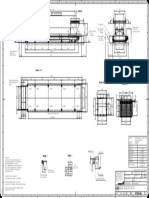
- Schema Electrica Masina Prelucrare Tamburi CabluDocument68 pagesSchema Electrica Masina Prelucrare Tamburi CabluTraian SerbanNo ratings yet
- Commander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCDocument2 pagesCommander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCTraian SerbanNo ratings yet
- Unidrive General Purpose Drives m200 m300 Brochure DownloadDocument20 pagesUnidrive General Purpose Drives m200 m300 Brochure DownloadTraian SerbanNo ratings yet
- Commander General Purpose AC Variable Speed Drives BrochureDocument28 pagesCommander General Purpose AC Variable Speed Drives BrochureTraian SerbanNo ratings yet
- Electric Project Documentation: . +A PROJECT 2507 1. Information PLUG-SPRAY2507Document5 pagesElectric Project Documentation: . +A PROJECT 2507 1. Information PLUG-SPRAY2507Traian SerbanNo ratings yet
- Setpoint & Actual Value Source SelectionsDocument35 pagesSetpoint & Actual Value Source SelectionsTraian SerbanNo ratings yet
- IND Converting WP Tension Control Center WindersDocument13 pagesIND Converting WP Tension Control Center WindersTraian SerbanNo ratings yet
- Exercises Items 24-31 S's VersionDocument4 pagesExercises Items 24-31 S's VersionComaythang5No ratings yet
- S. Sourirajan and Takeshi MatsuuraDocument498 pagesS. Sourirajan and Takeshi MatsuuraHema LakshmiNo ratings yet
- Purusavada PDFDocument23 pagesPurusavada PDFDanillo Costa LimaNo ratings yet
- Unit IV Cluster ComputingDocument70 pagesUnit IV Cluster ComputingPrathameshNo ratings yet
- Drawing and SketchingDocument1 pageDrawing and SketchingseanNo ratings yet
- Hitachi KH180-3 - Loading ChartDocument8 pagesHitachi KH180-3 - Loading ChartLong100% (1)
- July 2, 2016Document14 pagesJuly 2, 2016The Delphos HeraldNo ratings yet
- Soal PTS B Inggris 5Document8 pagesSoal PTS B Inggris 5Hasna NurlailiNo ratings yet
- PublicationDocument56 pagesPublicationAlvarin CsboyNo ratings yet
- Multimetro PromaxDocument1 pageMultimetro PromaxMiguelDelBarrioIglesisasNo ratings yet
- Aga 3Document9 pagesAga 3Nitipat PensitNo ratings yet
- Annalyn B. Forio, RN, ManDocument23 pagesAnnalyn B. Forio, RN, Manjay kusain100% (1)
- NASA-CR-33 Probability Functions For Random Responses - Prediction of Peaks, Fatigue Damage, and Catastrophic FailuresDocument60 pagesNASA-CR-33 Probability Functions For Random Responses - Prediction of Peaks, Fatigue Damage, and Catastrophic Failuresjason chowNo ratings yet
- Tourism Management: Liguo Wang, Yukio Yotsumoto TDocument13 pagesTourism Management: Liguo Wang, Yukio Yotsumoto TRezza Bagus Afif AmanaNo ratings yet
- TICO Pipe SupportsDocument8 pagesTICO Pipe SupportsEjeantengNo ratings yet
- NT Toupee Stock Wholesale Prices2023.6.9Document27 pagesNT Toupee Stock Wholesale Prices2023.6.9Mauricio Mendoza HerreraNo ratings yet
- EMEA ISCAN BR I-Scan Brochure 02.2013Document5 pagesEMEA ISCAN BR I-Scan Brochure 02.2013Juliano BelloNo ratings yet
- Physics 115: Exam Review: Sample Questions Thermodynamic ProcessesDocument15 pagesPhysics 115: Exam Review: Sample Questions Thermodynamic ProcessesJo okNo ratings yet
- Lagrange MultiplierDocument219 pagesLagrange Multiplierbarnali_dutta_1No ratings yet
- OPS12 - Operational ReportDocument5 pagesOPS12 - Operational ReportEmre AlgülNo ratings yet
- Corrosion Rate ConversionDocument2 pagesCorrosion Rate ConversionBakti PrasetyoNo ratings yet
- Determination of CMC in Food ProductsDocument4 pagesDetermination of CMC in Food ProductsMichelle M. SalvadorNo ratings yet
- BE Civil 1stDocument43 pagesBE Civil 1stOpal G CharyaNo ratings yet
- AngulDocument167 pagesAngulPartha Pratim BiswasNo ratings yet
- Medical Management For Cervical CancerDocument8 pagesMedical Management For Cervical CancerMark Anthony MalicseNo ratings yet