You might also like
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Vibration Frequencies For A Non-Uniform Beam With End MassDocument9 pagesVibration Frequencies For A Non-Uniform Beam With End MassThanyawut WansuwanNo ratings yet
- 1 s2.0 001600326190148X MainDocument8 pages1 s2.0 001600326190148X MainIrani GonçalvesNo ratings yet
- Naga Ya 1977Document7 pagesNaga Ya 1977sushant kumarNo ratings yet
- 1 s2.0 S0898122105001252 MainDocument12 pages1 s2.0 S0898122105001252 MainadilNo ratings yet
- Cylindrically Orthotropic Plates with Large DeflectionsDocument11 pagesCylindrically Orthotropic Plates with Large DeflectionsyasameenNo ratings yet
- XCIV The Large Deflection of Simply Supported BeamsDocument8 pagesXCIV The Large Deflection of Simply Supported BeamsFacheng ZhaoNo ratings yet
- Snoek Effect PDFDocument5 pagesSnoek Effect PDFhamed soleymaniNo ratings yet
- AngmomDocument29 pagesAngmomYılmaz ÇolakNo ratings yet
- R - Linear Systems On Toric Varieties - LaterveerDocument8 pagesR - Linear Systems On Toric Varieties - LaterveerUnDueTreSberlaNo ratings yet
- Input-Output Relations in OpticalDocument46 pagesInput-Output Relations in OpticalLucas RibeiroNo ratings yet
- Two-Body Problem With DragDocument13 pagesTwo-Body Problem With DragMaria RitaNo ratings yet
- Dirac Delta Function TransformationsDocument5 pagesDirac Delta Function Transformationslee lwxNo ratings yet
- Levinson Elasticity Plates Paper_isotropicDocument9 pagesLevinson Elasticity Plates Paper_isotropicDeepaRavalNo ratings yet
- Geo SeliDocument14 pagesGeo Selihagos dargoNo ratings yet
- Dynamics of Continuos Multispan Beams Under A Moving ForceDocument8 pagesDynamics of Continuos Multispan Beams Under A Moving ForceGerardo Nuñez MirandaNo ratings yet
- 25c8 PDFDocument10 pages25c8 PDFIrfan QureshiNo ratings yet
- Demengel1989 Article CompactnessTheoremsForSpacesOf PDFDocument39 pagesDemengel1989 Article CompactnessTheoremsForSpacesOf PDFMathSpaceNo ratings yet
- PH563-Assignment Sheet 5 - 17 Oct 2019 Marked Problems To Be Submitted On 31st OctDocument2 pagesPH563-Assignment Sheet 5 - 17 Oct 2019 Marked Problems To Be Submitted On 31st Octbhuppi KumarNo ratings yet
- Implementation of Domain Integral Approach For J Integral EvaluationsDocument8 pagesImplementation of Domain Integral Approach For J Integral Evaluationsamd mhmNo ratings yet
- App Atio 'S Aw o e Ement S: A (X) A (X) LaxDocument2 pagesApp Atio 'S Aw o e Ement S: A (X) A (X) Lax20CEB415 Mohd Aamir KhanNo ratings yet
- Method of Ritz-Galerkin for solving equations of motion of coupled bending-bending torsion vibrations of turbine bladesDocument8 pagesMethod of Ritz-Galerkin for solving equations of motion of coupled bending-bending torsion vibrations of turbine bladesFAIZNo ratings yet
- Selvadurai 1984Document11 pagesSelvadurai 1984Eduardo Alemany PerretNo ratings yet
- QM2 HM2Document2 pagesQM2 HM2jog1No ratings yet
- Elastic Buckling of Orthotropic Plates Under Varying Axial StressesDocument8 pagesElastic Buckling of Orthotropic Plates Under Varying Axial StressesManish ShashikantNo ratings yet
- Natural Frequencies of Beams Under Tensile Axial LoadsDocument18 pagesNatural Frequencies of Beams Under Tensile Axial Loadsgotveren100% (1)
- Wave Propagation in Plates of Anisotropic Media On The Basis Exact TheoryDocument8 pagesWave Propagation in Plates of Anisotropic Media On The Basis Exact TheoryMun ZiiNo ratings yet
- The Elastic CatenaryDocument9 pagesThe Elastic CatenaryAnkur MehtaNo ratings yet
- New Type of Electromagnetic Wave Propagating at An InterfaceDocument3 pagesNew Type of Electromagnetic Wave Propagating at An InterfaceskurilkinaNo ratings yet
- On The Concurrence of Lines and Planes in HyperspaceDocument6 pagesOn The Concurrence of Lines and Planes in HyperspaceAnonymous muSzg4fHx9No ratings yet
