You might also like
- What Is Dynamic BrakingDocument10 pagesWhat Is Dynamic BrakinghiteshNo ratings yet
- DBR CalculatorDocument69 pagesDBR CalculatorSURJIT SINGHNo ratings yet
- Why and How Braking Resistors Are Used: Broken Down Into Simpler PiecesDocument7 pagesWhy and How Braking Resistors Are Used: Broken Down Into Simpler PiecesGanesh KumarNo ratings yet
- SP600 AC Drive Dynamic Braking Selection Guide: Instruction Manual D2-3489Document36 pagesSP600 AC Drive Dynamic Braking Selection Guide: Instruction Manual D2-3489roviijoNo ratings yet
- Types of MotorsDocument12 pagesTypes of MotorsMatin Inamdar100% (1)
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- DCDrive CharacteristicsDocument3 pagesDCDrive CharacteristicsyondamineNo ratings yet
- DC Motor Speed Control Using PWMDocument14 pagesDC Motor Speed Control Using PWMVincent KorieNo ratings yet
- Pro j2Document2 pagesPro j2nupur8891No ratings yet
- EX 3 DC Motor Design 1600073929235Document14 pagesEX 3 DC Motor Design 1600073929235kewalNo ratings yet
- How To Control Motor Speed With A PWM Circuit: (Article Continued From Previous Page)Document4 pagesHow To Control Motor Speed With A PWM Circuit: (Article Continued From Previous Page)Ajay S NairNo ratings yet
- DYNAMIC BRAKING OF DC MOTOR 184 FinalDocument5 pagesDYNAMIC BRAKING OF DC MOTOR 184 FinalMuhammad QamarNo ratings yet
- Motors: Ratings and SpecificationsDocument8 pagesMotors: Ratings and SpecificationsSoumen BanerjeeNo ratings yet
- Differences Between Shunt and Series DC Motors On Drilling RigsDocument8 pagesDifferences Between Shunt and Series DC Motors On Drilling RigsSohail ANo ratings yet
- Giri 1Document18 pagesGiri 1GiridharNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- DC Motor ControllerDocument7 pagesDC Motor ControllerJan MicahNo ratings yet
- AC Into DC MotorDocument9 pagesAC Into DC MotorIvan RisticNo ratings yet
- Understanding Variable Speed Drives (Part 1)Document4 pagesUnderstanding Variable Speed Drives (Part 1)geav25653855No ratings yet
- Report On Lecture 37Document3 pagesReport On Lecture 37Surajit SahaNo ratings yet
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- Slip Power RecoveryDocument4 pagesSlip Power Recoverysameer mohantyNo ratings yet
- Automatic BrakingDocument50 pagesAutomatic BrakingL Deepanti PunjabanNo ratings yet
- Synchronous MotorDocument5 pagesSynchronous Motornaga531No ratings yet
- ED1000Document4 pagesED1000Mohamed TahounNo ratings yet
- DC DrivesDocument10 pagesDC DrivesEuoshy HussainNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- Lecture No 4Document37 pagesLecture No 4Walid salamaNo ratings yet
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Document22 pagesGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNo ratings yet
- SCB Article UpdatedDocument13 pagesSCB Article Updatedjaygee1954No ratings yet
- 16 RegenerationDocument3 pages16 RegenerationHüseyin Murat PolaterNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Project On DC MotorDocument18 pagesProject On DC MotorSourav Deb RoyNo ratings yet
- A Study On Regenerative Braking System With Matlab SimulationDocument6 pagesA Study On Regenerative Braking System With Matlab SimulationDEBARATI DAMNo ratings yet
- Electronic Motors Part I - Brushless D.C. MotorsDocument12 pagesElectronic Motors Part I - Brushless D.C. MotorsRaldge ANo ratings yet
- DC Drives - ConstructionDocument10 pagesDC Drives - ConstructionSuyog ShingareNo ratings yet
- Unit4. Part 2Document20 pagesUnit4. Part 2mahato4120No ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Topic 6 and 7 - DC and AC DrivesDocument26 pagesTopic 6 and 7 - DC and AC DrivesAvinesh ChandNo ratings yet
