You might also like
- Fire Resistance UL 1709Document2 pagesFire Resistance UL 1709ednavilod100% (3)
- Discover Haxeflixel FullDocument182 pagesDiscover Haxeflixel FullKristian Macanga100% (3)
- SEBI Claim Form Details for Shukul Wealth AdvisoryDocument3 pagesSEBI Claim Form Details for Shukul Wealth Advisoryandrew punekarNo ratings yet
- Lane-Based Micro-Analytical Model of A Roundabout Corridor: ReprintDocument13 pagesLane-Based Micro-Analytical Model of A Roundabout Corridor: ReprintPedro PeñaNo ratings yet
- 28 - Sensitivity Analysis in Traffic Microscopic Simulation ModelDocument10 pages28 - Sensitivity Analysis in Traffic Microscopic Simulation ModelvincerixNo ratings yet
- Simulated Capacity of Roundabouts and Impact of Roundabout Within A Progressed Signalized RoadDocument24 pagesSimulated Capacity of Roundabouts and Impact of Roundabout Within A Progressed Signalized RoadpradeepNo ratings yet
- AKCELIK UrbanTransportConf2015 PresentationDocument33 pagesAKCELIK UrbanTransportConf2015 PresentationSujitNo ratings yet
- Video-Based Detection and Tracking Model For Traffic SurveillanceDocument17 pagesVideo-Based Detection and Tracking Model For Traffic SurveillanceHashem EL-MaRimeyNo ratings yet
- 19 - Simulation of Observed Traffic Conditions On Roundabouts by Dedicated SoftwareDocument13 pages19 - Simulation of Observed Traffic Conditions On Roundabouts by Dedicated SoftwarevincerixNo ratings yet
- SIDRA and UK Roundabout Models PDFDocument23 pagesSIDRA and UK Roundabout Models PDFAlexNo ratings yet
- A Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksDocument19 pagesA Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksMahabub SubhaniNo ratings yet
- A Study On Wear Evaluation of Railway Wheels BasedDocument31 pagesA Study On Wear Evaluation of Railway Wheels BasedBiruk Yifru100% (1)
- 2019 - ASA-routing A-Star Adaptive Routing Algorithm For Network-on-Chips 18th ASA-routing A-Star Adaptive Routing Algorithm For NetwDocument13 pages2019 - ASA-routing A-Star Adaptive Routing Algorithm For Network-on-Chips 18th ASA-routing A-Star Adaptive Routing Algorithm For NetwHypocrite SenpaiNo ratings yet
- Intelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETDocument9 pagesIntelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETIJRASETPublicationsNo ratings yet
- Implementation of Shallow Underpasses atDocument8 pagesImplementation of Shallow Underpasses atSHANLEY JADE ILANONo ratings yet
- Comparison of SimTraffic and VISSIM Microscopi Traffic Simulation Tools in Modeling RoundaboutsDocument8 pagesComparison of SimTraffic and VISSIM Microscopi Traffic Simulation Tools in Modeling Roundaboutsiraqi-engNo ratings yet
- A Survey On The Characterization of Vehicular Ad Hoc Networks and Routing SolutionsDocument17 pagesA Survey On The Characterization of Vehicular Ad Hoc Networks and Routing SolutionsspattannNo ratings yet
- Application of Ls-Dyna in Numerical Analysis of Vehicle TrajectoriesDocument8 pagesApplication of Ls-Dyna in Numerical Analysis of Vehicle Trajectoriesmehrdad_so1981No ratings yet
- An Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesDocument12 pagesAn Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesAsma BenTiba Epouse KribiNo ratings yet
- A Model To Reduce Traffic Congestion in Colombo CiDocument7 pagesA Model To Reduce Traffic Congestion in Colombo CiLiki ThanNo ratings yet
- Batch 10 - 22cem3s01Document23 pagesBatch 10 - 22cem3s01AkashNo ratings yet
- Re-Engineering The Transmission Line Design Process PDFDocument8 pagesRe-Engineering The Transmission Line Design Process PDFReza RastegarNo ratings yet
- Design of Analytical Model and Algorithm For Optimal Roadside Ap Placement in VanetsDocument11 pagesDesign of Analytical Model and Algorithm For Optimal Roadside Ap Placement in VanetsArash AziminejadNo ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- Determination of Longitudinal Profile of Railway Track Using Vehicle-Based Inertial ReadingsDocument23 pagesDetermination of Longitudinal Profile of Railway Track Using Vehicle-Based Inertial ReadingsPratik ThakurNo ratings yet
- Simulation of Unsignalized T-Main PDFDocument13 pagesSimulation of Unsignalized T-Main PDFnyamebaaiericNo ratings yet