- Bracci2011 - On The Weyl Algebra For A Particle On A SphereDocument6 pagesBracci2011 - On The Weyl Algebra For A Particle On A SphereBozidar KemicNo ratings yet
- Dangla1988 APlaneStrainSoilStructureInteractionModelDocument14 pagesDangla1988 APlaneStrainSoilStructureInteractionModelpatrick danglaNo ratings yet
- Resistance Dimension, Random Walk Dimension and Fractal DimensionDocument18 pagesResistance Dimension, Random Walk Dimension and Fractal Dimensionbatenas1No ratings yet
- Effective Numerical Treatment of Boundary Integral Equations. J.C Lachat and WatsonDocument15 pagesEffective Numerical Treatment of Boundary Integral Equations. J.C Lachat and Watsonrahim.sihadjmohandNo ratings yet
- Haken 1975Document2 pagesHaken 1975cesar abraham torrico chavezNo ratings yet
- Coupled Instabilities in A Two-Bar Frame A QualitaDocument10 pagesCoupled Instabilities in A Two-Bar Frame A QualitabenyfirstNo ratings yet
- LP Estimates For The Cauchy Problem With Applications To The Navier-Stokes Equations in Exterior DomainsDocument23 pagesLP Estimates For The Cauchy Problem With Applications To The Navier-Stokes Equations in Exterior DomainsHassan ZmourNo ratings yet
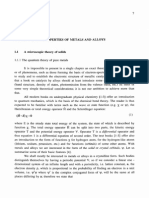
- Chapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisDocument66 pagesChapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisHenrique SouzaNo ratings yet
- Phys511 PS06Document5 pagesPhys511 PS06Mac LNo ratings yet
- MAT 124-13 Some ExercisesDocument1 pageMAT 124-13 Some ExercisesasdasNo ratings yet
- Wang,Kaixin (1)Document13 pagesWang,Kaixin (1)sergenNo ratings yet
- SPECTRAL ANALYSIS OF WAVES IN BEAMSDocument20 pagesSPECTRAL ANALYSIS OF WAVES IN BEAMSmifeNo ratings yet
- On The Low Frequency Elastic Response of A Spherical ParticleDocument8 pagesOn The Low Frequency Elastic Response of A Spherical ParticlesteveNo ratings yet
- 古典電動力學題庫Document14 pages古典電動力學題庫joshua7312No ratings yet
- Free Vibrations of Stepped Nano-BeamsDocument10 pagesFree Vibrations of Stepped Nano-BeamsNguyễn Sơn LâmNo ratings yet
- Band Theory Elements OverviewDocument15 pagesBand Theory Elements OverviewharshitNo ratings yet
- Structure of The NTH Roots of A MatrixDocument8 pagesStructure of The NTH Roots of A MatrixjjeannitonNo ratings yet
- mit8_323_s23_pset02Document6 pagesmit8_323_s23_pset02Ayham ziadNo ratings yet
- WongDocument6 pagesWongAlvaro Rafael MartínezNo ratings yet
- Lamb'S Problem For An Anisotropic Half-SpaceDocument18 pagesLamb'S Problem For An Anisotropic Half-SpaceToto ToualiNo ratings yet
- Charge Moment Tensor and Magnetic Moment of Rotational Charged BodiesDocument10 pagesCharge Moment Tensor and Magnetic Moment of Rotational Charged BodiesSandip MaityNo ratings yet
- Diffraction Lecture Notes - IntroductionDocument17 pagesDiffraction Lecture Notes - IntroductionSuvra Sekhar DasNo ratings yet
- Engineering Fracture Mechanics Formulas for Dynamic Crack Stress Intensity FactorsDocument4 pagesEngineering Fracture Mechanics Formulas for Dynamic Crack Stress Intensity FactorsvhgaitanNo ratings yet
- Theoretische Physik 2: ElektrodynamikDocument8 pagesTheoretische Physik 2: ElektrodynamikJuan P HDNo ratings yet
- Weakly Differentiable Functions Volume 120 - Pointwise Behavior of Sobolev FunctionsDocument65 pagesWeakly Differentiable Functions Volume 120 - Pointwise Behavior of Sobolev FunctionsHam Karim RUPPNo ratings yet
- Cariena 2012Document15 pagesCariena 2012Carlos LopezNo ratings yet
- Modal Analysis of A Aeroplane WingDocument20 pagesModal Analysis of A Aeroplane WingPrasanth Inavolu IPNo ratings yet
- Problems m1 PDFDocument7 pagesProblems m1 PDFparesh kumar sahooNo ratings yet
- Chaker 2020Document32 pagesChaker 2020mandanatrisaviNo ratings yet
