You might also like
- Novel Rotor-Flux Observer Using Observer Characteristic Function in Complex Vector Space For Field-Oriented Induction Motor DrivesDocument10 pagesNovel Rotor-Flux Observer Using Observer Characteristic Function in Complex Vector Space For Field-Oriented Induction Motor DrivesUma SathyadevanNo ratings yet
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanNo ratings yet
- 653412thu Zar MonDocument7 pages653412thu Zar MonFERNANDO PINTO ALANo ratings yet
- A Frequency Domain Detection of Stator WDocument8 pagesA Frequency Domain Detection of Stator Wfares noureddineNo ratings yet
- Analysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DriveDocument8 pagesAnalysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DrivemitsuiNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanysybaritzNo ratings yet
- JPark 20 TM08Document10 pagesJPark 20 TM08Iraqi stormNo ratings yet
- Notes 1Document8 pagesNotes 1VIVEK AHLAWATNo ratings yet
- A Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous MachinesDocument3 pagesA Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous Machinesafru2000No ratings yet
- IEEEXploreDocument7 pagesIEEEXploresvan4284No ratings yet
- A Comprehensive Analysis of Magnet DefecDocument10 pagesA Comprehensive Analysis of Magnet DefecNAOUREZ BEN HADJNo ratings yet
- 2014 - 06 - Analysis of Flux-Linkage Characteristics of Switched Reluctance Linear Generator 5pDocument5 pages2014 - 06 - Analysis of Flux-Linkage Characteristics of Switched Reluctance Linear Generator 5pdanilonobre3508No ratings yet
- Bous Sak 2005Document11 pagesBous Sak 2005Adriano NavarroNo ratings yet
- Calculation and Analysis of Unbalanced Magnetic Pulls of Different Stator Winding Setups in Static Eccentric Induction MotorDocument9 pagesCalculation and Analysis of Unbalanced Magnetic Pulls of Different Stator Winding Setups in Static Eccentric Induction Motor9096664279No ratings yet
- R.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, EgyptDocument5 pagesR.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, Egyptmarcelo_oliveira_limaNo ratings yet
- ROTOR StrikingDocument3 pagesROTOR StrikingDearRed FrankNo ratings yet
- SRM Using Arduino PDFDocument9 pagesSRM Using Arduino PDFChristian AztecaNo ratings yet
- Sensorless Vector Controller For A Synchronous Reluctance MotorDocument9 pagesSensorless Vector Controller For A Synchronous Reluctance MotorUma SathyadevanNo ratings yet
- A Time-Stepping Coupled Finite Element-State Space Model For Im DrivesDocument3 pagesA Time-Stepping Coupled Finite Element-State Space Model For Im Drivessajs201100% (1)
- CDocument5 pagesCSaptarshi Pal ChaudhuriNo ratings yet
- DC Analitic SystemDocument6 pagesDC Analitic SystemDobai SzilardNo ratings yet
- Wind Dfig Paper PDFDocument10 pagesWind Dfig Paper PDFShraddha VardikarNo ratings yet
- FluxDocument6 pagesFluxDobai SzilardNo ratings yet
- Solid-Rotor Induction Motor Modeling Based On CircDocument16 pagesSolid-Rotor Induction Motor Modeling Based On CircIraqi stormNo ratings yet
- Improved Power Transformer Winding Fault Detection Using FRA Diagnostics Part 1 Axial Displacement SimulationDocument8 pagesImproved Power Transformer Winding Fault Detection Using FRA Diagnostics Part 1 Axial Displacement Simulationdibyaranjan barikNo ratings yet
- Design and Analysis of General Rotor-Flux-Oriented Vector Control SystemsDocument8 pagesDesign and Analysis of General Rotor-Flux-Oriented Vector Control SystemsLeonardo Solis ZamoraNo ratings yet
- Demostracion de Arranque Por Inversion de Polaridad PDFDocument3 pagesDemostracion de Arranque Por Inversion de Polaridad PDFAlejandro Roldan MolinaNo ratings yet
- Novel Flux Linkage Estimation Algorithm For A Variable Flux PMSMDocument17 pagesNovel Flux Linkage Estimation Algorithm For A Variable Flux PMSMViệt Anh PhạmNo ratings yet
- An Air-Gap-Flux-Oriented Vector Controller For Stable Operation of Bearingless Induction MotorsDocument8 pagesAn Air-Gap-Flux-Oriented Vector Controller For Stable Operation of Bearingless Induction MotorsmukeshNo ratings yet