- Performance of VANET Through Realistic Large Scale Fading ChannelsDocument6 pagesPerformance of VANET Through Realistic Large Scale Fading ChannelsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Research Paper On Ad Hoc NetworkDocument7 pagesResearch Paper On Ad Hoc Networkukldyebkf100% (1)
- A Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETDocument4 pagesA Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETANas AliNo ratings yet
- Making Centroids and NodesDocument19 pagesMaking Centroids and NodesMarcoLuisDoradoPinedaNo ratings yet
- Development of A Hub and Spoke Model For Bus Transit Route Network DesignDocument10 pagesDevelopment of A Hub and Spoke Model For Bus Transit Route Network DesignHoras ManullangNo ratings yet
- Large-Scale Agent-Based Traffic Micro-Simulation ExperiencesDocument6 pagesLarge-Scale Agent-Based Traffic Micro-Simulation ExperiencesMubashir SheheryarNo ratings yet
- Tradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteesDocument22 pagesTradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteeseugeneNo ratings yet
- NETWORK ANALYSIS MODELS LINKS NODESDocument14 pagesNETWORK ANALYSIS MODELS LINKS NODESTamilmani Natarajan100% (3)
- Performance Analysis of Wireless Mesh Network Using Adaptive Informant Factor Based Optimized Channel AllocationDocument15 pagesPerformance Analysis of Wireless Mesh Network Using Adaptive Informant Factor Based Optimized Channel AllocationijcsesNo ratings yet
- Comparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosDocument14 pagesComparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosijngnNo ratings yet
- PHD Thesis Traffic SimulationDocument7 pagesPHD Thesis Traffic SimulationDoMyCollegePaperJackson100% (1)
- Research Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceDocument12 pagesResearch Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceRohit BudhwaniNo ratings yet
- Master Thesis Traffic CongestionDocument7 pagesMaster Thesis Traffic CongestionBuyEssaysCheapErie100% (2)
- Heterogeneous Traffic Ow Modelling: A Complete Methodology: Transportmetrica September 2011Document26 pagesHeterogeneous Traffic Ow Modelling: A Complete Methodology: Transportmetrica September 2011Mahindra DeshmukhNo ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- Agarwal and Lammel 2015Document6 pagesAgarwal and Lammel 2015Jaikishan DamaniNo ratings yet
- 10.1016@0191 26078490037 2Document2 pages10.1016@0191 26078490037 2JeanOscorimaCelisNo ratings yet
- Research Article: Fastroute: An Efficient and High-Quality Global RouterDocument19 pagesResearch Article: Fastroute: An Efficient and High-Quality Global RouterAditia GinantakaNo ratings yet
- A Simple Method For Estimation of Queue Length: Digitalcommons@University of Nebraska - LincolnDocument6 pagesA Simple Method For Estimation of Queue Length: Digitalcommons@University of Nebraska - LincolnAltaf HossainNo ratings yet
- Rail Wear Modelling: August 2017Document8 pagesRail Wear Modelling: August 2017Masud AlamNo ratings yet
- Iijcs 2014 06 20 014Document4 pagesIijcs 2014 06 20 014International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Aodv Protocol ThesisDocument4 pagesAodv Protocol ThesisSarah MarieNo ratings yet
- Non-Blind Watermarking of Network FlowsDocument13 pagesNon-Blind Watermarking of Network FlowsAhmed Al-ShwmiNo ratings yet
- Survey of Network Traffic ModelsDocument8 pagesSurvey of Network Traffic ModelsJasmine KNo ratings yet
- Delay and Jitter Analysis in LTE Networks: October 2016Document6 pagesDelay and Jitter Analysis in LTE Networks: October 2016dickNo ratings yet
- Sidra Solutions - Roundabouts PDFDocument23 pagesSidra Solutions - Roundabouts PDFovidiuchirvaseNo ratings yet
- Corsim Vs Vissim Urban StreetDocument12 pagesCorsim Vs Vissim Urban StreetTaharudin NoorNo ratings yet
- Next-Generation Variable-Line-Rate Optical WDM Networks: Issues and ChallengesDocument21 pagesNext-Generation Variable-Line-Rate Optical WDM Networks: Issues and ChallengesTú G ThaNo ratings yet
- Assignment 1Document6 pagesAssignment 1Bipin GyawaliNo ratings yet
- Vanet ResumeDocument2 pagesVanet ResumeFajrin Alfi SyahrinNo ratings yet
- Congestion Prediction in Vlsi RoutingDocument18 pagesCongestion Prediction in Vlsi RoutingAnushaChittiNo ratings yet
- ASON and GMPLS-Overview and ComparisonDocument21 pagesASON and GMPLS-Overview and Comparisonhlcmo hlcNo ratings yet