- 4.1 DC Motor SpecificationDocument6 pages4.1 DC Motor SpecificationAsgher KhattakNo ratings yet
- Abstract 1Document14 pagesAbstract 1Shivam VermaNo ratings yet
- Dimensioning Basic InformationDocument28 pagesDimensioning Basic InformationVictor MendozaNo ratings yet
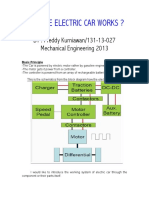
- How The Electric Car WorksDocument6 pagesHow The Electric Car WorksFreddy KurniawanNo ratings yet
- boost+DC MotorDocument7 pagesboost+DC Motorsaqib khalidNo ratings yet
- (ABB) Braking A Drive SystemDocument2 pages(ABB) Braking A Drive Systemvnnvpsh1No ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Regenerative Braking in Electric Vehicle 2Document51 pagesRegenerative Braking in Electric Vehicle 2Subham Datta100% (1)
- DC Drive ExplainationDocument17 pagesDC Drive ExplainationTabassum BanoNo ratings yet
- Marine Electrics Made Simple or How to Keep the Batteries ChargedFrom EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Siemens PLC Programming Example1 PDFDocument12 pagesSiemens PLC Programming Example1 PDFHani ErrachidNo ratings yet
- Programação em Realtime SystemDocument26 pagesProgramação em Realtime SystemSam eagle goodNo ratings yet
- Deckble KO-7KFMSDocument1 pageDeckble KO-7KFMSSam eagle goodNo ratings yet
- A03 StartupDocument48 pagesA03 StartupSam eagle goodNo ratings yet
- Deck BleDocument1 pageDeck BlenemoneoNo ratings yet
- Simatic Configuration Communication - 2Document18 pagesSimatic Configuration Communication - 2Sam eagle goodNo ratings yet
- Brochure Simatic-Wincc-Flexible enDocument28 pagesBrochure Simatic-Wincc-Flexible enSam eagle goodNo ratings yet
- Control Techniques Drives and Controls Handbook PDFDocument384 pagesControl Techniques Drives and Controls Handbook PDFbudak150% (2)
- S7-TCPIP Ethernet InterfaceDocument124 pagesS7-TCPIP Ethernet InterfaceSam eagle goodNo ratings yet
- SIMATIC NET Commissioning PC Stations - ManualDocument221 pagesSIMATIC NET Commissioning PC Stations - ManualSam eagle goodNo ratings yet
- Scan Flow ChartDocument2 pagesScan Flow ChartSam eagle goodNo ratings yet
- Brake DynamicDocument3 pagesBrake DynamicSam eagle goodNo ratings yet
- Sink SourceDocument4 pagesSink SourceSam eagle goodNo ratings yet
- TF5200 Gantry Operation enDocument33 pagesTF5200 Gantry Operation enSam eagle goodNo ratings yet
- Driver Gantry Rigid Control FunctionDocument22 pagesDriver Gantry Rigid Control FunctionSam eagle goodNo ratings yet
- CP5611 Card IntroductionDocument2 pagesCP5611 Card IntroductionSam eagle goodNo ratings yet
- FM 351 - Getting - StartedDocument20 pagesFM 351 - Getting - StartedSam eagle goodNo ratings yet
- The Test of CP5611 Communication CardDocument8 pagesThe Test of CP5611 Communication CardSam eagle goodNo ratings yet
- Simatic FM 351: First Steps in CommissioningDocument6 pagesSimatic FM 351: First Steps in CommissioningSam eagle goodNo ratings yet
- FM 351 Positioning Function Installation and ParameterDocument170 pagesFM 351 Positioning Function Installation and ParameterSam eagle goodNo ratings yet
- FM 351 Positioning With S7-300Document204 pagesFM 351 Positioning With S7-300Sam eagle goodNo ratings yet
- The Installation of CP5611 Communication CardDocument4 pagesThe Installation of CP5611 Communication CardSam eagle goodNo ratings yet
- SIMATIC NET Siemens PROFIBUS Controlle 3 Hardware DescriptionDocument68 pagesSIMATIC NET Siemens PROFIBUS Controlle 3 Hardware DescriptionSam eagle goodNo ratings yet
- CP5512E InstallationDocument12 pagesCP5512E InstallationSam eagle goodNo ratings yet
- SIMATIC NET Siemens PROFIBUS Controller 4 User DescriptionDocument96 pagesSIMATIC NET Siemens PROFIBUS Controller 4 User DescriptionSam eagle goodNo ratings yet
