You might also like
- MKS SERVO57D - CAN User Manual V1.0.0Document45 pagesMKS SERVO57D - CAN User Manual V1.0.0EU100% (1)
- Business Plan For Online Babysitter CompanyDocument64 pagesBusiness Plan For Online Babysitter Companythrstorm94% (17)
- Electrical Abbreviations and Full FormsDocument5 pagesElectrical Abbreviations and Full Formsraja.shriram89% (126)
- FX3u 56MR ManualDocument17 pagesFX3u 56MR Manualjeni1086100% (2)
- Newnes Electronics Engineers Pocket BookFrom EverandNewnes Electronics Engineers Pocket BookRating: 4.5 out of 5 stars4.5/5 (4)
- The Little White Ebook of Homeshoring JobsDocument243 pagesThe Little White Ebook of Homeshoring JobsMelissa Brewer100% (2)
- LE3u 56MR ManualDocument17 pagesLE3u 56MR ManualJoão ArtilheiroNo ratings yet
- Basic InstructionDocument11 pagesBasic InstructionMuhammad Saad (Official Account)No ratings yet
- FX1N PLC FANCO-LOLETTE Manual-REVISEDDocument8 pagesFX1N PLC FANCO-LOLETTE Manual-REVISEDbarisiczNo ratings yet
- FX1N PLC ManualDocument13 pagesFX1N PLC ManualbarisiczNo ratings yet
- LE3U-Manual SpecificationDocument11 pagesLE3U-Manual SpecificationPVC XANH QDNo ratings yet
- Instruction Manual PDFDocument10 pagesInstruction Manual PDFАнгел МиладиновNo ratings yet
- Embedded: C and The PIC MicrocontrollerDocument21 pagesEmbedded: C and The PIC MicrocontrollerSamuel TaylorNo ratings yet
- CHI MEI Pt650d Instruction ManualDocument63 pagesCHI MEI Pt650d Instruction ManualBalanças EstaticaNo ratings yet
- SG As Servo Driver User ManualDocument60 pagesSG As Servo Driver User ManualGokul RNo ratings yet
- PLC Programming Ladder LogicDocument18 pagesPLC Programming Ladder LogicPackiyaraj BMSNo ratings yet
- fx2n V13-EnDocument10 pagesfx2n V13-Enbokic88No ratings yet
- Week 04Document68 pagesWeek 04aroosa naheedNo ratings yet
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDocument24 pagesNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNo ratings yet
- Features Description: LTC2368-16 16-Bit, 1Msps, Pseudo-Differential Unipolar SAR ADC With 94.7dB SNRDocument24 pagesFeatures Description: LTC2368-16 16-Bit, 1Msps, Pseudo-Differential Unipolar SAR ADC With 94.7dB SNRrotenolabsNo ratings yet
- General Description: PT650F Instruction Manual 1Document10 pagesGeneral Description: PT650F Instruction Manual 1AbubackerNo ratings yet
- PT650f e 2002Document67 pagesPT650f e 2002lehahai100% (4)
- FDocument24 pagesFrotenolabsNo ratings yet
- PLC Board Letronicom FX3U-14MT-6AD-2DADocument6 pagesPLC Board Letronicom FX3U-14MT-6AD-2DAAlex FrancisconNo ratings yet
- Tda 10021 DatasheetDocument17 pagesTda 10021 DatasheetWilly DacoNo ratings yet
- IN44780U Dot Matrix Liquid Crystal Display Controller & DriverDocument10 pagesIN44780U Dot Matrix Liquid Crystal Display Controller & DriverSilviu AdgjNo ratings yet
- IC CXD3068Q DatasheetDocument134 pagesIC CXD3068Q Datasheetnaupas007No ratings yet
- ADC08060 8-Bit, 20 MSPS To 60 MSPS, 1.3 MW/MSPS A/D ConverterDocument19 pagesADC08060 8-Bit, 20 MSPS To 60 MSPS, 1.3 MW/MSPS A/D ConverterJuan CarlosNo ratings yet
- SM5160CM/DM: Nippon Precision Circuits IncDocument7 pagesSM5160CM/DM: Nippon Precision Circuits IncLucas Gabriel CasagrandeNo ratings yet
- LCM1602A DatasheetDocument21 pagesLCM1602A DatasheetjohnluzardoNo ratings yet