- The Influence of Systemic Hypoxia and Reoxygenation On The GlutaDocument5 pagesThe Influence of Systemic Hypoxia and Reoxygenation On The GlutaAndana TrisaviNo ratings yet
- Pozo 2017Document32 pagesPozo 2017mandanatrisaviNo ratings yet
- 10 1093@cvr@cvz042Document30 pages10 1093@cvr@cvz042mandanatrisaviNo ratings yet
- Pozo 2017Document32 pagesPozo 2017mandanatrisaviNo ratings yet
- Industrial Lubrication and Tribology: Article InformationDocument8 pagesIndustrial Lubrication and Tribology: Article InformationmandanatrisaviNo ratings yet
- Katsikea 2019Document29 pagesKatsikea 2019mandanatrisaviNo ratings yet
- Agitation MixingDocument58 pagesAgitation MixingHernanda Aldian SyahNo ratings yet
- (B.U Pai) Turbomachines (B-Ok - Xyz)Document408 pages(B.U Pai) Turbomachines (B-Ok - Xyz)Prithwiraj Paul100% (1)
- Intro1 M12 Thermal PDFDocument22 pagesIntro1 M12 Thermal PDFvovanpedenkoNo ratings yet
- B49CE Exam Answers v1Document40 pagesB49CE Exam Answers v1Konul AlizadehNo ratings yet
- Pad Footing ExampleDocument6 pagesPad Footing ExampleMaddy_madhu100% (1)
- CIE354 Syllabus 2017Document4 pagesCIE354 Syllabus 2017Sebastian CanoNo ratings yet
- Exothermic ReactionsDocument25 pagesExothermic ReactionsazilaNo ratings yet
- Thermodynamic Gas PowerDocument12 pagesThermodynamic Gas PowerWegdan AldobaiNo ratings yet
- Plastic - Design - in Structuralll11111111111111111111 Stelel2222222222 PDFDocument258 pagesPlastic - Design - in Structuralll11111111111111111111 Stelel2222222222 PDFShams KhattakNo ratings yet
- HYSYS WorkshopDocument232 pagesHYSYS Workshopソーダ エドゥアルド100% (2)
- Sectional directional control valves overviewDocument101 pagesSectional directional control valves overviewIstenio Cassiano NetoNo ratings yet
- Fluid Mechanics 1Document10 pagesFluid Mechanics 1cheongjiajunNo ratings yet
- Numerical Simulation of Ultrasonic Pile Integrity Testing: Acoustic MethodsDocument11 pagesNumerical Simulation of Ultrasonic Pile Integrity Testing: Acoustic MethodsPicasso Debnath100% (1)
- Tdp-201 Psychrometrics Level 1 FundamentalsDocument71 pagesTdp-201 Psychrometrics Level 1 FundamentalsSNMNo ratings yet
- Mechanical Intro 16.0 WS9.1 SSthermDocument15 pagesMechanical Intro 16.0 WS9.1 SSthermMatthewNo ratings yet
- 01 Introduction To Well Completions PDFDocument49 pages01 Introduction To Well Completions PDFام فاطمة البطاط100% (5)
- Morel - Comparison of Several Models For Multi Size Bubbly Flows On An Adiabatic Experiment - 2010Document15 pagesMorel - Comparison of Several Models For Multi Size Bubbly Flows On An Adiabatic Experiment - 2010Roman MukinNo ratings yet
- H Chanson, T Brattberg 2000 PDFDocument32 pagesH Chanson, T Brattberg 2000 PDFcasallasNo ratings yet
- He-3 Bulletin 713Document2 pagesHe-3 Bulletin 713saulomonNo ratings yet
- Surveying Corrections TapingDocument5 pagesSurveying Corrections TapingChristopherchan Chan100% (1)
- EM39Document48 pagesEM39jeremypollardNo ratings yet
- Compression Member LSMDocument1 pageCompression Member LSMSuman NakarmiNo ratings yet
- Verification 001Document6 pagesVerification 001Med El Hadi AbidiNo ratings yet
- Waterjet Thesis - Rolls Royce PDFDocument170 pagesWaterjet Thesis - Rolls Royce PDFAmmy singhNo ratings yet
- Laboratory Activity 8 Specific-HeatDocument9 pagesLaboratory Activity 8 Specific-HeatJohn Hayden Dela CruzNo ratings yet
- AERO 4402 FinalDocument16 pagesAERO 4402 FinalminyounNo ratings yet
- Bopp & Reuther CatalogueDocument60 pagesBopp & Reuther CatalogueIrfan BagwanNo ratings yet
- Training EN 1993Document81 pagesTraining EN 1993Nguyễn TrườngNo ratings yet
- Pumps, Valves, & Fans: Moving FluidsDocument33 pagesPumps, Valves, & Fans: Moving Fluidskamal_muralikumarNo ratings yet
- Expansion Vessel in A Solar Installation: White PaperDocument9 pagesExpansion Vessel in A Solar Installation: White PaperKhizerNo ratings yet