- Analysis of Shaft Voltage of Large TurboDocument2 pagesAnalysis of Shaft Voltage of Large TurbohamidrezaNo ratings yet
- Simulation Study On Direct Torque Control of Induction Motor Using Neural NetworkDocument5 pagesSimulation Study On Direct Torque Control of Induction Motor Using Neural NetworkPraful YadavNo ratings yet
- Modeling, Parameter Measurement and Sensorless Speed Estimation of IPM Synchronous Generator For Direct Drive Variable Speed Wind Turbine ApplicationDocument17 pagesModeling, Parameter Measurement and Sensorless Speed Estimation of IPM Synchronous Generator For Direct Drive Variable Speed Wind Turbine ApplicationLawiii KkkNo ratings yet
- Optimal Scheme For Structural Design of Large Turbogenerator Stator End WindingDocument10 pagesOptimal Scheme For Structural Design of Large Turbogenerator Stator End WindingmanojkumarNo ratings yet
- Phase Inductance Estimation For Switched Reluctance Motor Using Adaptive Neuro-Fuzzy Inference SystemDocument9 pagesPhase Inductance Estimation For Switched Reluctance Motor Using Adaptive Neuro-Fuzzy Inference Systemakoca23No ratings yet
- Modeling and Simulation of A 3 InductiDocument9 pagesModeling and Simulation of A 3 InductiLala's gamingNo ratings yet
- Simulation by Composite ModelDocument8 pagesSimulation by Composite Modelanshgarg786No ratings yet
- CircuitTheory of ReluctanceMachines - PartIIDocument11 pagesCircuitTheory of ReluctanceMachines - PartIITaiwoNo ratings yet
- A I RS: David G. Dorrell, William ThomsonDocument11 pagesA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNo ratings yet
- PMSM Modelling PaperDocument12 pagesPMSM Modelling Paperpranay uniyalNo ratings yet
- Modeling of Electrodynamic Bearings: Nicola Amati Xavier de Lépine Andrea TonoliDocument9 pagesModeling of Electrodynamic Bearings: Nicola Amati Xavier de Lépine Andrea TonoliDávid RúraNo ratings yet
- Direct Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorDocument4 pagesDirect Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorBook4AllNo ratings yet
- 2013 - Sensorless Control in SRM Drives For Four Quadrant OperationDocument5 pages2013 - Sensorless Control in SRM Drives For Four Quadrant OperationMarcelo Vinicius de PaulaNo ratings yet
- Steady State Analysis of Synch To No UsDocument4 pagesSteady State Analysis of Synch To No UsJara FeyisaNo ratings yet
- Main 1Document6 pagesMain 1hamidrezaNo ratings yet
- 9470 English TarjomeFaDocument10 pages9470 English TarjomeFatusarNo ratings yet
- Publishedvershion AxialDocument9 pagesPublishedvershion AxialCaio FlemingNo ratings yet
- A Simplified Dynamical Model of Mixed Eccentricity Fault in A Three-Phase Induction MotorDocument11 pagesA Simplified Dynamical Model of Mixed Eccentricity Fault in A Three-Phase Induction Motorm.ebrahim moazzenNo ratings yet
- The Technology and Application of Voice Coil Actuator: X.M.Feng, Z.J.Duan, Y.Fu, A.L.Sun D.W.ZhangDocument4 pagesThe Technology and Application of Voice Coil Actuator: X.M.Feng, Z.J.Duan, Y.Fu, A.L.Sun D.W.ZhangjarkaasNo ratings yet
- Combined Electrical and Mechanical Model of Electric Submersible PumpsDocument7 pagesCombined Electrical and Mechanical Model of Electric Submersible PumpsgilangpasekaNo ratings yet
- Modeling and Simulation of Saturated Induction Motors in Phase QuantitiesDocument8 pagesModeling and Simulation of Saturated Induction Motors in Phase Quantitiesnina kameniNo ratings yet
- Direct Torque Control of PWM Inverter-Fed AC Motors - A SurveyDocument15 pagesDirect Torque Control of PWM Inverter-Fed AC Motors - A SurveyPraful YadavNo ratings yet
- Space Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/SimulinkDocument10 pagesSpace Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/Simulinklojain centerNo ratings yet
- Vector Control SynRMDocument9 pagesVector Control SynRMMusical CreationsNo ratings yet
- Effects Rotor Eccentricity and Parallel Windings On Induction Machine Behavior: Study Using Finite Element AnalysisDocument7 pagesEffects Rotor Eccentricity and Parallel Windings On Induction Machine Behavior: Study Using Finite Element AnalysisRawaz AzizNo ratings yet