- Performance Specification: Basic InstructionDocument3 pagesPerformance Specification: Basic InstructionMangnimit SomlakNo ratings yet
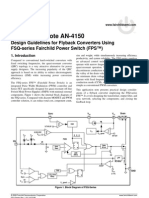
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- Copia Di JDY-08 Bluetooth LE Module DatasheetDocument29 pagesCopia Di JDY-08 Bluetooth LE Module DatasheetNico Weide ZangirolamiNo ratings yet
- Max 2981Document13 pagesMax 2981Jamila RobinsonNo ratings yet
- Cxd3059ar Sony CDDocument27 pagesCxd3059ar Sony CDJulian Andres RozoNo ratings yet
- 74LVC273Document15 pages74LVC273ly7123No ratings yet
- Matlab Based Autonomous Ball Searching Robot Using Image ProcessingDocument24 pagesMatlab Based Autonomous Ball Searching Robot Using Image Processingnikhil3298No ratings yet
- Metal Detector Robotic Vehicle: Submitted byDocument25 pagesMetal Detector Robotic Vehicle: Submitted byDarshan ParmarNo ratings yet
- GM16C550Document23 pagesGM16C550kranti06No ratings yet
- LPD6803Document13 pagesLPD6803Deyabu DesignNo ratings yet
- MC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Document24 pagesMC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Willington Augusto ArizaNo ratings yet
- LTE Important Parameters and Switches - DoDocument80 pagesLTE Important Parameters and Switches - Domausam_panchal2013No ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Document21 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Wellison RodriguesNo ratings yet
- Speed Checker To Detect Rash Driving oDocument22 pagesSpeed Checker To Detect Rash Driving oSrikaraniNo ratings yet
- MITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingDocument3 pagesMITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingHamid KharazmiNo ratings yet
- Interfacing of 8051: Unit 4Document44 pagesInterfacing of 8051: Unit 4radhika patelNo ratings yet
- Unit Ii: Baseband TransmissionDocument41 pagesUnit Ii: Baseband TransmissionAMUDHAN VETRIVEL G TNo ratings yet
- Vacon Lift: User'S ManualDocument53 pagesVacon Lift: User'S ManualMohammed Qaid AlathwaryNo ratings yet
- Numbering System of Electrical EquipmentDocument2 pagesNumbering System of Electrical EquipmentJaime CarcamoNo ratings yet
- HCF4033B: Decade Counter/Divider With Decoded 7-Segment Display Output and Ripple BlankingDocument11 pagesHCF4033B: Decade Counter/Divider With Decoded 7-Segment Display Output and Ripple BlankingtimNo ratings yet
- Adc DacDocument15 pagesAdc Dackranthi59No ratings yet
- Integrated Circuit Systems, IncDocument11 pagesIntegrated Circuit Systems, Incroger marqNo ratings yet
- 89c51 Raining Cou Week1Document33 pages89c51 Raining Cou Week1api-3761333No ratings yet
- File 1406270302Document25 pagesFile 1406270302rupeshNo ratings yet
- Kuman 3.5 Inch Touch Screen DatasheetDocument15 pagesKuman 3.5 Inch Touch Screen DatasheetMarcGarciaNo ratings yet
- Datasheet MOD DO 16R v2Document3 pagesDatasheet MOD DO 16R v2YatinNo ratings yet
- Introduction To The ARM ProcessorsDocument58 pagesIntroduction To The ARM ProcessorswooDefyNo ratings yet
- Converter & Timing CircuitDocument16 pagesConverter & Timing Circuityoboiiii649No ratings yet
- Newnes Radio and Electronics Engineer's Pocket Book: Revised by the Editorial Staff of Electronics Today InternationalFrom EverandNewnes Radio and Electronics Engineer's Pocket Book: Revised by the Editorial Staff of Electronics Today InternationalNo ratings yet
