You might also like
- Motor Control CenterDocument81 pagesMotor Control CenterMohamed Mohamed100% (2)
- MCC 1Document13 pagesMCC 1www.otomasyonegitimi.comNo ratings yet
- PLC WiringDocument7 pagesPLC WiringInstrumentation ToolsNo ratings yet
- Different Methods of Speed Control of Three-Phase PDFDocument7 pagesDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoNo ratings yet
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- Electic MotorsDocument22 pagesElectic MotorsAshutosh ShuklaNo ratings yet
- SME MCQ All UTDocument306 pagesSME MCQ All UTliveNo ratings yet
- CNC Programming PresentationDocument150 pagesCNC Programming PresentationVaibhav Vithoba Naik50% (4)
- FH6000 Electrical Diagrams PDFDocument367 pagesFH6000 Electrical Diagrams PDFAbdul Leon100% (1)
- PLC Motor ProgrammingDocument4 pagesPLC Motor ProgrammingInstrumentation ToolsNo ratings yet
- Authomatic Sock Knitting MachineDocument18 pagesAuthomatic Sock Knitting MachineGizaw AkaluNo ratings yet
- Automatic Star Delta Starter Using Relay and Adjustable Electronic Timer For 3 Phase Induction MotorDocument8 pagesAutomatic Star Delta Starter Using Relay and Adjustable Electronic Timer For 3 Phase Induction MotorNoushz channelNo ratings yet
- Hyster H36.00-48.000, 16CH - D117Document936 pagesHyster H36.00-48.000, 16CH - D117Bernard100% (3)
- Diagrama D6NDocument2 pagesDiagrama D6NPlstina Rams100% (1)
- Speed control of 3Ø AC Induction Motor using VSI & MicrocontrollerDocument32 pagesSpeed control of 3Ø AC Induction Motor using VSI & MicrocontrollerVijay PrabhuNo ratings yet
- Start-Delta and Softstarter differences for motor starting methodsDocument3 pagesStart-Delta and Softstarter differences for motor starting methodsDineesh SankaranarayananNo ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetNo ratings yet
- Induction MotorDocument6 pagesInduction MotorHamdani RizkiNo ratings yet
- Scalar Control of Induction Motor ThesisDocument8 pagesScalar Control of Induction Motor Thesislisanetkowiczerie100% (2)
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Infant Monitoring System Using Co2 Sensor-Project ReportDocument59 pagesInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- Synchronous Machine Testing With ALL-TEST InstrumentDocument7 pagesSynchronous Machine Testing With ALL-TEST InstrumentENRIQUENo ratings yet
- Em-30-02-01-3hp-Mr-01 (KM Chan 23.02.2021)Document23 pagesEm-30-02-01-3hp-Mr-01 (KM Chan 23.02.2021)ChanKamMinNo ratings yet
- Module 3: Induction Motor Drives: SyllabusDocument8 pagesModule 3: Induction Motor Drives: SyllabusManoj SkNo ratings yet
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriNo ratings yet
- Delta Connected Systems and Power Factor in AC MotorsDocument32 pagesDelta Connected Systems and Power Factor in AC MotorsSyed MamnoonNo ratings yet
- Induction Motor: AC Motor GuideDocument7 pagesInduction Motor: AC Motor GuideAbhishek ChibNo ratings yet
- Drit Improving EnergyDocument3 pagesDrit Improving EnergyOnwunta E K OnwuntaNo ratings yet
- Speed Control of 3 Phase Ac Induction Motor Using Micro 2407Document58 pagesSpeed Control of 3 Phase Ac Induction Motor Using Micro 2407sundarspace100% (2)
- Electrical Drives (ARG)Document24 pagesElectrical Drives (ARG)alu bhindiNo ratings yet
- Chapter-1: 1.1 Pi ControllerDocument21 pagesChapter-1: 1.1 Pi ControllerRAVINA MANGALNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- Introduction to Switched Reluctance Motor DesignDocument12 pagesIntroduction to Switched Reluctance Motor Designsameerpatel15770No ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)No ratings yet
- CSPDocument8 pagesCSPmeghraj01100% (1)
- PI Controller Based Torque and Speed Control of Five Phase Switched Reluctance MotorDocument6 pagesPI Controller Based Torque and Speed Control of Five Phase Switched Reluctance MotorPasupuleti SivakumarNo ratings yet
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoNo ratings yet
- Proposal of LocusDocument4 pagesProposal of LocusRam NepaliNo ratings yet
- Sofcon India Pvt. LTD., Lucknow: Vocational Training IN Panel Designing ,& Variable Speed DrivesDocument22 pagesSofcon India Pvt. LTD., Lucknow: Vocational Training IN Panel Designing ,& Variable Speed Drivesshailendra89No ratings yet