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocument4 pagesAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNo ratings yet
- 1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesDocument11 pages1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesPhạm Văn TưởngNo ratings yet
- 4 Wind Turbine GeneratorsDocument14 pages4 Wind Turbine Generatorsabhishek dubeyNo ratings yet
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Atex Window Air Conditioner2 PDFDocument2 pagesAtex Window Air Conditioner2 PDFJGlobexNo ratings yet
- Lpa 80040 8CF Edin XDocument1 pageLpa 80040 8CF Edin Xmiguelona1304No ratings yet
- 24 Silicon Controlled Rectifier ProjectsDocument164 pages24 Silicon Controlled Rectifier ProjectsghebarnaNo ratings yet
- LCOE Calculator 1Document44 pagesLCOE Calculator 1Jorge Isaac Flores SamaniegoNo ratings yet
- Minimum Clearance of Overhead PolesDocument3 pagesMinimum Clearance of Overhead PolesMd MohsinNo ratings yet
- Mcguire Nuclear Station Ufsar Chapter 8Document70 pagesMcguire Nuclear Station Ufsar Chapter 8Nathan BlockNo ratings yet
- Corometrics 170 Monitor - Service Manual (120-248)Document129 pagesCorometrics 170 Monitor - Service Manual (120-248)Igor78No ratings yet
- Tirth Patel Se Etrx 2019110040: Ed Exp 8: Jfet Amplifier DesignDocument9 pagesTirth Patel Se Etrx 2019110040: Ed Exp 8: Jfet Amplifier DesignHitanshu JainNo ratings yet
- Kipor - KDE7000T Generator-EnDocument20 pagesKipor - KDE7000T Generator-EnEzzadin Baban50% (4)
- SS 400 500L1U Power SupplyDocument1 pageSS 400 500L1U Power SupplyRoan Roan RuanNo ratings yet
- E4G6Document6 pagesE4G6Liecell CabalesNo ratings yet
- 3A - Dielectric MaterialsDocument75 pages3A - Dielectric MaterialsrailrajNo ratings yet
- 2m 144mhz-146mhz ReceiverDocument14 pages2m 144mhz-146mhz ReceiverGeorge Leong100% (1)
- EC I, Nba 1Document4 pagesEC I, Nba 1Sudha PrabakaranNo ratings yet
- Amplitude Smple Pprs Physics XIIDocument11 pagesAmplitude Smple Pprs Physics XIIKOMAL NAVARIYANo ratings yet
- Impact AC/DC-6 Gang ChargerDocument1 pageImpact AC/DC-6 Gang Chargerdonald_wilson4741No ratings yet
- Ballistic GalvanometerDocument5 pagesBallistic GalvanometerReddyvari Venugopal100% (2)
- 17.7297 Vung Tau E22 - 08 ChartDocument4 pages17.7297 Vung Tau E22 - 08 ChartnemochuNo ratings yet
- Single Phase Multi-Level PWM Inverter Topologies Using Coupled InductorsDocument7 pagesSingle Phase Multi-Level PWM Inverter Topologies Using Coupled InductorskvhkrishnanNo ratings yet
- P4SMA62A E3 61 - VishayDocument5 pagesP4SMA62A E3 61 - VishayFranz JAHLNo ratings yet
- APGENCO 2011 Sub-Engineer Question Paper (Memory Based) - Indian ShoutDocument8 pagesAPGENCO 2011 Sub-Engineer Question Paper (Memory Based) - Indian ShoutnaveensilveriNo ratings yet
- HP-AN1244-1 - Minimizing Intrusion Effects When Probing With A Logic AnalyzerDocument16 pagesHP-AN1244-1 - Minimizing Intrusion Effects When Probing With A Logic Analyzersirjole7584No ratings yet
- Service Manual: LCD TVDocument78 pagesService Manual: LCD TVlivinggood58No ratings yet
- Opzv Series: Tubular Gel BatteryDocument4 pagesOpzv Series: Tubular Gel BatteryAhmed ZeharaNo ratings yet
- Lab 1 Basic Logis GatesDocument11 pagesLab 1 Basic Logis GatesHazeem JokeNo ratings yet
- User Manual HI 9814-1Document2 pagesUser Manual HI 9814-1Luis Arturo RicoNo ratings yet
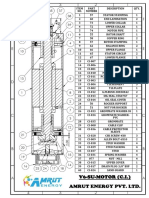
- Amrut Energy Pvt. Ltd. V6-SU-MOTOR (C.I.) V6-SU-MOTOR (C.I.)Document1 pageAmrut Energy Pvt. Ltd. V6-SU-MOTOR (C.I.) V6-SU-MOTOR (C.I.)IMTB MumbaiNo ratings yet
- Ishan Research Paper Formatted1Document8 pagesIshan Research Paper Formatted1Harsh PandeyNo ratings yet
- Danaher Motion - Kollmorgen AKM Series DatasheetDocument46 pagesDanaher Motion - Kollmorgen AKM Series Datasheetcristian2340No ratings yet
- Leroy Somer Rating Chart 4607j - enDocument24 pagesLeroy Somer Rating Chart 4607j - enEmraan MughalNo ratings yet