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- Latitude E 7490 Laptop Owners Manual en UsDocument92 pagesLatitude E 7490 Laptop Owners Manual en UsAmir KhanNo ratings yet
- Alzubi 2018 J. Phys. Conf. Ser. 1142 012012Document23 pagesAlzubi 2018 J. Phys. Conf. Ser. 1142 012012bari12841No ratings yet
- CpuzDocument30 pagesCpuzAxelNo ratings yet
- Monitor CO2 and TVOC With ESP32Document6 pagesMonitor CO2 and TVOC With ESP32abhinav sharmaNo ratings yet
- VW 01059 6 3 enDocument22 pagesVW 01059 6 3 enSebastianNo ratings yet
- Binary Bug Automatic Binary TradingDocument6 pagesBinary Bug Automatic Binary TradingAbdulazeez SuleimanNo ratings yet
- A Requirements-Based Approach For TheDocument4 pagesA Requirements-Based Approach For TheMesfin GudetaNo ratings yet
- MATH 206 (2020/2021) - Discrete Mathematics - Course ContentsDocument3 pagesMATH 206 (2020/2021) - Discrete Mathematics - Course ContentsNicole EchezonaNo ratings yet
- Guide Anssi Secure Admin Is Pa 022 en v2Document68 pagesGuide Anssi Secure Admin Is Pa 022 en v2Abhishek BahiratNo ratings yet
- PCA ManualDocument64 pagesPCA ManualDan MereanuNo ratings yet
- Computer Hardware Module - Coh 1101Document96 pagesComputer Hardware Module - Coh 1101Chikopa Misheck100% (2)
- An Inside Look at Industrial Ethernet Communication ProtocolsDocument7 pagesAn Inside Look at Industrial Ethernet Communication Protocols王根萌No ratings yet
- Mlacp Server SupportDocument26 pagesMlacp Server SupporttoicantienNo ratings yet
- Dan Appleman's Developing ActiveX Components With Visual Basic 5.0Document10 pagesDan Appleman's Developing ActiveX Components With Visual Basic 5.0Romancing LoveNo ratings yet
- Using Google Public DNSDocument7 pagesUsing Google Public DNSPeter Earl FormillezaNo ratings yet
- Preventive MaintenanceDocument2 pagesPreventive MaintenanceSweeti AngelNo ratings yet
- Maintenance LOG BOOKDocument1 pageMaintenance LOG BOOKAnonymous kYcX3YENNo ratings yet
- Ispconfig Ubuntu16 NginxDocument11 pagesIspconfig Ubuntu16 NginxEka ApsariNo ratings yet
- WinAura ProDocument76 pagesWinAura ProTijana FilipovicNo ratings yet
- 01 Unit 3 13 A Digital Portfolio Assignment 2 - Design Template l2 Harrison Odonnell It Level 2Document17 pages01 Unit 3 13 A Digital Portfolio Assignment 2 - Design Template l2 Harrison Odonnell It Level 2api-644238237No ratings yet
- Forex NewDocument20 pagesForex NewHariyanto ChowNo ratings yet
- Oracle - Practicetest.1z0 900.v2019!08!05.by - Danielle.71qDocument44 pagesOracle - Practicetest.1z0 900.v2019!08!05.by - Danielle.71qcveta21No ratings yet
- Data Management 3D Modelling Mine DesignDocument11 pagesData Management 3D Modelling Mine DesignDadan Saefudin RosidiNo ratings yet
- GenRocket Launches Synthetic Data CommunityDocument3 pagesGenRocket Launches Synthetic Data CommunityPR.comNo ratings yet
- Success Deploy PI Integrator For BA Installation DatasheetDocument2 pagesSuccess Deploy PI Integrator For BA Installation DatasheetBenjamín Price BallónNo ratings yet
- Final Project Online Book Store SrsDocument21 pagesFinal Project Online Book Store SrsRajveer SinghNo ratings yet
- Viva QuestionsDocument5 pagesViva QuestionsAkash YadavNo ratings yet
- Human Computer InteractionDocument64 pagesHuman Computer InteractionJanith GamageNo ratings yet