- Em 30 02 01Document25 pagesEm 30 02 01ChanKamMinNo ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- Electrical interview questions on motor principles and power electronicsDocument26 pagesElectrical interview questions on motor principles and power electronicsNavdeepNo ratings yet
- Ee-120 Ac MachineDocument6 pagesEe-120 Ac Machinesmk30150No ratings yet
- Understanding of InductionDocument6 pagesUnderstanding of InductionmeccayrNo ratings yet
- AGN 090 - Motor Starting FundamentalsDocument11 pagesAGN 090 - Motor Starting FundamentalsariwibowoNo ratings yet
- EE Tech in Electrical SystemsDocument38 pagesEE Tech in Electrical SystemsPriyesh MohtureNo ratings yet
- Why Use Very High Voltages in Power TransmissionDocument42 pagesWhy Use Very High Voltages in Power TransmissionKhan YousafzaiNo ratings yet
- MCC 1Document14 pagesMCC 1Arif SugestyanNo ratings yet
- Speed Control of Single Phase InductionDocument6 pagesSpeed Control of Single Phase InductionMuhammad MuneebNo ratings yet
- Mott Chapter 21Document29 pagesMott Chapter 21kundayi shavaNo ratings yet
- Motor Start TheoryDocument30 pagesMotor Start TheoryMaskbassNo ratings yet
- SRD-vehicle Traction Applications PDFDocument20 pagesSRD-vehicle Traction Applications PDFEduardo BittencourtNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Speed Control of Single and Three Phase Induction Motor Using Full Bridge CycloconverterDocument10 pagesSpeed Control of Single and Three Phase Induction Motor Using Full Bridge Cycloconverter2019-EE-35 Hafiz NoumanNo ratings yet
- PHD Thesis On Vector Control of Induction MotorDocument7 pagesPHD Thesis On Vector Control of Induction Motorsarahmichalakwarren100% (1)
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- Lab Rep DraftDocument5 pagesLab Rep DraftKent Orriele FadriquelNo ratings yet
- Ijetae 1013 117Document9 pagesIjetae 1013 117rasim_m1146No ratings yet
- Figure 1. Simple VFD / Fan ApplicationDocument7 pagesFigure 1. Simple VFD / Fan ApplicationTapas PalNo ratings yet
- Wide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlDocument7 pagesWide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlTrần Tấn LộcNo ratings yet
- A Novel CSI-Fed Induction Motor Drive: Abdul Rahiman Beig, Member, IEEE, and V. T. Ranganathan, Senior Member, IEEEDocument10 pagesA Novel CSI-Fed Induction Motor Drive: Abdul Rahiman Beig, Member, IEEE, and V. T. Ranganathan, Senior Member, IEEEishtiyqueNo ratings yet
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Analysis of Automobile Starter Solenoid Switch For Improved LifeDocument10 pagesAnalysis of Automobile Starter Solenoid Switch For Improved Lifesyed saqibNo ratings yet
- An5252 Lowvoltage Power Mosfet Switching Behavior and Performance Evaluation in Motor Control Application Topologies StmicroelectronicsDocument49 pagesAn5252 Lowvoltage Power Mosfet Switching Behavior and Performance Evaluation in Motor Control Application Topologies StmicroelectronicsGovindRajNo ratings yet
- Thesis Direct Torque ControlDocument7 pagesThesis Direct Torque Controljuliemoralesomaha100% (2)
- PLC Data Comparison InstructionsDocument4 pagesPLC Data Comparison InstructionsInstrumentation ToolsNo ratings yet
- PLC AnalogDocument3 pagesPLC AnalogInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example ProgramDocument4 pagesPLC Ladder Logic Example ProgramInstrumentation ToolsNo ratings yet
- PLC Logic Questions and AnswersDocument3 pagesPLC Logic Questions and AnswersInstrumentation ToolsNo ratings yet
- PLC ConfigurationDocument3 pagesPLC ConfigurationInstrumentation ToolsNo ratings yet
- PLC Counter InstructionsDocument7 pagesPLC Counter InstructionsInstrumentation ToolsNo ratings yet
- PLC Math InstructionsDocument4 pagesPLC Math InstructionsInstrumentation ToolsNo ratings yet
- PLC Questions and AnswersDocument13 pagesPLC Questions and AnswersInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
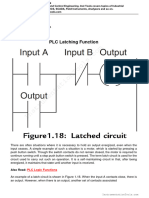
- PLC Latching FunctionDocument4 pagesPLC Latching FunctionInstrumentation ToolsNo ratings yet