- Multi-Commodity Based Widest Congested Edge Disjoint Path Algorithm (MBWCEDP) Using MPLSDocument6 pagesMulti-Commodity Based Widest Congested Edge Disjoint Path Algorithm (MBWCEDP) Using MPLSRajni MehlaNo ratings yet
- S - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inDocument8 pagesS - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inijngnNo ratings yet
- Anapplication of Dijkstra's Algorithm To Shortest Route ProblemDocument13 pagesAnapplication of Dijkstra's Algorithm To Shortest Route ProblemGaurav KumarNo ratings yet
- Bogsjoe Et Al 2011 Paper Models Road Surface RoughnessDocument25 pagesBogsjoe Et Al 2011 Paper Models Road Surface RoughnessRoger BurtonNo ratings yet
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionFrom EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNo ratings yet
- United States Government and PoliticsDocument21 pagesUnited States Government and PoliticsTony BuiNo ratings yet
- Licence Acoknowledgement SlipDocument1 pageLicence Acoknowledgement SlipBicky ChoudhuryNo ratings yet
- Project Report ON: "Brand Preference of Onida Colour TV in Coastal OrissaDocument66 pagesProject Report ON: "Brand Preference of Onida Colour TV in Coastal OrissaApurba KhanduriNo ratings yet
- Manual For The Implementation of International Development Cooperation Projects of SloveniaDocument7 pagesManual For The Implementation of International Development Cooperation Projects of SloveniarefikrosicNo ratings yet
- 11.30 Imran Akram IA CementDocument12 pages11.30 Imran Akram IA CementParamananda SinghNo ratings yet
- Modeling Drop Structures in HEC-RAS 3.1Document29 pagesModeling Drop Structures in HEC-RAS 3.1reluNo ratings yet
- Literature Review On School AdministrationDocument6 pagesLiterature Review On School Administrationea7sfn0f100% (1)
- Liftking Forklift PDIDocument1 pageLiftking Forklift PDIManual ForkliftNo ratings yet
- (GR No. 15574) Smith, Bell & Co Vs NatividadDocument18 pages(GR No. 15574) Smith, Bell & Co Vs Natividadshopee onlineNo ratings yet
- Integral Abutment Bridge Design (Modjeski and Masters) PDFDocument56 pagesIntegral Abutment Bridge Design (Modjeski and Masters) PDFAnderson UrreaNo ratings yet
- Calculation of absorption properties of absorbent materialsDocument4 pagesCalculation of absorption properties of absorbent materialsRezaul Karim TutulNo ratings yet
- 524 799 Coach - K - Coach - Knight - CaseDocument15 pages524 799 Coach - K - Coach - Knight - Casekaushalmighty100% (1)
- 4 AppleDocument9 pages4 AppleSam Peter GeorgieNo ratings yet
- State Board of Education Memo On Broward County (Oct. 4, 2021)Document40 pagesState Board of Education Memo On Broward County (Oct. 4, 2021)David SeligNo ratings yet
- Chapter OneDocument14 pagesChapter Oneogunseyeopeyemi2023No ratings yet
- Extracting Data From GpsDocument7 pagesExtracting Data From GpsRidhima KhajuriaNo ratings yet
- Product Information Flyer: Producto RI-923Document2 pagesProduct Information Flyer: Producto RI-923sobheysaidNo ratings yet
- Media Palnning ProcessDocument3 pagesMedia Palnning ProcessSrinivas KumarNo ratings yet
- Working Capital Management OF: Submitted by Priya BanerjeeDocument102 pagesWorking Capital Management OF: Submitted by Priya BanerjeeSushmita BarlaNo ratings yet
- Databases 2 Exercise Sheet 4Document2 pagesDatabases 2 Exercise Sheet 4Shivam ShuklaNo ratings yet
- Quy Trình AgencyDocument4 pagesQuy Trình Agencyson nguyenNo ratings yet
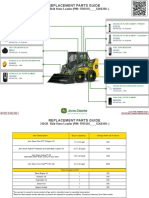
- 312GR Skid Steer Loader PIN 1T0312G G366358 Replacement Parts GuideDocument3 pages312GR Skid Steer Loader PIN 1T0312G G366358 Replacement Parts GuideNelson Andrade VelasquezNo ratings yet
- Nitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's EncyclopediaDocument49 pagesNitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's Encyclopediapoly6icsNo ratings yet
- Mobile Scaffold Inspection ChecklistDocument3 pagesMobile Scaffold Inspection Checklistanthony murphyNo ratings yet
- Chapter - 1 NetworksDocument61 pagesChapter - 1 NetworksSummiya JangdaNo ratings yet
- Draft WPSDocument3 pagesDraft WPSWale OyeludeNo ratings yet
- Stolle Cupping Systems: ConnectingDocument2 pagesStolle Cupping Systems: ConnectingHieu NguyenNo ratings yet