- SIMATIC NET Siemens PROFIBUS Controller 3 User DescriptionDocument106 pagesSIMATIC NET Siemens PROFIBUS Controller 3 User DescriptionSam eagle goodNo ratings yet
- PROFIBUS FMS-OLE-DDE S5 CP5431 and PC FMS-CP5412Document24 pagesPROFIBUS FMS-OLE-DDE S5 CP5431 and PC FMS-CP5412Sam eagle goodNo ratings yet
- PROFIBUS Servo Positioning Controller ARS 2000Document84 pagesPROFIBUS Servo Positioning Controller ARS 2000Sam eagle goodNo ratings yet
- C79000-G8976-C157-0 SIMATIC NET PROFIBUS Controller SPC 4-2Document126 pagesC79000-G8976-C157-0 SIMATIC NET PROFIBUS Controller SPC 4-2Sam eagle goodNo ratings yet
- Technical Specification of 11Kv & 33 KV D.O. Fuse Units With Erfg BarrelsDocument8 pagesTechnical Specification of 11Kv & 33 KV D.O. Fuse Units With Erfg BarrelsROHIT SHARMANo ratings yet
- EE2001 Circuit Analysis - OBTLDocument7 pagesEE2001 Circuit Analysis - OBTLAaron TanNo ratings yet
- Fan Uc Manuals 1791Document322 pagesFan Uc Manuals 1791Vlad Leucuta100% (3)
- Installation CommissioningDocument86 pagesInstallation Commissioningtavy1979No ratings yet
- Electrical Science: Lecture-5: Topic-Nodal and Mesh AnalysisDocument13 pagesElectrical Science: Lecture-5: Topic-Nodal and Mesh Analysisi_khandelwalNo ratings yet
- FPGA On SOM Example 469 EuroDocument30 pagesFPGA On SOM Example 469 Euroyahia elshakhsNo ratings yet
- Approval Sheet: Customer ManufacturerDocument7 pagesApproval Sheet: Customer ManufacturerypadillaNo ratings yet
- Excitation SystemDocument32 pagesExcitation SystemanishkoolNo ratings yet
- 78 - 1375264594 - 142606 - Lockout Relay CatalogueDocument52 pages78 - 1375264594 - 142606 - Lockout Relay CatalogueJarrett MathewsNo ratings yet
- AC Circuit 1 (Single-Phase)Document2 pagesAC Circuit 1 (Single-Phase)marlon desaculaNo ratings yet
- Lesson: Electromagnetic WavesDocument4 pagesLesson: Electromagnetic WavesHuey TingNo ratings yet
- SRT 1F Equipment DetailsDocument8 pagesSRT 1F Equipment Detailsjcardenas55No ratings yet
- Brgy Road Brgy Mangitayag Piddig Ilocos Norte IEPDocument8 pagesBrgy Road Brgy Mangitayag Piddig Ilocos Norte IEPLei GalzoteNo ratings yet
- Fault Code 599 Auxiliary Commanded Dual Output Shutdown - Special InstructionsDocument2 pagesFault Code 599 Auxiliary Commanded Dual Output Shutdown - Special InstructionsAhmedmah100% (1)
- IFE Training ManualDocument184 pagesIFE Training ManualJAYACHANDRANNo ratings yet
- Mechatronic ApplicationsDocument44 pagesMechatronic ApplicationsDevice SamsungNo ratings yet
- PLX 7200Document3 pagesPLX 7200ismailNo ratings yet
- Kinetix 300 SelectionguideDocument20 pagesKinetix 300 SelectionguideIndusistronic ArequipaNo ratings yet
- Ecodial 336Document92 pagesEcodial 336trinhnhattienNo ratings yet
- Handouts EIM. SS1 Week 2Document4 pagesHandouts EIM. SS1 Week 2myco sauraNo ratings yet
- HikVision DS-D5019QE-B 18.5" MonitorDocument3 pagesHikVision DS-D5019QE-B 18.5" Monitorchandak ghatakNo ratings yet
- L4 Translational Mechanical System PDFDocument33 pagesL4 Translational Mechanical System PDFshahabNo ratings yet
- GauravDocument26 pagesGauravgauravNo ratings yet
- Ee321 ObjectivesDocument3 pagesEe321 ObjectivesJomar DadorNo ratings yet
- Load CalculationDocument4 pagesLoad CalculationAbdul AlimNo ratings yet
- BXE SYLLABUS - TH and PRDocument5 pagesBXE SYLLABUS - TH and PRSakshi KhomaneNo ratings yet
- PRS10 MDocument80 pagesPRS10 MRogério PaiãoNo ratings yet
- Xaar Datasheet ProtonDocument2 pagesXaar Datasheet ProtonRicardo AmezcuaNo ratings yet
- Assignment 7Document3 pagesAssignment 7Akmal KhanNo ratings yet
- TMEIC ManualDocument2 pagesTMEIC Manualprasna007No ratings yet