- Liapunovs Stability CriterionDocument4 pagesLiapunovs Stability CriterionInstrumentation ToolsNo ratings yet
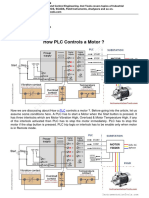
- PLC Motor LogicDocument5 pagesPLC Motor LogicInstrumentation ToolsNo ratings yet
- PLC Programming For PneumaticsDocument9 pagesPLC Programming For PneumaticsInstrumentation ToolsNo ratings yet
- Programmable Logic Controller ExampleDocument3 pagesProgrammable Logic Controller ExampleInstrumentation ToolsNo ratings yet
- PLC LogicDocument8 pagesPLC LogicInstrumentation ToolsNo ratings yet
- ThermowellsDocument3 pagesThermowellsInstrumentation ToolsNo ratings yet
- Valve StandardsDocument3 pagesValve StandardsInstrumentation ToolsNo ratings yet
- PLC Analog Input SamplingDocument2 pagesPLC Analog Input SamplingInstrumentation ToolsNo ratings yet
- Linear Ma To Square Root MaDocument1 pageLinear Ma To Square Root MaInstrumentation ToolsNo ratings yet
- Liapunovs StabilityDocument2 pagesLiapunovs StabilityInstrumentation ToolsNo ratings yet
- Level Sensor AnimationDocument2 pagesLevel Sensor AnimationInstrumentation ToolsNo ratings yet
- Simple PLC ProgramDocument5 pagesSimple PLC ProgramInstrumentation ToolsNo ratings yet
- Linear Approximation Non Linear SystemDocument5 pagesLinear Approximation Non Linear SystemInstrumentation ToolsNo ratings yet
- Override Control SystemDocument4 pagesOverride Control SystemInstrumentation ToolsNo ratings yet
- Resistors DisadvantagesDocument3 pagesResistors DisadvantagesInstrumentation ToolsNo ratings yet
- Level Instrumentation Design BasicsDocument12 pagesLevel Instrumentation Design BasicsInstrumentation ToolsNo ratings yet
- Level Sensors TerminologyDocument6 pagesLevel Sensors TerminologyInstrumentation ToolsNo ratings yet
- Linear To Square Root ExtractionDocument2 pagesLinear To Square Root ExtractionInstrumentation ToolsNo ratings yet
- PDFDocument2 pagesPDFRicardo Wan AgueroNo ratings yet
- 101402-9770 Parts ListDocument3 pages101402-9770 Parts ListMihai-Eugen Popa100% (1)
- CatalogDocument57 pagesCatalogIvan MontaoNo ratings yet
- Robot Actuators and Feedback Components (Main7)Document82 pagesRobot Actuators and Feedback Components (Main7)tarasasanka33% (6)
- Date Tehnice Pu SDGDocument2 pagesDate Tehnice Pu SDGArhiriiCatalinNo ratings yet
- Check Valve (Return Makeup)Document4 pagesCheck Valve (Return Makeup)Ahmad RidhaNo ratings yet
- Hydraulic Drive System - WikipediaDocument20 pagesHydraulic Drive System - WikipediaLAliNo ratings yet
- Digital diesel electronics control unit pin assignmentsDocument2 pagesDigital diesel electronics control unit pin assignmentskoks_s3No ratings yet
- Air Brake SystemsDocument48 pagesAir Brake SystemsBaD BoYNo ratings yet
- Chapter Exercises: Machine Component DrawingsDocument9 pagesChapter Exercises: Machine Component DrawingsJosé Vidal Benavides Linares100% (1)
- Service Masina IndesitDocument44 pagesService Masina IndesitgabiNo ratings yet
- Factsheet - Rear Axle Rt2310Hv: Features and BenefitsDocument2 pagesFactsheet - Rear Axle Rt2310Hv: Features and BenefitsJoãoPauloSouzaNo ratings yet
- GT4M-2000 Mec. Manual V1.0.0-1Document276 pagesGT4M-2000 Mec. Manual V1.0.0-1Cung Manh TuanNo ratings yet
- FE-2400 Fan-Performance-Characteristics-of-Centrifugal-Fans PDFDocument4 pagesFE-2400 Fan-Performance-Characteristics-of-Centrifugal-Fans PDFAvery OppegardNo ratings yet
- NMF 50 Cement PumpDocument43 pagesNMF 50 Cement PumppgiautNo ratings yet
- Basic Maintenance Programme for Belt ConveyorDocument6 pagesBasic Maintenance Programme for Belt Conveyorshani5573No ratings yet
- AGN 090 - Motor Starting FundamentalsDocument11 pagesAGN 090 - Motor Starting FundamentalsariwibowoNo ratings yet
- BG 4000Document3 pagesBG 4000ram pierNo ratings yet
- Monorail Hoist SystemDocument17 pagesMonorail Hoist SystemypatelsNo ratings yet
- Problems on Testing and Performance of I.C. EnginesDocument5 pagesProblems on Testing and Performance of I.C. Enginesasjdkfjskaldjf;klasdfNo ratings yet
- Renault Kerax 400 8X4: Technical SpecificationDocument4 pagesRenault Kerax 400 8X4: Technical Specificationbayu enasoraNo ratings yet
- Mba S 402Document1 pageMba S 402RetselisitsoeNo ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet